
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Перечислите и дайте понятие основным характеристикам датчиков.Стр 1 из 6Следующая ⇒
Перечислите и дайте понятие основным характеристикам датчиков. Датчик — элемент, преобразующий контролируемый параметр в сигнал, удобный для усиления и передачи на расстояние. Датчики применяются в системах автоматического контроля и автоматического регулирования. Основные характеристик датчиков 1. Статическая характеристика вход—выход показывает зависимость между входной х и выходной у величинами в установившемся режиме у=f(х). Пример линейной статической характеристики приведён на рис.10. 2. Чувствительность датчика (коэффициент усиления, коэффициент передачи) — отношение приращения выходной величины к изменению входной величины, вызвавшему это приращение. Чувствительность представляет собой статической характеристики: S= Δ y/Δ Χ где Δ y —приращение выходной величины; Δ Χ —приращение входной величины
Рис. 10
3. Уровень шумов—значение выходной величины у=у0 при отсутствии входной величины, т.е. при х=0. 4. Разрешающая способность датчика—наименьшее значение входной величины х=х0 на которое он реагирует. Определяется она порогом чувствительности датчика: при всех значениях х> х0 на выходе датчика будет вполне определённая величина у> у0. 5. Входная и выходная мощности датчика — соответственно мощности на его входе и выходе. 6. Инерционность датчика показывает, как быстро он реагирует на изменения входной величины. 7. Стабильность датчика характеризуется временными температурными и другими интервалами, в которых его параметры и характеристики не выходят за допустимые пределы.
Классифицируйте датчики 1. По принципу действия: электроконтактные, реостатные, индуктивные, индукционные, емкостные, фотоэлектрические, термоэлектрические, пьезоэлектрические, пневматические, гидравлические и др. 2. По виду входной величины: датчики напряжения, перемещения, температуры, мощности, числа оборотов и др. 3. По виду преобразования входной величины: а) параметрические датчики, преобразующие величину в изменения какого-либо параметра датчика (сопротивления, емкости, индуктивности и т.д.); б) генераторные датчики, преобразующие входную величину в изменения ЭДС без дополнительного источника энергии. В настоящее время существует множество разнообразных по принципу действия и назначению ИП. Непрерывное развитие науки и технологий приводит к появлению все новых преобразователей. В качестве классификационных признаков ИП можно принять многие характеристики преобразователей: вид функции преобразования, вид входной и выходной величин, принцип действия, конструктивное исполнение и т.д. По виду используемой энергии ИП можно подразделить на электрические, механические, пневматические и гидравлические. По соотношению между входной и выходной величинами различают: ИП неэлектрических величин в неэлектрические (рычаги, редукторы, мембраны, пружины и др.); ИП неэлектрических величин в электрические (потенциометры, термопары, емкостные и индуктивные ИП и др.); ИП электрических величин в электрические; ИП электрических величин в неэлектрические (измерительные механизмы электроизмерительных приборов). В зависимости от вида выходного сигнала различают ИП аналоговые, дискретные, релейные, с естественным или унифицированным выходным сигналом. По виду функции преобразования ИП подразделяются следующим образом: масштабные, изменяющие в определенное число раз входную величину без изменения ее физической природы; функциональные, осуществляющие однозначное функциональное преобразование входной величины с изменением или без изменения ее физической природы; операционные, выполняющие над входной величиной математические операции высшего порядка (дифференцирование или интегрирование по временному параметру). По виду структурной схемы различают ИП прямого однократного преобразования, последовательного прямого преобразования, дифференциальные, с обратной связью (компенсационной схемой). По характеру преобразования входной величины в выходную ИП подразделяются на параметрические, генераторные, частотные' и фазовые, а по виду измеряемой физической величины — на ИП линейных и угловых перемещений, давления, температуры, концентрации вещества и т.д. По динамическим характеристикам ИП подразделяются в соответствии с видом передаточной функции. В зависимости от вида статической характеристики ИП делятся на реверсивные (двухтактные), у которых знак выходного сигнала определяется знаком входного сигнала, и нереверсивные (однотактные), у которых знак выходного сигнала не зависит от знака входного сигнала. Даже столь развернутая классификация по ряду признаков не является исчерпывающей, так как за каждым определением стоит группа преобразователей с разными техническими конструктивными характеристиками.
