|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Характеристика изменения КПД
Эта характеристика (рис. 5) имеет зависимость:
КПД двигателя связан с полезной мощностью соотношением
где -
В общем случае суммарные потери мощности включают следующие составляющие:
Где ∆ ∆ ∆ Потери холостого хода в свою очередь состоят из механических ∆ Рмех и магнитных ∆ Рмаг потерь мощности, то есть
Рис. 13.5. Характеристика изменения КПД двигателя постоянного тока параллельного возбуждения при изменении полезной мощности. Механические потери ∆ Рмех представляют собой потери мощности в подшипниках, потери, обусловленные трением щеток о коллектор и вентиляционные потери, связанные с трением о воздух вращающихся частей. Механические потери двигателя не зависят от нагрузки на его валу, а определяются частотой его вращения. Как правило они находятся в пределах (0, 5...2 ) % от номинальной мощности машины. Магнитные потери ∆ Рмаг ( иногда их называют потерями в стали) - это потери на гистерезис и вихревые токи, вызванные перемагничиванием активной стали якоря. В общем случае магнитные потери могут составлять примерно ( 2...6 )%, а потери холостого хода ∆
где ∆ Рв - потери мощности в цепи обмотки возбуждения;
∆ Uщ∙ Iя - потери мощности в переходном контакте между щетками и коллектором.
Потери мощности в обмотке возбуждения определяются как
и составляют в пределах ( 1... 3)% от номинальной мощности электродвигателя [12]. Если допустить, что сопротивление обмотки якоря во время работы двигателя остается. практически неизменным ( хотя в действительности оно будет меняться в зависимости от температуры провода обмотки), то можно написать, что Потеря напряжения в щеточных контактах имеет сложную зависимость от разных факторов. Поэтому для упрощения обычно принимают, что для металлоугольных щеток Δ Uщ=0, 3 В, а для графитовых и угольных в среднем Δ Uщ=1В [1]. Поэтому, если считать потери напряжения в щеточных переходах с некоторыми допущениями постоянными, то справедливо, что Δ Uщ·Iя=Iя. К электрическим потерям относят и потери в сопротивлениях, включаемых последовательно с обмоткой якоря и обмоткой возбуждения. Добавочные потери Δ Рд, обусловлены вторичными процессами электромагнитного характера при работе электрического двигателя, в частности искажением основного магнитного поля из-за реакции якоря и магнитными полями, появляющимися в проводниках обмотки якоря в момент их коммутации щетками. Они также вызываются вихревыми токами в проволочных бандажах, в крепежных деталях и т.д. Эти потери пропорциональны квадрату тока обмотки якоря т.е. Рд=I2я. Добавочные потери имеют сложный расчет и определяются опытным путем. Как правило, они составляют 0, 5% от номинальной мощности двигателя с компенсационной обмоткой и 1% - без компенсационной обмотки [1, 3, 5, 12]. В выражении (23) некоторые составляющие суммарных потерь мощности, в частности, Δ Рхх и Δ Рв, выражение (26), как уже указывалось, не зависит от нагрузки двигателя (от тока обмотки якоря) и носят название постоянных потерь мощности Δ Рп, выражение (15). Потери же мощности в обмотке якоря, в щеточных контактах и добавочные потери, т.е. I2я·Rя, Δ Uщ·Iя и Δ Рд, зависят от нагрузки двигателя Р2 и носят название переменных потерь мощности. Значение КПД с увеличением полезной мощности Р2 сначала, в пределах (0…0, 25) номинальной мощности двигателя, растет, рис.13.5, и имеет практически прямопропорциональную зависимость. Далее с увеличением Р2 начинают сказываться электрические потери мощности, пропорциональные квадрату тока якоря, заметно замедляя рост КПД. В пределах от 0, 5 до номинального значения мощности двигателя КПД остается практически неизменным. КПД достигает максимальной величины при равенстве постоянных и переменных потерь мощности, зависящих от тока в квадрате, то есть при
Как правило, КПД достигает своего наибольшего значения при 75% номинальной мощности двигателя. Для примера в таблице1 приведены виды потерь и их значения машины постоянного тока мощностью 500 кВт, напряжением 460 В и с частотой вращения 375 об/мин [ 1 ].
