|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Характеристика зависимости потребляемой мощности от полезной мощности на валу двигателя.
Эта характеристика представляет собой следующую зависимость: I=f(P2) при U=const и IВ=const (10) Потребляемая из сети мощность электрическим двигателем в общем случае определяется как
В этом выражении ток, потребляемый двигателем, представляет собой сумму токов в обмотке якоря и обмотке возбуждения, то есть I = Iя + Iв. В общем случае ток возбуждения имеет незначительную величину, обычно не превышает 7% от номинального значения тока якоря, и им допустимо пренебречь. Это позволяет с некоторым приближением представить, что
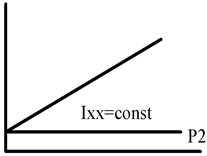
Так как подводимое к двигателю напряжение и ток возбуждения при снятии характеристики остаются неизменными, то потребляемая мощность двигателем будет иметь прямую пропорциональную зависимость от тока якоря, то есть В свою очередь изменение тока якоря с увеличением полезной мощности Iя = f (Р2 ), как было указано выше рис.13.1. Но так как
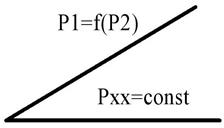
будет соответствовать режиму холостого хода. С увеличением же полезной мощности Р2 потребляемая мощность P1 , выражение (12), как и ток якоря, выражение (9), будет иметь линейную возрастающую функцию. Зависимость, рис. 2, можно пояснить и другим способом. Потребляемая мощность двигателем P1 тратится на полезную мощность Р2 и на суммарные потери мощности в электрическом двигаля
Суммарные потери мощности в электрических машинах, как правило, составляют ( 7...20)% от потребляемой мощности. Причем меньшее их значение относится к машинам большей мощности. Учитывая, что потери мощности в основном незначительны по сравнению с полезной, а тем более с потребляемой мощностью, то они не могут оказать существенного влияния на различие в изменениях потребляемой и полезной мощностей. При этом можно говорить, что потребляемая мощность меняется так же, как и полезная. То есть зависимость P1 = f (Р2) в соответствии с выражением (14 ) имеет практически прямую линию. Причем при Р2=0 потребляемая мощность будет расходоваться на потери мощности холостого хода ∆ Рхх и на потери в обмотке возбуждения ∆ Pв:
Электрические потери мощности ∆ Рп принято называть постоянными потерями, не зависящими от нагрузки на валу двигателя, а соответственно и от тока, потребляемого двигателем. Если в первом приближении пренебречь потерями в обмотке возбуждения из-за незначительной величины тока возбуждения, то при Р2 = 0 можно принять, что постоянные потери мощности I будут равны потерям холостого хода, то есть ∆ Рп ≈ ∆ Рхх. В действительности же при работе двигателя существуют и переменные потери, зависящие от тока, потребляемого двигателем (от I тока, протекающего по обмотке якоря). В режиме холостого хода (при Р2 = 0 ) Iя = Ixx. Из - за малого значения этого тока им вполне можно пренебречь. С увеличением полезной мощности, а соответственно и тока якоря, эти ( переменные ) потери начинают возрастать и их влияние, незначительно, но начинает уже сказываться. Прямая рис. 13.2, будет несколько загибаться вверх (на графике это изменение не показано).
Скоростная характеристика Эта характеристика представляет собой зависимость
Частота вращения двигателя определяется из выражения (1):
В этом выражении не учитывается дополнительное сопротивление обмотки якоря, так как в действительности при наборе оборотов двигателя и появлении противо - ЭДС оно выводится. В предыдущей характеристике, выражение (9), было показано, что изменение тока якоря и полезной мощности связаны прямой пропорциональной зависимостью. С учетом этого для большей наглядности характера изменения частоты вращения проведем не от полезной мощности, а от тока якоря по выражению (16). Для единообразия графическую зависимость построим в координатах n и Р2, учитывая, что Iя = Р2. По условию скоростной характеристики напряжение сети, равное номинальному значению, и ток возбуждения не меняются. В этом случае частота вращения двигателя зависит только от двух составляющих: от величины магнитного потока Ф и от потери напряжения в обмотке якоря (Iя • Rя). При Р2 = 0 с учетом выражения (9) Iя = Ixx, а частота вращения двигателя (по выражению 16) будет соответствовать режиму холостого хода nхх. В общем случае ток холостого хода Ixx не превышает 10% номинального значения тока двигателя Iн. Как правило, он может находиться в пределах Ixx = ( 3...8 )% от Iн [1]. Учитывая также весьма незначительную величину сопротивления Обмотки якоря Rя, можно принять, что Ixx • Rя≈ 0. Тогда частота вращения двигателя в режиме холостого хода определится как
С увеличением тока якоря возрастет произведение Iя∙ Rя и частота вращения двигателя уменьшается. С другой стороны, несмотря на постоянное значение тока возбуждения, основной магнитный поток при работе двигателя с увеличением тока обмотки якоря уменьшается из-за реакции якоря. Уменьшение же магнитного потока двигателя приводит к увеличению его частоты вращения ( 16 ). Следовательно, увеличение потери напряжения в обмотке якоря и уменьшение магнитного потока влияют противоположно на изменение частоты вращения двигателя. При увеличении тока якоря (полезной мощности) вид характеристики по выражению (16) определяется результирующим действием этих факторов. Если будет преобладать потеря напряжения в обмотке якоря над уменьшением магнитного потока, то скоростная характеристика будет падающей (зависимость 1, рис.13.3). При преобладании уменьшения магнитного потока над потерями напряжения в обмотке якоря частота вращения двигателя будет возрастать (зависимость 2). В том случае если указанные факторы компенсируют друг друга, то частота вращения будет оставаться неизменной (зависимость 3). 1я = f(P2)
Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 2745; Нарушение авторского права страницы
 (11)
(11) (12)
(12) ,
,  , (13)
, (13) то есть:
то есть:  (14)
(14) (15)
(15)
 (16)
(16) (17)
(17)