Рис 13
1. Схема с отводом от средней точки (рис. 14, а) и схема с искусственной средней точкой, создаваемой резисторами R1 и R2 (рис. 14, б), дают возможность получить выходное напряжение различного знака в зависимости от направления перемещения движка. Рис.14
2. Схема с двумя потенциометрами, каждый из которых соединен с отдельным чувствительным элементом, даёт возможность получить выходное напряжение, пропорциональное разности скоростей двух подвижных элементов (рис.15). При синхронном перемещении движков потенциометров Rд1 и RД2 выходное напряжение отсутствует. Оно появляется только в том случае, если скорости не равны, и напряжение будет тем больше, чем больше величина Δ U=U1—U2
3. Мостовая схема включения реостатного датчика (рис. 16) также дает возможность получить разнополярные напряжения. При определенных соотношениях сопротивлений R1, R2 и RЗ потенциалы точек а и б будут равны между собой и выходное напряжение будет отсутствовать. Под действием чувствительного элемента происходит перемещение движка в ту или иную сторону, что ведет к нарушению равенства потенциалов, приводящему к появлению выходного напряжения. Величина этого напряжения зависит от величины перемещения движка, а знак или фаза •— от направления перемещения.
Рис.17 Рис.18 Реостатные и потенциометрические датчики имеют простую конструкцию, работают на постоянном и на переменном токах, имеют высокую точность и стабильность, мало подвержены влиянию помех со стороны электромагнитных полей, имеют малый вес и т. п. Все это определяет их широкое применение в системах автоматики. Недостатки этих датчиков — наличие подвижного контакта, что снижает надежность работы, срок службы датчика, и нелинейность характеристик. Реостатные датчики применяются для передачи показаний измерительных приборов, манометров, измерения уровня жидкости. Потенциометрический датчик (рис. 4.1), являющийся датчиком линейных или угловых перемещений, представляет реостат с подвижным контактом — щеткой, включенной по схеме потенциометра. Перемещение подвижного контакта такого датчика преобразуется в напряжение, снимаемое со щетки и одной клеммы обмотки потенциометра (см. рис. 4.1, а). / Характеристика потенциометра линейна, если сопротивление и ручки значительно больше его сопротивления. Динамические свойства потенциометра также зависят от его и нагрузки; при активной нагрузке он практически безинерционен, При емкостной и индуктивной нагрузках изменение его выходного сигнала будет отставать от изменения входного сигнала, так динамические процессы в электрических цепях с реактивным сопротивлением протекают не мгновенно.
а Рис. 4.1. Потенциометрический датчик: а— электрическая схема; б— вариант конструкции; в — статическая характеристика
Конструкции потенциометра разнообразны. Наиболее распространены потенциометр с каркасом цилиндрической формы (см. рис.4.1. б), которая обеспечивает небольшие его габариты и позволяет снизить усилия, необходимые для перемещения щетки, а цельно, уменьшить зону нечувствительности, что очень важно при измерении малых перемещений. Каркасы потенциометров делают из пластмасс, керамики, оксидированного алюминия, а обмотки— из сплавов с высоким удельным сопротивлением (константана, сплавов платины, золота). Для намотки используется проволока малого диаметра (до сотых долей миллиметра), так как чем меньше диаметр проволоки, тем меньше ступенчатость статической характеристики (см. рис. 4.1, в) Щетки потенциометров изготовляют из сплавов серебра, платины, иридия, палладия и др. Применяются и потенциометры с каркасами другой формы, например, если надо произвести измерения большого линейного перемещения с большой точностью, — прямолинейные, большой длины. Достоинства потенциометрического датчика — простота конструкции и схемы, малые габаритные размеры и масса; недостаток — наличие скользящего контакта, который, во-первых, снижает надежность, а во-вторых, ограничивает срок его эксплуатации, так как со временем происходит истирание проволоки и характеристика потенциометра меняется.
