
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Арифметико-логическое устройство.Стр 1 из 6Следующая ⇒
Датчики. Общие сведения. · Указать назначение датчиков. · Изобразить структурную схему датчика. · Указать характеристики датчиков. · Дать классификацию датчиков. Ответ
В системах автоматики датчик предназначен для преобразования контролируемой или регулируемой величины в выходной сигнал, более удобный для дальнейшего движения информации. В общем виде датчик можно представить в виде чувствительного элемента ЧЭ и преобразователя Пр.
Чувствительный элемент предназначен для преобразования контролируемой величины Х в такой вид Х1, который удобен для измерения. В преобразователе происходит преобразование неэлектрического сигнала Х1 в электрический сигнал Y. Электрические датчики делятся: 1) параметрические- служат для преобразования неэлектрического параметра в параметры электрической цепи. Получают электрическую энергию от вспомогательного источника энергии. Делятся на: Датчики активного сопротивления: · контактные; · реостатные; · потенциометрические · тензодатчики; · терморезисторы датчики реактивного сопротивления: · индуктивные; · емкостные 2) генераторные- служат для преобразования неэлектрического параметра в ЭДС. Не требуют дополнительного источника энергии. Делятся: · термоэлектрические · пьезоэлектрические · тахометрические Общие характеристики датчиков. Статическая характеристика датчика представляет собой зависимость изменения выходной величины от входной, т.е. y=f(x), где х – входная величина, y – выходная величина. Чувствительность датчика – отношение приращения выходной величины к приращению входной, т.е. S=∆ y/∆ x. Следовательно, чувствительность есть не что иное, как коэффициент передачи. Порог чувствительности датчика – наименьшее значение входной величины, которое вызывает появление сигнала на выходе. Этот параметр связан с зоной нечувствительности, т.е. зоной, в пределах которой при наличии входного сигнала на выходе датчика сигнал отсутствует. Инертность датчика – время, в течении которого выходная величина принимает значение, соответствующее входной величине. По характеру получения сигнала от измеряемой величины датчики разделяют на параметрические, в которых изменение измеряемой величины вызывает изменение какого либо параметра (сопротивления, давления, индуктивности и т.д.), и генераторные, у которых изменение измеряемой величины вызывает генерацию сигнала (термо ЭДС, фототок и т.д.). Генераторные датчики не требуют постороннего источника энергии. По характеру зависимости выходного сигнала от входного различают датчики: пропорциональные, у которых сигнал на выходе пропорционален измеряемому сигналу; нелинейные, у которых сигнал на выходе нелинейно зависит от сигнала на входе; релейные, у которых сигнал на выходе изменяется скачкообразно; циклические, у которых сигнал на выходе пропорционален измеряемой величине или нелинейно зависит и повторяется циклически; импульсные, у которых изменение входной величины вызывает появление импульсов, число которых пропорционально измеряемой величине. Схемы включения измерительных и преобразовательных элементов датчика могут быть дифференциальные, компенсационные, мостовые и т.д.
Арифметико-логическое устройство. · Дать определение АЛУ. · Дать классификацию АЛУ в зависимости от построения и характера работы. · Дать классификация АЛУ в зависимости от логической структуры. · Дать определение ширины обработки АЛУ.
Ответ Разнообразные арифметические и логические операции выполняются в устройствах, называемых арифметически-логическими устройствами. B зависимости от построения и характера работы различают АЛУ последовательного, параллельного и параллельно-последовательного действия. В АЛУ последовательного действия операции над кодами осуществляются последовательно, разряд за разрядом. Код числа представляется в виде серии сигналов, действующих в одной и той же цепи в различные моменты времени. Сигнал, проходящий в данный момент времени по цепи, соответствует определенному разряду кода числа, в следующий момент — другому разряду и т. д. В АЛУ параллельного действия операции над кодами чисел осуществляются параллельно по всем разрядам. Коды чисел в таких АЛУ изображаются в виде совокупности сигналов, каждый из которых действует по своей определенной цепи. Число цепей при этом соответствует числу разрядов. Такие АЛУ получили наиболее широкое распространение. В АЛУ параллельно-последовательного действия коды чисел разбиваются на группы из определенного количества разрядов. Операция над кодами чисел осуществляется параллельно над разрядами данной группы. Сами же группы разрядов обрабатываются последовательно. В зависимости от логической структуры АЛУ могут быть комбинационного и блочного типа. АЛУ комбинационного типа универсальны, так как все арифметические и логические операции выполняются с помощью одних и тех же " элементов и узлов. Основу таких АЛУ составляют сумматор и регистры, которые при выполнении отдельных операций коммутируются между собой определенным образом посредством групп логических элементов. АЛУ блочного типа состоят из отдельных блоков сложения, умножения, деления и т. д. Такие АЛУ имеют большее быстродействие, чем АЛУ комбинационного типа, однако для своей реализации требуют больше оборудования. Ширина обработки – это число одновременно обрабатываемых разрядов, данных.
