
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Законы управления. Типовые регуляторы
Закон управления - это алгоритм или функциональная зависимость, в соответствии с которыми регулятор формирует управляющее воздействие u(t). Эта зависимость может быть представлена в виде
u(t) = F(x, g, f), (8.1)
где F - некоторый оператор от отклонения x, задающего воздействия g и возмущающего воздействия f, а также от их производных и интегралов по времени. Обычно выражение (8.1) может быть записано следующим образом: u(t) = F1(x) + F2(g) + F3(f). (8.2)
Здесь первое слагаемое соответствует управлению по отклонению, второе и третье - управлению по внешнему воздействию. В зависимости от вида оператора F законы управления делятся на стандартные и специальные. Стандартные законы управления - это универсальные законы, с помощью которых можно решать задачи автоматизации разнообразных технологических процессов и объектов. Специальные законы управления - это законы, формируемые для решения конкретных задач. Если для формирования управляющего воздействия u(t) используются только линейные математические операции, то такой закон управления называется линейным, в противном случае - нелинейным. Линейный стандартный закон управления имеет следующий вид:
где первое слагаемое является пропорциональной, второе - интегральной, третье - дифференциальной составляющими закона, а коэффициенты kП, kИ и kД определяют вклад каждой из составляющих в формируемое управляющее воздействие. Интегральная составляющая закона управления вводится для повышения точности, а дифференциальная - для повышения быстродействия работы системы. Регулятор, формирующий управляющее воздействие в соответствии с (8.3), имеет передаточную функцию
Структурная схема линейного стандартного регулятора приведена на рис.8.1. Настройка такого регулятора заключается в задании значений коэффициентов kП, kИ, kД таким образом, чтобы удовлетворить требованиям качества управления в соответствии с выбранными критериями качества.
Рис. 8.1. Структура линейного стандартного регулятора
На практике широкое распространение получили типовые или промышленные регуляторы, представляющие собой универсальные автоматические устройства, легко приспосабливаемые для автоматизации разнообразных технологических процессов и объектов. При этом объект управления, как правило, является звеном статического типа, т.е. WОУ(0)=kОУ, где kОУ - коэффициент передачи объекта управления. Типовые регуляторы реализуют типовые законы управления, являющиеся частными случаями линейного стандартного закона управления, и классифицируются следующим образом. П-регуляторы. Реализуют П-закон или пропорциональный закон управления u(t) = kП x(t).
Передаточная функция П-регулятора
WR(s) = kП.
Пропорциональное управление позволяет уменьшить установившуюся ошибку в объекте в (1+k) раз, где k = kП´ kОУ - коэффициент передачи разомкнутой системы. Регулирование в этом случае получается статическим, так как при любом конечном значении коэффициента передачи разомкнутой системы установившаяся ошибка будет отличной от нуля. И-регуляторы. Реализуют И-закон или интегральный закон управления u(t) = Передаточная функция И-регулятора
При интегральном управлении получается система, астатическая по отношению к задающему воздействию. Повышение степени астатизма приводит к увеличению установившейся точности системы, но одновременно снижает ее быстродействие, а также приводит к ухудшению устойчивости. Снижение быстродействия объясняется тем, что в первый момент времени при появлении ошибки управляющее воздействие равняется нулю и только затем начинается его рост. В системе пропорционального управления рост управляющего воздействия в первые моменты времени происходит более интенсивно, так как наличие ошибки сразу дает появление управляющего воздействия, в то время как в системе интегрального управления должно пройти некоторое время. ПИ-регуляторы. Реализуют ПИ-закон или пропорционально-интегральный закон управления u(t) = kП x(t) + Передаточная функция ПИ-регулятора
где TИ = kП/ kИ. Пропорционально-интегральное (изодромное) управление сочетает в себе высокую точность интегрального управления (астатизм) с большим быстродействием пропорционального управления. В первые моменты времени при появлении ошибки система с ПИ-регулятором работает как система пропорционального регулирования, а в дальнейшем начинает работать как система интегрального управления. ПД-регуляторы. Реализуют ПД-закон или пропорционально-диф-ференциальный закон управления
Передаточная функция ПД-регулятора
где TД = kД/ kП. Пропорционально-дифференциальное управление применяются для повышения быстродействия работы системы. Регулирование по производной не имеет самостоятельного значения, так как в установившемся состоянии производная от ошибки равна нулю и управление прекращается. Однако она играет большую роль в переходных процессах, потому что позволяет учитывать тенденцию к росту или уменьшению ошибки. В результате увеличивается скорость реакции системы, повышается быстродействие, снижается ошибка в динамике. ПИД-регуляторы. Реализуют ПИД-закон или пропорционально-интегрально-дифференциальный закон управления, соответствующий линейному стандартному закону вида (8.3). ПИД-регулятор, представляющий собой астатический изодромный регулятор с предвидением, обеспечивает повышенную точность и повышенное быстродействие системы. В общем случае закон управления может иметь сложный вид.