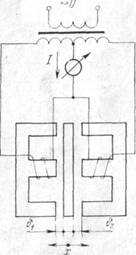
Рис.21 Индуктивные датчики применяются для измерения механических перемещений, обычно в пределах 0, 01—50 мм. Их работа основана на свойстве катушки индуктивности изменять свое реактивное сопротивление при введении в нее ферромагнитного сердечника или при изменении зазора в сердечнике, на котором помещена эта катушка. Индуктивные датчики включаются по однотактной и двухтактной схемах. В однотактной схеме (рис. 21) перемещение якоря вызывает изменение индуктивности обмотки и тока в цепи, т.е. L=f(б).
Рис.22
Рис.23 Статическая характеристика (вход—выход) такого индуктивного датчика имеет относительно небольшой линейный участок (рис. 22). При больших величинах зазора изменения индуктивности будут незначительными. Дифференциальный индуктивный датчик (рис. 23) более чувствителен, чем простой, так как при отклонении якоря от среднего положения происходит противоположное изменение индуктивности двух катушек. Например, если якорь переместится вправо, то зазор δ 2 уменьшится, а зазор δ 1 увеличится. Поэтому индуктивное сопротивление правой катушки станет больше, а левой — наоборот. В свою очередь, это приведёт к значительному изменению тока через измерительный прибор. Достоинством индуктивных датчиков являются их простота и надежность, а также отсутствие скользящих деталей. Основные недостатки: сравнительно малая чувствительность, зависимость индуктивного сопротивления от частоты изменения переменного тока, небольшой линейный участок статической характеристики.
Рис.26
Рис.29 Емкостные датчики обладают рядом достоинств. Они характеризуются высокой чувствительностью, простотой устройства, небольшими габаритами и весом, малой инерционностью, незначительными усилиями электрического взаимодействия между обкладками датчика. Однако они имеют весьма большое внутреннее сопротивление, поэтому являются маломощными. Для питания датчиков может использоваться только высокочастотное напряжение, так как только в этом случае реализуется их высокая чувствительность и обеспечивается стабильная работа. К недостаткам емкостных датчиков следует отнести сильное влияние на их работу паразитных емкостей и посторонних электрических полей, изменений температуры и влажности окружающей среды.
Рис.34
Действие фотоэлектрического датчика основано на преобразовании изменения светового потока в изменение электрических параметров фотоэлемента. Фотоэлементы — это особый вид полупроводников или электронных приборов (газонаполненные элементы). Для измерения перемещений обычно используются фоторезисторы, меняющие свое внутреннее сопротивление при изменении освещения, и фотодиоды, которые при изменении освещения меняют свои вентильные свойства. Схема фотоэлектрического датчика представлена на рис. 4.5.
Работают фотоэлектрические датчики следующим образом. Измеряемое перемещение вызывает перекрытие светового потока, освещающего фотоэлемент. Изменение электрических параметров воспринимается электрической схемой, обычно усилителем. Эти датчики широко применяются в промышленности не только для измерения перемещений, но и для контроля чистоты поверхности, наличия дефектов поверхности, счета деталей на конвейерах и т. п. Существует группа фотоэлектрических импульсных датчиков, которые работают в комплексе со счетными устройствами. Такой комплекс позволяет измерять большие перемещения (как угловые, так и линейные) с высокой точностью. Высокая (в сравнении с другими видами датчиков) точность достигается за счет увеличения масштаба измеряемого перемещения при его учете. Примером может служить муаровый растровый датчик, представляющий собой комбинацию двух растров — подвижного и неподвижного (рис. 4.6). Растры — это решетки из прозрачных и непрозрачных полос, форма которых может быть различной. На рис. 4.6, а, б представлены радиальные центральный и нецентральный растры, сопряжение которых применяется при измерении угловых перемещений, а на рис. 4.6, в, г — растровые решетки, сопряжение которых используется при измерении линейных перемещений. Растровое сопряжение устанавливается на пути светового потока таким образом, чтобы он проходил перпендикулярно к обеим растрам.