Термоэлектрические датчики. · Указать назначение термоэлектрических датчиков. · Изобразить схему термоэлектрического датчика. · Описать принцип работы. · Перечислить материал, применяемый при изготовлении датчиков. Ответ
Схема термоэлектрического датчика
Термоэлектрические датчики предназначены для измерения температуры. Они состоят из термоэлектродов 1 и 2, изготавливающихся из разнородных проводников. Одни концы этих проводников спаяны, а другие служат выходом датчика, откуда снимается выходное напряжение. Точка спая помещается в контролируемую среду. Если температура свободных концов термопары t1 отличается от горячего спая t2, то в силу термоэлектрического эффекта в термоэлектродах возникает термо ЭДС, пропорциональная разности температур. Это можно объяснить тем, что энергия свободных электронов в различных металлах с ростом температуры возрастает по разному. Если вдоль проводника существует перепад температуры, то электроны на горячем конце приобретают более высокие энергию и скорость, чем на холодном. Благодаря этому возникает движение электронов то горячего конца к холодному, разное в разных металлах. При наличии замкнутой цепи разное движение электронов создает ток, который можно трактовать, как результат возникновения термо ЭДС в горячем спае. За счет этой ЭДС возникает выходное напряжение: Uвых = Et = C(t2-t1) C – коэффициент пропорциональности зависящий от материала проводников термопары. Возникновение термо ЭДС позволяет называть термопару датчиком – генератором. Чаще всего применяют термопары: хромель – копель (до 600 оС длительный нагрев); хромель – алюмель (до 1000 оС); платина – платинородий (до1300 оС); вольфрам – молибден (до 2100 оС) Термо ЭДС при максимальной рабочей температуре не превышает 10 – 50 мВ.
Ответ
Под стандартным интерфейсом понимается совокупность унифицированных аппаратурных, программных и конструктивных средств, необходимых для реализации взаимодействия различных функциональных элементов в автоматических системах сбора и обработки информации при условиях, предписанных стандартом и направленных на обеспечение информационной, электрической и конструктивной совместимости указанных элементов. Проектирование интерфейсов выполняется на основе четырех основных взаимосвязанных принципов: группового, агрегатирования, унификации, взаимозаменяемости. Принцип группового проектирования заключается в создании ряда (семейства) функционально и конструктивно подобных устройств (модулей, систем)определенного назначения, соответствующих разнообразным условиям их использования. Основная задача группового проектирования — достижение максимальной универсальности и совместимости ЭВМ, вычислительных комплексов внутри проектируемого ряда. Принцип агрегатирования (модульного построения) состоит в рациональном разделении системы (устройства) на совокупность более простых функционально и конструктивно законченных блоков (модулей) с целью совершенствования их технических характеристик, а также обеспечения высокопроизводительных способов производства и обслуживания. Принцип унификации заключается в минимизации номенклатуры составных узлов, блоков устройства, модулей, связей между ними при условии рациональной компоновки и эффективного функционирования устройства или системы. Интерфейс можно рассматривать как практический пример унификации связей и устройств сопряжения составных элементов ЭВМ и систем. Принцип взаимозаменяемости основывается на способности модуля выполнять в устройстве различные установочные функции без дополнительной конструкторской доработки. Взаимозаменяемость является следствием процесса унификации.
Пьезоэлектрические датчики. · Указать назначение пьезоэлектрического датчика. · Изобразить схему пьезоэлектрического датчика. · Описать принцип работы.
Ответ
Схема пьезоэлектрического датчика.