Корректирующие устройства Основная задача корректирующих устройств состоит в улучшении точности системы и качества переходных процессов. Однако наряду с этим путем дополнительного введения в систему корректирующих устройств решается более общая задача - обеспечение устойчивости системы, если она была неустойчивой, а затем и желаемого качества процесса управления. Различают три вида основных корректирующих устройств. Последовательные корректирующие устройства. Они вводятся в цепь регулятора последовательно с другими звеньями. На рис.8.2 представлена структурная схема системы с последовательным корректирующим устройством.
Рис. 8.2. Структурная схема системы с последовательным корректирующим устройством
Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора, WПКУ(s) - передаточная функция последовательного корректирующего звена, WОУ(s) - передаточная функция объекта управления. Передаточная функция регулятора с последовательным корректирующим устройством WR1(s) = W1(s) W2(s) WПКУ(s). (8.5)
Способ коррекции с помощью последовательного корректирующего устройства не требует сложных расчетов и прост в практическом исполнении. Поэтому он нашел широкое применение, особенно при коррекции систем, в которых используется электрический сигнал в виде напряжения постоянного тока, величина которого функционально связана с сигналом рассогласования. Однако, последовательные корректирующие устройства не ослабляют влияния изменений параметров элементом системы на ее показатели качества. Поэтому последовательные корректирующие устройства рекомендуется применять в системах, в которых элементы имеют достаточно стабильные параметры. Параллельные корректирующие устройства. Они вводятся в цепь регулятора параллельно с другими звеньями. На рис.8.3 представлена структурная схема системы с параллельным корректирующим устройством.
Рис.8.3. Структурная схема системы с параллельным корректирующим устройством
Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора, Wê ê КУ(s) - передаточная функция параллельного корректирующего звена, WОУ(s) - передаточная функция объекта управления. Передаточная функция регулятора с параллельным корректирующим устройством WR2(s)=W1(s)[W2(s)+Wê ê КУ(s)]. (8.6)
Коррекция систем управления с помощью параллельного корректирующего устройства эффективна, когда требуется формировать сложные законы управления с введением производных и интегралов от сигнала ошибки. Примером этому могут служить рассмотренные ранее типовые регуляторы. Обратные связи. Они вводятся в цепь регулятора и охватывают какие-либо его звенья. Как отмечалось в разделе 3.3, обратные связи могут быть положительными (ПОС) и отрицательными (ООС), кроме того - жесткими и гибкими. На рис.8.4 представлена структурная схема системы с корректирующей обратной связью. Здесь W1(s), W2(s) представляют собой передаточные функции заданных частей регулятора, WОС(s) - передаточная функция корректирующей обратной связи, WОУ(s) - передаточная функция объекта управления.
Рис.8.4. Структурная схема системы с корректирующей обратной связью
Передаточная функция регулятора с корректирующей обратной связью
где знак “+” соответствует ООС, знак “-” - ПОС. Коррекция местной обратной связью используется в системах автоматического управления наиболее часто. Корректирующая обратная связь образует в системе внутренний контур помимо контура, образуемого главной обратной связью. В подавляющем большинстве случаев используются отрицательные корректирующие обратные связи, однако могут применяться также и положительные обратные связи, например в комбинированных системах с компенсацией динамических ошибок. Отрицательная корректирующая обратная связь позволяет существенно ослаблять влияние изменения параметров элементов и их нелинейностей, входящих в местный контур. Поэтому местной обратной связью желательно охватывать те элементы корректируемой системы, которые в процессе работы могут изменять свои параметры и имеют высокие значения коэффициентов передачи. Основными видами корректирующих обратных связей являются: а) жесткая обратная связь WОС(s) = kОС; б) инерционная жесткая обратная связь WОС(s) = в) гибкая обратная связь WОС(s) = kОС s; г) инерционная гибкая обратная связь WОС(s) = Возможны и более сложные передаточные функции корректирующих обратных связей. В динамическом отношении обратные связи оказывают самое различное действие. Проиллюстрируем на примерах основные свойства обратных связей WОС(s) при охвате ими различных типов звеньев WОХВ(s) (рис.8.5).