Рис. 4.6. Растры муаровых датчиков: а, б — соответственно подвижный и неподвижный для измерения угловых перемещений; в, г — соответственно подвижный и неподвижный для измерения линейных перемещений
Рис.36
Полупроводниковые терморезисторы с отрицательным температурным коэффициентом называются термисторами, с положительным — позисторами. Полупроводниковые терморезисторы представляют собой смеси окислов некоторых металлов, спрессованные и спеченные при высокой температуре. В зависимости от материала различают медно-марганцовые (ММТ) и кобальтово-марганцевые (КМТ) терморезисторы. Терморезисторы, используемые в качестве датчиков, могут применяться в двух режимах: 1) температура терморезистора определяется температурой окружающей среды; 2) терморезистор нагревается проходящим по нему большим током, а его температура зависит от изменяющихся условий охлаждения. В.первом случае терморезистор используется в качестве датчика температуры или термометра сопротивления. Ток, протекающий по терморезистору, должен быть настолько мал, чтобы он не вызывал ощутимого нагрева терморезистора. В этом случае могут применяться как полупроводниковые терморезисторы, так и металлические, выполненные из проволоки диаметром 0, 1 мм, намотанные на слюдяной, фарфоровый или кварцевый каркас. Полупроводниковый терморезистор обладает меньшей стабильностью, но он более чувствителен, чем металлический, и позволяет обнаружить отклонения на сотые и тысячные доли градуса. Во втором случае терморезистор используется в качестве датчика для измерения неэлектрических величин, тем или иным способом изменяющих отвод тепла от терморезистора. Например, так может быть изготовлен анемометр — устройство, измеряющее и контролирующее скорость потока газа. Термоанемометр (рис. 37) представляет собой тонкую нить, припаянную к стойкам и нагреваемую током. Исследуемый газовый поток обдувает нить, поэтому се температура 'И сопротивление зависят от скорости потока газа; происходит преобразование скорости потока в электрическое сопротивление датчика.
Рис.37
Принцип действия термовакуометров, измеряющих степень вакуума или давление в баллонах, основан на уменьшении теплопроводности газа при уменьшении давления. В баллоне, где измеряется давление, помещается тонкая платиновая нить, нагреваемая током. При уменьшении давления в баллоне уменьшается теплопроводность газа, ухудшается теплоотдача, что приводит к увеличению сопротивления нити и тока в ее цепи. Таким образом, степень вакуума в баллоне преобразуется в электрическую величину — изменение сопротивления или тока. Терморезисторы, используемые в качестве датчиков, могут включаться по простой однотактной, дифференциальной и мостовой схемам. Примером мостовой схемы включения терморезистора может быть устройство для измерения мощности теплового излучения (рис. 38). Терморезистор R1 поглощает часть мощности, в результате его сопротивление изменяется. При этом мост будет разбалансирован, а возникшее выходное напряжение, поступающее на вход усилителя, будет зависеть от мощности излучения.
Электроконтактный термометр представляет собой обычный ртутный термометр, в капилляр которого впаяны два тонких проводника (рис. 39). При заданной температуре ртуть, поднявшаяся по капилляру, замыкает контакты проводников и включает электрическую цепь. Такие термометры применяются для работы при небольших температурах.