Пьезоэлектрические датчик используются для измерения сил, давления, вибраций и для других измерений, в которых проявляются силовые воздействия. Пьезоэлектрические датчики для измерения сил представляют собой кварцевую пластину 1 (рисунок). С двух ее напылены или приклеены токопроводящим клеем электроды 2, с которых снимается выходное напряжение. Два электрода и кварцевый диэлектрик образуют конденсатор, на электродах которого присутствуют электрические заряды, возникающие вследствие прямого пьезоэлектрического эффекта при сжатии кварцевой пластины силой Р. Электрический заряд пропорционален сжимающей силе: Q = α P, где α – коэффициент пропорциональности, называемый пьезомодулем. Под действием изменяющейся силы Р на электродах появляется выходное напряжение Uвых. Выходное напряжение датчиков изменяется от единиц милливольт, то единиц вольт.
Отсюда видно, что зная Эти датчики безинерционны. Для усиления
Ответ
К основным функциям устройств управления относятся определение последовательности выборки команд из памяти, расшифровка команд и их реализация, выполнение операций управления. Независимо от типа и вида универсальные устройства управления в общем случае имеют одинаковую структуру и состоят из блоков управления командами БУК (для преобразования команд), микрокоманд БМК (для выработки управляющих сигналов), прерываний БП (для реакций ЭВМ на внешние воздействия), пульта управления ПУ (для ручного управления). Блок управления командами предназначен для реализации всех операций, связанных с выполнением первых трех основных функций УУ: выборки очередной команды; хранения команды в течение цикла; преобразования адресной части команды. Блок микрокоманд предназначен для преобразования операционной части команды и формирования необходимых наборов управляющих сигналов для выполнения заданных операций. Код операции, как исходная информация, поступает в БМК из блока управления командами БУК в начале цикла. Для преобразования кодов в управляющие сигналы в БМК используются дешифраторы и шифраторы (сборки). При этом в БМК существуют дешифраторы кодов операции и дешифраторы признаков. Схемы дешифраторов в БМК будут функционировать только в том случае, если с кодом операции в БМК поступает код признака модификации выполняемой операции. В некоторых случаях в БМК передаются также коды других признаков. Для синхронизации работы устройства управления в блок микрокоманд БМК поступают синхросигналы управления (ССУ). Таким образом, БМК может быть представлен как совокупность узлов, обеспечивающих дешифрирование кодов операций и признаков и временное распределение микрокоманд и шифрацию (объединение) микрокоманд по типам. Такие узлы представляют собой логические схемы, дополненные запоминающими элементами, построенными на триггерах», Для временного распределения сформированных управляющих сигналов с целью их тактирования используются генераторы тактовых или синхронизируемых импульсов. Устройства управления с БМК, построенные по этому принципу, относятся к УУ со схемным формированием наборов управляющих сигналов.
Индуктивные датчики. · Указать назначение индуктивных датчиков. · Изобразить схему индуктивного датчика с подвижным якорем. · Описать принцип работы. · Описать принцип работы индуктивного датчика с подвижным сердечником по предложенной схеме. · Описать принцип работы.
Ответ Принцип действия основан на изменении индуктивности катушки с подвижным якорем вследствие изменения магнитной проницаемости. Индуктивные датчики можно использовать как датчики пути, положения или размерные.
На рисунке изображен индуктивный датчик с подвижным якорем. Если перемещать якорь 1 датчика, воздушный зазор δ будет изменяться, что вызовет изменение индуктивности обмотки. Сила тока в цепи обмотки датчика I=U/Z=UП/√ R2+XL2, Где Z – полное сопротивление цепи, UП – напряжение питания датчика; R – активное сопротивление цепи; XL = 2π f L– индуктивное сопротивление обмотки. Если UП, R, f постоянны, то сила тока I в катушке, а следовательно, и напряжение U будут пропорциональны воздушному зазору δ. Датчики работают при частоте питающей сети 50 – 5000Гц. Индуктивный дифференциальный размерный датчик (рисунок б) состоит из двух катушек 2, 4, на которых расположены обмотки, подключаемые по дифференциальной схеме или в плечи измерительного моста. В катушках расположен сердечник 3, соединенный с измерительным штоком 1, который контактирует с измеряемой поверхностью. При среднем положении сердечника, т.е. при δ 1 = δ 2 , параметры катушек одинаковы, тогда I1 = I2. Так как обмотки соединены по дифференциальной схеме, сигнал на выходе датчика равен нулю. При изменении положения сердечника, когда δ 1 ≠ δ 2, происходит изменение индуктивности обмотки, тогда I1 = I2, I1 > I2, I1 < I2. Сигнал будет пропорционален перемещению сердечника, а его знак будет определять направление перемещения. В индуктивных дифференциальных датчиках трансформаторного типа при изменении положения сердечника (плунжера) меняется взаимоиндукция между первичной и вторичной обмотками, что вызывает во вторичных обмотках изменение индуцируемой ЭДС.
