
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА С ЭЛЕКТРОДВИГАТЕЛЯМИ
Исполнительный механизм — одно из последних звеньев в системе автоматического регулирования. Он предназначен для перемещения регулирующего органа в соответствии с управляющим сигналом. Мощности управляющего сигнала обычно недостаточно для непосредственного перемещения регулирующего органа, поэтому исполнительный механизм усиливает управляющий сигнал по мощности за счет внешнего источника энергии. Регулирующим органом называют звено исполнительного устройства, которое представляет собой переменное гидравлическое сопротивление и воздействует на расход среды благодаря изменению своего проходного сечения. С этой целью применяют регулирующие дросселирующие органы — плунжеры, поворотные заслонки, шиберы, шланговые и диафрагменные дросселирующие органы.
Регулирующий орган непосредственно воздействует на объект управления. Для пропорционального и позиционного регулирования в качестве регулирующих органов широко применяют заслонки, задвижки, клапаны и др. В следящих системах исполнительный механизм воздействует непосредственно на объект. Таким образом, исполнительный механизм, преобразуя управляющий сигнал, перемещает орган управления. Исполнительные элементы должны отвечать заданным техническим условиям, а именно: виду применяемой энергии, значениям и характеру требуемого усилия, мощности, моменту, допускаемой инерционности, желаемым габаритам и массе, надежности, рабочим характеристикам. Исполнительные механизмы классифицируют по следующим признакам: перемещение регулирующего органа — прямоходные, поворотные; вид потребляемой энергии — гидравлические, пневматические, электрические, комбинированные (электрогидравлические, электропневматические); конструктивное исполнение — электрические (с приводами: от электродвигателя, от электромагнита, от электромагнитных муфт), гидравлические (с приводами: поршневым, плунжерным, от гидродвигателя), пневматическое (с приводами: поршневым, плунжерным, диафрагменным, от пневмодвигателя). Регулирующие органы оцениваются конструктивной и расходной характеристиками. Регулирующие органы для сыпучих материалов строят на базе шнековых, дисковых, ленточных, лопастных, скребковых и других питателей. Исполнительные механизмы с электродвигателями постоянного тока. Конструктивно их выполняют с вращательным движением выходного вала, реже — с поступательным перемещением выходного штока. В однооборотных исполнительных механизмах с углом поворота выходного вала 120—270° используют такие регулирующие органы, как заслонки, упоры, краны, шиберы. Многооборотные устройства используют для привода запорных вентилей, дросселей, задвижек, шнеков, лопастных, скребковых питателей. У постоянно вращающихся исполнительных механизмов крутящий момент от вала электродвигателя передается к регулирующему органу через редукторы, электромагнитные муфты и другие преобразователи. Мощность электродвигателя исполнительного механизма для перемещения регулирующего органа с требуемой скоростью и ускорением определится как где Рдв — требуемая мощность; Мст — статический момент; Принимая
Продифференцировав выражение (4) по i и приравняв нулю, определим оптимальное передаточное отношение редуктора, при котором требуется минимальный момент на валу электродвигателя для получения заданного ускорения нагрузки В уравнениях динамики электродвигателей постоянного тока для малых отклонений переменных за выходную величину принимаем изменение угловой скорости двигателя Воздействия, вызывающие переходный процесс, могут осуществлять преобразователи путем изменения напряжения на якоре
Подставив iP0 из формулы (5) в (3), получим
По данному расчетному значению выбирается электродвигатель где Мдв. ном — номинальный момент электродвигателя по паспортным данным; Выбранный электродвигатель проверяют по моменту и скорости Мдв. ном Электродвигатели постоянного тока целесообразно применять для объектов с толчкообразной нагрузкой и если требуется широкий диапазон плавного регулирования скорости. Достаточно высокое быстродействие и КПД двигателей обусловили их широкое применение с комплектными тиристорными преобразователями в системах регулирования подачи шпалорезных установок, лесопильных рам, различных деревообрабатывающих станков.
Регулирование скорости двигателей происходит за счет изменения приложенного к якорю напряжения или изменения напряжения подводимого к обмотке возбуждения. Возможно совместное регулирование, которое называют двухзонным. Уравнения семейства механических характеристик
где
Уравнение цепи возбуждения: где Тм — IKм — электромеханическая постоянная времени; Км= =
Перейдя к изображениям, уравнение (8) можно записать
где W1 (р), W2 (р) — передаточные функции двигателя по управляющим воздействиям по цепи якоря и по цепи возбуждения; Wf (p) — передаточная функция двигателя по возмущающему воздействию по нагрузке. Структурные схемы для этих воздействий представлены на рис. 30, в. Исполнительные механизмы с двигателями переменного тока. Двухфазные двигатели применяются в однооборотных исполнительных механизмах ДР, ПР, ИМ, ИМТ, КДУ и др. Они выпускаются с полым немагнитным и ферромагнитным коротко-замкнутым роторами. Принципиальная схема включения представлена на рис. 31, а. ИП — источник питания, оси обмотки управления ОУ и обмотки возбуждения ОВ смещены на 90°, что обеспечивается конденсатором С. Механические характеристики двухфазного двигателя (рис. 31, б) определяются экспериментально. Параметры емкости С указаны в технических данных двигателя. Механические характеристики
где двигателя соответственно по управляющему воздействию и по моменту. Используя уравнение движения где ТM = IKД.М— электромеханическая постоянная времени двигателя. Асинхронные трехфазные электродвигатели используют в качестве постоянно вращающихся исполнительных ме-
и не учитывая инерционности цепи управления ввиду ее малости, запишем дифференциальное уравнение двигателя
Рис. 31. Двигатели переменного тока: a — принципиальная схема включения двухфазного двигателя; б — его механические характеристики; в — принципиальная схема асинхронного трехфазного электродвигателя; г — его механические характеристики при измерении сопротивления в цепи ротора; д — характеристики электродвигателя при изменении частоты питающего напряжения; е — исполнительный механизм с двигателем переменного тока ханизмов. Управление этими двигателями осуществляется путем использования добавочных сопротивлений в цепи ротора, изменением подводимого к статору напряжения или совместным изменением частоты и напряжения питания (рис. 31, в). Для первого случая регулирования механические характеристики описывают упрощенным уравнением
где МКр — критический момент; S = ( Приведенное полное активное сопротивление ротора R2e = R'2 при отсутствии дополнительного сопротивления. Рассматривая R'2 как параметр управления, можно построить семейство механических характеристик (рис. 31, г) и учитывая, что