Рис.39
Электроконтактные термометры типа ЭКТ-1 и ЭКТ-2 применяются в системах автоматического регулирования температуры растворов при обработке киноплёнки. Задающие элементы. Задающие устройства или задатчики — элементы автоматических систем, используемые для установки заданного значения регулируемой величины или требуемого закона изменения этой величины. В зависимости от природы вырабатываемого сигнала различают электрические и механические задающие устройства. Кроме того, различают задающие устройства для обеспечения постоянного по величине значения регулируемого параметра и программные задающие устройства для задания программ изменения этого параметра. Задающие устройства должны обладать определенной точностью и стабильностью, так как от этого в значительной степени зависит качество работы системы автоматического регулирования. Для задания постоянных значений регулируемого параметра применяются стабилизаторы различных видов. В кинотехники часто используются стабилизаторы на кремневом стабилитроне и феррорезонансные стабилизаторы напряжения. В параметрическом стабилизаторе напряжения кремниевый стабилитрон включается через балластный резистор Rб (рис. 40), который вместе со стабилитроном образует делитель напряжения. При изменении, например, входного напряжения изменится ток в цепи резистора и стабилитрона, однако, напряжение на стабилитроне остается прежним, а всё изменения напряжения будут происходить на резисторе Rб.
Рис.40. В процессе эксплуатации стабилизаторов на кремниевых стабилитронах нельзя допускать увеличение входного напряжения больше установленной величины. В этом случае обратный ток через стабилитрон увеличивается настолько, что пробой р-п перехода становится необратимым. Сравнивающие элементы осуществляют сравнение заданного и действительного значений параметра регулирования и выделяют сигнал ошибки. В ряде систем датчик, задающее устройство и сравнивающий элемент выполнены одним узлом, который называется измерительным элементом. В качестве сравнивающих и измерительных элементов могут применяться мостовые схемы включения сопротивлений, дифференциальные, балансные и другие схемы. Термопары Термопара (рис. 4.14) является генераторным датчиком. Действие термопары основано на том, что в цепи, составленной из двух или более металлических проводников из различных материалов, при неодинаковой температуре точек их соединения (спаев) возникает термоЭДС, величина, которой зависит от разности этих температур (явление Томсона). Для статического режима Emax=K(t1-t2) где К — коэффициент, зависящий от материалов, из которых изготовлена термопара. Горячий спай термопары помещается в среду, температуру которой надо измерить, при этом холодный спай находится в среде с комнатной температурой (желательно, чтобы она поддерживалась постоянной).
Рис. 4.14. Схема включения термапары
Мощность выходного сигнала термопар очень мала; увеличить ее можно посредством увеличения массы спая, но при этом увеличится и инерционность датчика, что нежелательно, поэтому термопары, как правило, работают с усилителями. Стандартные термопары и их рабочие диапазоны, °С: Хромель — копель.......................................................... до 600 Сплавы никель— кобальт и кремний — алюминий... от 300 до 1000 Хромель— алюмель....................................................... до 1300 Платинородий — платина............................................. от 1000 до 1600 Платинородий— платинородий................................... от 1000 до 1800
Рис. 41. При подаче на вход лампы Л1 постоянного или медленно изменяющегося напряжения будет изменяться анодный ток лампы в соответствии с динамической характеристикой усилительного каскада, так как при этом происходит изменение падения напряжения на резисторе Rа1, то напряжение на сетке второй лампы также будет изменяться, что вызывает изменение анодного тока Л2 и т. д. В данной схеме питание всех каскадов осуществляется от одного источника, поэтому будет сказываться влияние обратных связей через общий источник питания. В связи с этим внутреннее сопротивление источника питания должно быть небольшим. Преимущество схемы в том, что даже при значительном количестве каскадов напряжение источника питания остается небольшим.
Рис. 46. Управляемые вентили — тиристоры, симисторы представляют собой многослойную структуру, состоящую из ряда р-п переходов. Используются в стабилизаторах тока и напряжения, в качестве элементов динамических рекламных устройств. Момент включения тиристора зависит не только от напряжения между анодом и катодом, но и от напряжения на управляющем электроде. Управляемый вентиль в схемах выпрямления вступает в работу в те моменты времени, когда напряжение на аноде становится больше, чем на катоде. Отпирание тиристоров определяется моментом подачи управляющих импульсов на управляющие электроды или углом включения тиристора. Принцип автоматического регулирования и стабилизации токов, дуговых и ксеноновых ламп, где в качестве исполнительных элементов применяются тиристоры, основан на зависимости величины угла отпирания а от величины тока нагрузки (рис. 47). В режиме холостого хода угол отпирания — минимальный. В режиме короткого замыкания для ограничения тока угол отпирания увеличивается, в результате чего напряжение на выходе выпрямителя падает, и ток короткого замыкания практически не превышает номинального значения тока.