Таблица 1. Потери мощности для машины постоянного тока мощностью 500 кВт
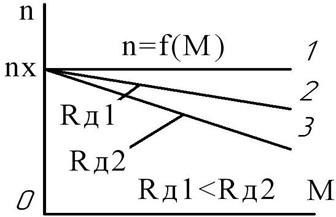
Механическая характеристика Механическая характеристика представляется зависимостью: n=f(M) при U=const и Iв=const (28) Анализ. изменения механической характеристики проведем с учетом выражения (1), заменив в нем ток якоря по выражению (5):
Частота вращения двигателя параллельного возбуждения в режиме холостого хода, определяется выражением:
Как известно, ток холостого хода и сопротивление обмотки якоря имеют небольшие значения и их произведением в данном случае можно пренебречь, тогда
С учетом этого частота вращения может быть представлена по выражению (29) следующим образом:
Если считать, что частота вращения в режиме холостого хода и ток возбуждения, а соответственно и магнитный поток при снятии механической характеристики, остаются неизменными, то частота вращения двигателя с учетом выражений (29) и (32) будет иметь линейную зависимость при изменении момента вращения (рис.13.6). В режиме холостого хода при М = 0 частота вращения будет равна nхх. С увеличением нагрузки на двигатель, а соответственно и момента вращения, вырабатываемого двигателем, механическая характеристика будет представлять собой практически прямую линию, наклоненную к оси абсцисс. Если добавочное сопротивление в цепи якоря отсутствует, то такая характеристика носит название естественной механической характеристики (характеристика 1, рис.13.6). При наличии дополнительных сопротивлений в цепи обмотки якоря снятые характеристики носят названия искусственных механических характеристик ( характеристики 2 и 3, рис.13.6). Причем из выражения (29) видно, что чем больше дополнительное сопротивление, включенное последовательно с обмоткой якоря, тем более значительный наклон имеет соответствующая искусственная механическая характеристика. Отразить наклон искусственных механических характеристик можно с помощью отношения
Для устойчивой работы двигателя, как и в случае скоростных характеристик, механические характеристики должны иметь наклон к оси абсцисс, то есть быть падающими характеристиками.
Задание и методика выполнения работы 1. Собрать схему, рис.13.7. Амперметры PA1, PA2, PA3 выбираются в соответствии с возможными токами в цепях обмоток
Рис. 13.6. Механические характеристики двигателя постоянного тока параллельного возбуждения: 1-естественная характеристика; 2, 3 - искусственные механические характеристики.
Рис.13.7. Схема для снятия характеристик двигателя постоянного тока параллельного возбуждения возбуждения и якоря двигателя постоянного тока, а также в обмотке статора асинхронного двигателя АД при выполнении опытов лабораторной работы. 2.Установить дополнительное сопротивление в цепи обмотки якоря такой величины, при которой пусковой ток не превысит в (1, 5...2, 5 ) раза номинальный ток двигателя, а дополнительное сопротивление в обмотке возбуждения - минимальным. 3.Установить максимальное значение сопротивления Rt, задаваемое преподавателем, в цепи обмоток статора АД. Этот двигатель при подаче на его обмотки статора постоянного напряжения вызывает тормозной момент для двигателя постоянного тока. Причем, чем больше постоянный ток, протекающий по обмоткам статора АД, тем больше тормозной момент. 4.Подать постоянное напряжение 220 В на двигатели в соответствии с рис.13.7. 5.Уменьшая сопротивление R т от его установленного максимального значения, снять 7...9 замеров тока торможения Iт по амперметру РАЗ, тока якоря Iя по амперметру РА2, тока возбуждения 1в по амперметру РА1и частоты вращения двигателя п по тахометру ( в схеме он не указан, но должен быть для выполнения работы ). Увеличивая ток торможения, следует особо следить за тем, чтобы он не превысил номинальную величину тока обмотки статора АД. 6.Во время проведения опыта подводимое напряжение к двигателям, контролируемое по вольтметру PV, и ток обмотки возбуждения должны оставаться постоянными. Неизменность тока возбуждения поддерживается с помощью сопротивления Rв, установленного последовательно с обмоткой возбуждения. 7.На основе полученных замеров вычислить момент вращения М, мощность, потребляемую из сети P1, полезную мощность Р2 и КПД 8.Полученные данные занести в таблицу 2. 9.Величина момента вращения двигателя определяется из таблицы 3, отражающей зависимость М = f( Iт). Остальные параметры, необходимые для построения характеристик, можно определить следующим образом: мощность, потребляемая двигателем, P1 = U·I; полезная мощность двигателя, Р2 = 0, 105- М; КПД двигателя, n = (Р2/ P1) • 100%; ток, потребляемый двигателем, I = Iя + Iв. Где P1 и Р2 в Вт; М, в Н·м и n, в мин-1; Таблица 2.