Рис. 8.5. Структурная схема обратной связи
Жесткая обратная связь WОС(s) = kОС. 1. Охватывает безынерционное звено WОХВ(s)=k. Тогда эквивалентная передаточная функция будет
где kЭ - эквивалентный коэффициент передачи. При ООС kЭ< k; при ПОС kЭ> k. Если при ПОС kkОС=1, то kЭ®¥ , такой элемент представляет собой реле. Следовательно, положительная обратная связь может служить для увеличения коэффициента передачи. 2. Охватывает апериодическое звено первого порядка
Тогда эквивалентная передаточная функция будет
где kЭ - эквивалентный коэффициент передачи; TЭ - эквивалентная постоянная времени. При ООС Следовательно, отрицательная жесткая обратная связь уменьшает инерционность звена. Тем самым она оказывает стабилизирующее действие и улучшает качество переходного процесса в системе. Уменьшение же коэффициента передачи может быть скомпенсировано за счет других звеньев системы. При ПОС Следовательно, положительная жесткая обратная связь может служить для увеличения коэффициента передачи. Но одновременно с этим увеличивается и постоянная времени, т.е. инерционность звена, а при kkОС> 1 звено становится неустойчивым. 3. Охватывает интегрирующее звено Тогда эквивалентная передаточная функция будет
где kЭ - эквивалентный коэффициент передачи; TЭ - эквивалентная постоянная времени. При ООС Следовательно, под действием отрицательной жесткой обратной связи интегрирующее звено превращается в апериодическое с коэффициентом передачи целиком определяемым обратной связью. Такую связь необходимо использовать в тех случаях, когда требуется понизить степень астатизма, т.е. исключить в системе влияние интегрирующего звена. При ПОС звено теряет устойчивость. Инерционная жесткая обратная связь WОС(s) = При охвате ею безынерционного звена WОХВ(s)=k получаем
где kЭ - эквивалентный коэффициент передачи; TЭ - эквивалентная постоянная времени. При ООС Следовательно, в этом случае безынерционное звено превращается в интегро-дифференцирующее звено. Инерционное запаздывание в обратной связи (в отличие от такового в прямой цепи) целесообразно использовать для улучшения качества переходных процессов, получая эффект, аналогичный введению производной в прямой цепи. Отсюда вытекает и хорошее влияние инерционной жесткой обратной связи на качество переходного процесса в системе в целом. Положительная инерционная жесткая обратная связь обычно не используется. Гибкая обратная связь WОС(s) = kОС s. При охвате ею апериодического звена первого порядка
где kЭ - эквивалентный коэффициент передачи; TЭ - эквивалентная постоянная времени. При ООС kЭ=k и TЭ=T+kkОС, если ПОС, то kЭ=k иTЭ=T-kkОС. Таким образом, гибкая обратная связь изменяет только инерционность звена, причем для ООС эквивалентная постоянная времени увеличивается. Инерционная гибкая обратная связь WОС(s) = При охвате ею интегрирующего звена
где kЭ - эквивалентный коэффициент передачи; TЭ - эквивалентная постоянная времени. При ООС при ПОС Следовательно, охват интегрирующего звена инерционной гибкой обратной связью эквивалентен последовательному включению интегро-дифференцирующего звена. При отрицательной инерционной гибкой обратной связи и большом коэффициенте передачи k интегрирующее звено приближенно становится изодромным. Способ коррекции местной обратной связью позволяет наилучшим образом скорректировать динамические свойства системы по сравнению со способами коррекции с помощью последовательных и параллельных корректирующих устройств. Динамические свойства линейных систем при введении корректирующих устройств различного вида могут быть сделаны одинаковыми. Следовательно, включение любого типа корректирующего устройства может обеспечить требуемое качество работы системы. В этом случае передаточные функции регуляторов с последовательной коррекцией (8.5), параллельной коррекцией (8.6) и местной обратной связью (8.7) должны быть одинаковыми, т.е.
WR1(s) = WR2(s) = WR3(s). (8.8)
Отсюда следует формула перехода от передаточной функции корректирующего устройства одного вида к передаточной функции эквивалентного корректирующего устройства другого вида W2(s)WПКУ(s) = W2(s)+Wê ê КУ(s) = Использование того или иного вида корректирующих устройств, т.е. последовательных звеньев, параллельных звеньев или обратных связей, определяется удобством технической реализации.
Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 2863; Нарушение авторского права страницы
 , (8.3)
, (8.3) . (8.4)
. (8.4)

 .
. .
.
 ,
,  .
. = kП(TДs + 1),
= kП(TДs + 1), 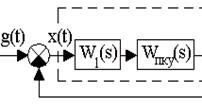





 , (8.7)
, (8.7) ;
;  .
.
 ,
,  .
. ,
,  и
и  .
. и
и  .
. .
. ,
,  и
и  .
. ,
,  .
. ,
,  ,
,  и
и  .
. . (8.9)
. (8.9)