Рис. 47 Преимущество тиристоров по отношению к другим исполнительным элементам такого типа в том, что они имеют малые потери мощности, малые вес, габариты и стоимость.
Рис. 7.3. Временная диаграмма работы реле
Участок АВ необходим для того, чтобы обеспечить надежное притяжение якоря к сердечнику, исключающее вибрацию якоря при сотрясениях реле. Впоследствии ток в обмотке реле остается неизменным. Отношение установившегося тока Iуст к току срабатывания Iср называется коэффициентом запаса реле по срабатыванию (т.е. коэффициентом, определяющим надежность работы реле): Кзап = Iуст/Iср= 1, 5... 2. При этом установившийся ток Iуст не должен превышать значения, допустимого для обмотки реле по условиям её нагрева. Этап III — отпускание реле. Этот период начинается от момента прекращения момента подачи сигнала (точка С) и продолжается до момента, когда ток в обмотке реле уменьшится до значения Iот (точка О — прекращение воздействия реле на управляемую цепь). При этом различают время трогания при отпускании tтр и время движения tдв. Время отпускания tот = tтр + tдв, где tтр — время до начала движения якоря; tдв — продолжительность перемещения якоря. Отношение тока опускания к току срабатывания называется коэффициентом возврата: Кв = Iот/tср < 1; обычно Кв = 0, 4...0, 8. Этап IV — покой реле. Это период от момента размыкания контактов реле (точка О) до момента поступления нового сигнала на его обмотку. При быстром следовании управляющих сигналов друг за другом работа реле характеризуется максимальной частотой срабатывания (числом срабатываний реле в единицу времени).
Универсальные ОУ На рис. 6.9, а приведена базовая схема двухкаскадного универсального ОУ, содержащая входной дифференциальный усилитель па транзисторах VТ1...VТ4 и второй каскад усиления с общим эмиттером — транзисторы VТ5 и VТ6. На выходе схемы включен двухтактный усилитель мощности — эмиттерный повторитель. Второй каскад усиления работает как интегратор на высоких частотах, поскольку на инвертирующем входе (базе VТ5) включен конденсатор коррекции с емкостью С= 30 пФ. Работу входного дифференциального каскада можно проиллюстрировать диаграммой распределения токов усилителя КР140УД7, показанной на рис. 6.9, б. При равенстве входных напряжений токи эммиттеров транзисторов VТ1 и VТ2 равны току I1, поэтому одинаковы и токи эмиттеров транзисторов VТЗ и VТ4.
Рис. 6.9. Базовая схема (а) и диаграмма распределения токов (б) универсального ОУ При этом полагают, что базовые токи транзисторов пренебрежимо малы. При идентичности технологических параметров токи транзисторов VТ4 и VТЗ всегда будут равны. Такое включение транзисторов называют «зеркалом токов». Потенциал точки В (см. рис. 6.9, а) — выхода дифференциального усилителя равен примерно. 2Uб_э. Когда появляется напряжение между входами ОУ, токи эмиттеров транзисторов VТ1 и VТ2 изменяются на значение ±Uвх/(2 х2б) мВ. Допустим, что ток транзистора VТ1 получил приращение ∆ I = Uвх(2 х26) мВ. Тогда ток транзистора VТ2 должен уменьшиться на такую же величину, поскольку оба эти транзистора питаются от генератора стабильного тока. Нагрузка «зеркало токов» удваивает изменение тока на выходе первого каскада. Действительно, в точку В поступает ток ∆ I вых1, = -2∆ I, поскольку второе приращение ∆ I есть отклик коллекторной цепи транзистора VТ4 на изменение его базового напряжения, которое, в свою очередь, вызвано приращением тока транзистора VТЗ на величину ∆ I. Далее сигнал усиливается вторым каскадом на транзисторах VТ5 и УТ6 поступает на усилитель мощности, построенный на транзисторах VТ7 и VТЗ. Токи I1 и I2 каскадов ОУ стабилизируются различными по конфигурации схемами внутренней стабилизации.