Контрольные вопросы и задания для самостоятельной подготовки 1.Указать зависимость скоростной характеристики и пояснить характер ее изменения. 2.Почему характеристика КПД в начале имеет практически прямопропорциональную зависимость от полезной мощности, а затем почти не меняется? 3.Как при работе двигателя перейти на искусственную механическую характеристику? 4.Какой вид будет иметь скоростная характеристика, если бы основной магнитный поток оставался неизменным? 5.В каких пределах меняется частота вращения двигателя по отношению к частоте вращения холостого хода при изменении нагрузки от нуля до номинального значения? 6.Можно ли частоту вращения при номинальной нагрузке увеличить до частоты вращения в режиме холостого хода и чем это достигается? 7.Какой вид скоростной характеристики двигателя падающий или возрастающий ) более предпочтителен и почему? 8.Указать зависимость моментной характеристики. 9.Изобразить графическую зависимость момента, развиваемого двигателем, полезного момента и момента холостого хода от изменения полезной мощности. 10.Чем объясняется загиб моментной характеристики при увеличении полезной мощности? 11.При каком соотношении постоянных и переменных потерь мощности наступает максимум КПД двигателя? 12.Каким выражением могут быть связаны полезная мощность и полезный момент вращения? 13.При каком значении полезной мощности КПД достигает своей максимальной величины? 14.Написать уравнение механической характеристики. 15.Почему на естественной механической характеристике частота вращения двигателя выше, чем на искусственной при одинаковом неизменном моменте сопротивления?
Таблица 3 Определение момента вращения двигателя в зависимости от тока торможения.
16.Пояснить характер изменения потребляемой мощности в зависимости от увеличения полезной мощности двигателя. 17.Какова зависимость изменения тока якоря при изменении полезной мощности двигателя? 18.Назвать рабочие характеристики двигателя параллельного возбуждения. 19.Чем обеспечивается наклон естественных механических характеристик двигателей большой мощности, имеющих незначительные сопротивления обмоток якоря? ЛАБОРАТОРНАЯ РАБОТА 14 Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 2289; Нарушение авторского права страницы
 при
при  и
и  (21)
(21) (22)
(22) суммарные потери мощности в двигателе;
суммарные потери мощности в двигателе;  мощность, подводимая к двигателю из сети.
мощность, подводимая к двигателю из сети. (23)
(23) - потери холостого хода;
- потери холостого хода;  электрические потери мощности;
электрические потери мощности;  добавочные потери.
добавочные потери. (24)
(24)
 -(3…8)% от номинальной мощности электрического двигателя[1, 4, 5, 12]. Электрические потери
-(3…8)% от номинальной мощности электрического двигателя[1, 4, 5, 12]. Электрические потери  представляют собой сумму следующих составляющих:
представляют собой сумму следующих составляющих:  (25)
(25) - потери мощности в цепи обмотки якоря;
- потери мощности в цепи обмотки якоря;  (26)
(26)

 (29)
(29) (30)
(30) (31)
(31) (32)
(32)