Без учета электромагнитных процессов дифференциальное уравнение двигателя
При частотном управлении (рис. 31, д) управляющим воздействием является частота питающего напряжения /, которой соответствует синхронная скорость Упрощенно динамика процессов описывается уравнением равновесия моментов (6) и зависимостью (10) момента двигателя М от скольжения S, если двигатель работает на спрямленном участке механической характеристики с нагрузкой от М = 0 до М = = 1, 2 Мн. При этом
где Tф. э = 1/(
Переходя к приращениям в окрестности точки А и полагая, что Агрегатные унифицированные исполнительные механизмы. При решении задач автоматизации технологических процессов экономически выгодно использовать универсальные регуляторы общепромышленного назначения вместо создания специализированных устройств. Универсальные регуляторы и исполнительные механизмы изготовляют по нормам Государственной системы приборов (ГСП) для создания необходимых воздействий на объект. Унификация входных и выходных сигналов позволяет сопряжение устройств при создании агрегатных комплексов с широкими функциональными возможностями. Агрегатные исполнительные механизмы могут выполнять как простые операции (открыть—закрыть), так и более сложные (многоступенчатое и пропорциональное перемещение). С приводом от асинхронных электродвигателей отечественная промышленность выпускает механизмы с постоянной скоростью, различаемые по числу оборотов выходного вала — однооборот-ные и многооборотные. Однооборотными называют механизмы, у которых рабочий угол поворота выходного вала не превышает 360°, а чаще не более 180°. Наиболее распространены однооборотные исполнительные механизмы ДР, ПР, ИМ, ИМГ, КДУ, МЭК и др. У многооборотных исполнительных механизмов выходной вал за цикл управления делает несколько оборотов. Применяют их обычно для управления задвижками и вентилями, требующими плотной затяжки. Механизм ДР предназначен для двухпозиционного регулирования и имеет две модификации: с реверсивно поворачивающимся (на угол до 180°) выходным валом и поступательно перемещающимся штоком (ход 19 мм). Асинхронный электродвигатель через редуктор приводит в движение вал, соединенный с рабочим органом, наличие блокировочных устройств позволяет через каждые 180° поворота вала отключать электродвигатель, что дает возможность открывать или закрывать рабочий орган регулятора.
Механизм ПР отличается от ДР наличием двух приводных двигателей с общим валом, но вращающихся в противоположные стороны. На выходном валу механизмов типа ПР установлены конечные выключатели, ограничивающие угол поворота вала, и реостат, который может быть использован для дистанционного контроля или обратной связи. Механизм ПР предназначен для статического регулирования. Механизм ИМ (рис. 31, е) — устройство, также предназначенное для статического регулирования. Механизм типа ИМ-2/120 приводится от двухфазного реверсивного конденсаторного двигателя через редуктор. Изменение направления вращения достигается переключением конденсатора С из цепи обмотки W1 в цепь обмотки W2. Эти механизмы снабжены реостатом обратной связи R3 и штурвалом ручной настройки RH. На валу с кривошипом укреплены два кулачка, воздействующие в крайних положениях на конечные выключатели SQ1, SQ2 и движок сопротивления R3. Наибольший угол поворота — 120° Сопротивление R3 используется для сигнализации о положении регулирующего органа. § 15. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ С ЭЛЕКТРОМАГНИТНЫМИ ПРИВОДАМИ Электромагнитные исполнительные механизмы объединяют приводы с электромагнитами и приводы с электромагнитными муфтами Исполнительные механизмы с приводом от электромагнитных
Рис. 32. Принципиальные схемы электромагнитных приводов: а - электромагнитные муфты скольжения; б - электромагнит; в - характеристики электромагнита муфт. Такие механизмы применяются в основном для передачи вращательного движения. Существует два типа муфт: фрикционные и электромагнитные муфты скольжения. Фрикционные муфты предназначены для периодического включения и отключения валов механизмов. Конструктивно они состоят из ведомых и ведущих дисков муфт. Силы трения, возникающие между их поверхностями, позволяют передавать крутящий момент. Электромагнитные муфты скольжения представляют собой устройства для плавного регулирования частоты вращения рабочего вала, приводимого в движение электродвигателем переменного тока, в пределах 1 Муфта состоит из двух половин — ведущей (якоря) 1, ведомой (индуктора) 2 с обмоткой 3. Первая приводится от асинхронного электродвигателя, вторая соединена с валом рабочей машины через шкив 6. Обмотка питается постоянным током от усилителя ЭУ, присоединенного через сопротивление R4 к контактным кольцам 5. С изменением силы тока в обмотке изменяются величина магнитного потока и величина скольжения ведомой части муфты 2 относительно ведущей 1. При этом плавно изменяется частота вращения вала муфты. Тахогенератор и электронный усилитель образуют контур отрицательной обратной связи по скорости, что позволяет стабилизировать заданную скорость. Муфты имеют низкий КПД, поэтому применяют их редко. В эксплуатации можно встретить приводы подач деревообрабатывающих станков с муфтами скольжения типа ПМС-М в стружечных, шлифовальных, рейсмусовых и других станках. Исполнительные механизмы с электромагнитным (соленоидным) приводом. Их используют в случаях, когда регулирующему органу необходимо сообщать поступательное перемещение. Поэтому эти механизмы применяют при двухпозиционном регулировании.
Тяговое усилие электромагнитов определяется по формуле где Т = L/R — постоянная времени электромагнита; L — индуктивность обмотки при опущенном якоре, Гн; R — активное сопротивление обмотки, Ом; Кэ = Ip /Icp — коэффициент запаса электромагнита по току; Ip и Icp —рабочий ток и ток срабатывания электромагнита соответственно. Электромагниты широко используют для управления гидравлическими золотниками, пневматическими кранами, тормозными устройствами, переключением механизмов в станках, прессах и поточных линиях. Электромагниты имеют несколько конструктивных исполнений (см. рис. 32, б) с катушкой / и поступательно перемещающимся якорем 2. Могут изготавливаться с якорем, поворачивающимся на некоторый угол. Тяговое усилие в паспортах электромагнитов указывается для максимального рабочего хода X. Для питания электромагнитов используют как постоянный, так и переменный ток. Часто применяют короткоходовые электромагниты (2—5 мм) МП, длинноходо-вые (50—150 мм) КМП, ВМ, электромагниты переменного тока длинноходовые ЭС (однофазные) и КМТ (трехфазные). Тяговые характеристики электромагнитов представлены на рис. 32, в. Из характеристик очевидно, что при равных условиях у электромагнитов переменного тока тяговая характеристика хуже. Величина переменного тока зависит от воздушного зазора. Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1234; Нарушение авторского права страницы

