
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор метода измерения. Оценка погрешностей методов измерения и выбор разрядности переменных ⇐ ПредыдущаяСтр 3 из 3
4.2.1 Датчик частоты вращения коленчатого вала двигателя Датчик использует импульсы системы зажигания. Т.е. одному обороту коленчатого вала соответствуют 4 импульса датчика для 4-х цилиндрового двигателя. При максимальных оборотах интервал между импульсами составит
Dt8000=60/4*nmax=1, 875 мс. (4.7) Рассмотрим метод измерения частоты с помощью подсчета числа импульсов за измерительный интервал времени DT=1 сек. Максимальная частота импульсов составит 533, (3) Гц. Относительная инструментальная погрешность измерения частоты, при времени измерения DT=1 сек, составит
bN=Dt/DT = 0, 001875, (4.8)
а абсолютная
Dn=bN*nmax=15 об/мин. (4.9)
Минимальная частота следования импульсов, соответствующая значению измеряемых оборотов 100 об/мин, равна f100=6, 6 Гц, интервал между импульсами составит Dt100=60/4*nmin=150 мс. Относительная инструментальная погрешность измерения частоты, при времени измерения DT=1 сек, составит
bN=Dt/DT = 0, 15, а абсолютная Dn=bN*nmin=15 об/мин.
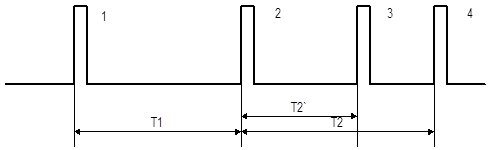
Заданная погрешность измерения частоты составляет 10 об/мин. Для получения погрешности измерения менее 10 об/мин требуется другой метод измерения частоты. В данном случае это метод измерения длительности периода следования импульсов. За T принимается измеренное значение периода следования импульсов, Dt - шаг квантования по времени. К определению достоверности измерения периода
Рис.4.4.
Требуемая относительная погрешность измерения по времени составит
e=Dn /nmax=10/8000=0, 00125.
Значение кванта времени можно определить как
Dt< Dt8000*e=0, 0023 мс.
Выберем Dt=2 мкс. При этом инструментальная погрешность измерения периода равна
bT=Dt/T = 0, 001067< e.
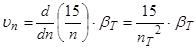
Трансформированная погрешность вычисления частоты из периода по формуле =60/(4*nT), (4.10)
где nТ - число квантов времени в периоде, равна
Так как приближенных методов вычислений не используется, то методическая погрешность вычисления операции деления будет равна инструментальной погрешности представления переменных. Диапазон измеряемых значений длительности составляет nT=937…75000. Разрядность переменной N[nT]=17. Методическая погрешность:
mn=bn=1/218=3, 8× 10-6.
Для определения достоверности считываемой информации (рис.4.4), производится последовательное вычисление значений периода до тех пор, пока разница между соседними измеренными значениями будет не более T*eдоп. Выберем eдоп=10%. На рисунке 4.4 изображены 1, 2, 4 - истинные импульсы, 3 - импульс помехи, T2` - ложное измеренное значение периода. Для усреднения измеренных значений применим скользящее сглаживание, в результате которого значение периода на шаге i будет равно i=(Ti-1+T1+T2)/3. (4.12)
В результате, общая погрешность измерения частоты вращения вала двигателя равна
x=max|m|+ max|n|+max|b|=3, 8× 10-6+0, 018× 10-6+0, 001067 x=0, 01071< e.
Суммарная погрешность не превышает заданной.
4.2.2 Датчик скорости Датчик скорости формирует на выходе 6004 имп./км. В таблице 4.1 приведены значения частоты следования импульсов и их период для крайних значений диапазона измеряемых значений скорости.
Таблица 4.1 Характеристики датчика скорости
Для измерения значения скорости с заданной погрешностью используем метод вычисления частоты следования импульсов (подсчет числа импульсов за время измерения), так как при допустимом времени измерения 1 сек (максимально возможное время индикации) Инструментальная погрешность датчика при измерения частоты составит:
bVдатч=Dt/DT = 5*0, 12/1=0, 6 км/ч.
Так как приближенных методов нет, то методическая погрешность составит mV=0. Заданная абсолютная погрешность равняется DV=1 км/ч. Относительная максимальная допустимая погрешность равна
eV=DV/Vmin=1/5=0, 2.
Для выполнения условия баланса ошибок системы
eV> |bVдатч|+|bV|,
где bV - инструментальная погрешность вычислительного устройства, необходимо выбрать разрядность переменных, чтобы bVдатч> bV. Разрядность переменных будет определяться аналогично разрядности входного преобразователя, то есть
где Vmin=8, 3388 Гц, max=333, 55 Гц, s=eV=0, 2, r=0, 4.
Тогда NV=11. То есть для получения заданной инструментальной погрешности вычислительного устройства, разрядность переменной измерения частоты сигнала датчика скорости составляет NV=11 бит.
|
Последнее изменение этой страницы: 2020-02-16; Просмотров: 162; Нарушение авторского права страницы
 =0, 018× 10-6. (4.11)
=0, 018× 10-6. (4.11)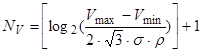 ,
,