Перечислите и дайте понятие основным характеристикам датчиков. Датчик — элемент, преобразующий контролируемый параметр в сигнал, удобный для усиления и передачи на расстояние. Датчики применяются в системах автоматического контроля и автоматического регулирования. Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 4559; Нарушение авторского права страницы


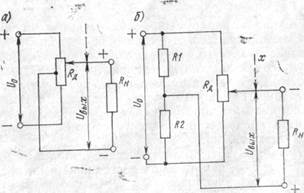
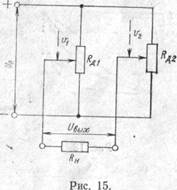
 Рис16
Рис16 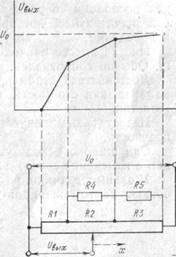 С помощью потенциометрических датчиков можно выполнять операции сложения и умножения нескольких напряжений, .получать различные функциональные зависимости между перемещением движка потенциометра и выходным напряжением. Это достигается применением специальных профилей каркасов (рис. 17), шунтированием отдельных участков намотки постоянным сопротивлением (рис. 18), намоткой потенциометра проводом переменного сечения, неравномерным перемещением движка.
С помощью потенциометрических датчиков можно выполнять операции сложения и умножения нескольких напряжений, .получать различные функциональные зависимости между перемещением движка потенциометра и выходным напряжением. Это достигается применением специальных профилей каркасов (рис. 17), шунтированием отдельных участков намотки постоянным сопротивлением (рис. 18), намоткой потенциометра проводом переменного сечения, неравномерным перемещением движка.
 Чувствительность потенциометрических датчиков при измерении перемещений составляет 3...5 В/мм.
Чувствительность потенциометрических датчиков при измерении перемещений составляет 3...5 В/мм.

 В автоматических устройствах фотодатчики могут реагировать на появление и исчезновение предметов (рис. 35, а), на величину освещенной поверхности (рис. 35, б), на силу светового потока (рис. 35, в), на количество световых импульсов (рис. 35, г) и др.
В автоматических устройствах фотодатчики могут реагировать на появление и исчезновение предметов (рис. 35, а), на величину освещенной поверхности (рис. 35, б), на силу светового потока (рис. 35, в), на количество световых импульсов (рис. 35, г) и др. Рис. 4.5. Схема фотоэлектрического датчика релейного типа: 1 — осветитель; 2 — перемещающийся элемент; 3 — диафрагма; 4 — фотоэлемент; 5 — усилитель; 6 — выходное реле
Рис. 4.5. Схема фотоэлектрического датчика релейного типа: 1 — осветитель; 2 — перемещающийся элемент; 3 — диафрагма; 4 — фотоэлемент; 5 — усилитель; 6 — выходное реле При перемещении подвижного растра относительно неподвижного образуются комбинационные муаровые полосы, движущиеся перпендикулярно к измеряемому перемещению. Эти полосы пересекают световой поток, модулируют его, и фотодатчик формирует импульсы. Выходной сигнал измерительной схемы имеет цифровую форму — это число импульсов, учтенных счётчиком.
При перемещении подвижного растра относительно неподвижного образуются комбинационные муаровые полосы, движущиеся перпендикулярно к измеряемому перемещению. Эти полосы пересекают световой поток, модулируют его, и фотодатчик формирует импульсы. Выходной сигнал измерительной схемы имеет цифровую форму — это число импульсов, учтенных счётчиком.
 Рис.38
Рис.38 