 — КПД редуктора; Iн — момент инерции нагрузки, включая момент инерции редуктора; Iдв — момент инерции электродвигателя; ip — передаточное отношение редуктора;
— КПД редуктора; Iн — момент инерции нагрузки, включая момент инерции редуктора; Iдв — момент инерции электродвигателя; ip — передаточное отношение редуктора;  н — угловая скорость вращения нагрузки;
н — угловая скорость вращения нагрузки;  н — угловое ускорение нагрузки.
н — угловое ускорение нагрузки.





 МT и
МT и 





 —коэффициенты передачи
—коэффициенты передачи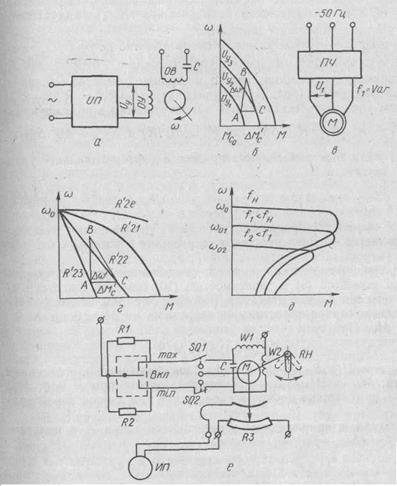





 f1/p.
f1/p.



 10 (рис. 32, а).
10 (рис. 32, а).
 — магнитная проводимость воздушного зазора
— магнитная проводимость воздушного зазора 