Ответ
ПЗУ предназначены для хранения и оперативного считывания той информации, которая является неизменной в процессе работы ЭВМ. Скорость считывания информации из ПЗУ сравнима со скоростью работы узлов процессора. Запись информации в ПЗУ в процессе работы невозможна. В связи с тем, что ПЗУ предназначено только для хранения и считывания информации, его быстродействие и плотность размещения информации выше, чем в ОЗУ. Код адреса КА числа фиксируется в регистре адреса РгА и дешифрируется дешифратором адреса ДША. Выходной сигнал с ДША подается на формирователь импульсов тока ФИ. Постоянная информация записана в накопителе информации НИ. Выходные сигналы с НИ считываются и усиливаются блоком усилителей считывания БУСч. Далее сигналы записываются в виде кода в выходной информационный регистр числа РгЧ. необходимая последовательность управляющих сигналов формируется с помощью блока управления БУ. В ЭВМ получили широкое распростронение ПЗУ трансформаторного типа. Блок памяти ПЗУ такого топа на ферромагнитных запоминающих элементах, в качестве которых используются ферритовые сердечники с непрямоугольной петлей гистерезиса, работающие как линейные трансформаторы. Кострукция ПЗУ такова, что обеспечивает относительно быструю и удобную смену информации механическим путем. Накопитель информации конструируется по модульному принципу с целью обеспечения набора требуемой емкости памяти ПЗУ. Ответ Микропроцессорной системой (МПС) называется система цифровой обработки информации, содержащая в своем составе по крайней мере один микропроцессор, один или несколько модулей памяти, устройства ввода-вывода, блоки сопряжения с устройствами ввода-вывода (контроллеры). Перечисленные компоненты микрокомпьютера связаны друг с другом с помощью системной магистрали, состоящей в общем случае из трех магистралей адресов, данных и управления. Кроме того, в микрокомпьютер входит источник питания. В общем случае основная память (ОП) содержит оперативное запоминающее устройство (ОЗУ) и постоянное запоминающее устройство (ПЗУ). ОЗУ обеспечивает как чтение находящейся в нем, так и запись в него новой информации. Обычно ОЗУ реализуется как энергозависимая память, содержимое которой разрушается (стирается) при выключении микрокомпьютера. С другой стороны, ПЗУ обеспечивает только чтение хранящейся в нем информации и реализуется в виде энергонезависимой памяти, содержимое которой не разрушается при отключении источника питания. В ПЗУ помещают обычно некоторые программы и константы. Запись информации в модули ПЗУ осуществляется вне компьютера на специальных устройствах — программаторах. Внешние, или периферийные, устройства микрокомпьютера предназначены для ввода информации, подлежащей обработке, и вывода результатов обработки или вычислений. Таким образом, в состав внешних устройств (ВУ) входят как устройства ввода (УВв), так и вывода (УВыв): клавиатура, экран дисплея, печатающее устройство (принтер), накопитель на гибких или жестких магнитных дисках, графопостроитель, аналого-цифровой или цифроаналоговый преобразователь и т. п. Контроллеры ввода и вывода (КВв и КВыв) представляют собой устройства сопряжения соответствующих устройств ввода и вывода с системной магистралью (СМ). Системная магистраль, состоящая из магистралей адресов (МА), данных (МД) и управления (МУ), обеспечивает коммуникацию важнейших узлов микрокомпьютера друг с другом. Каждая из них представляет собой набор проводников, по которым микропроцессор передает или принимает определенные электрические сигналы. МА предназначена для передачи цифрового адреса ячейки памяти или ВУ из микропроцессора. По МД передаются данные, например информация из регистров микропроцессора в ОЗУ и наоборот. По МУ пересылаются сигналы управления, которые сопутствуют любой передаче адресов или данных. В некоторых микрокомпьютерах для упрощения СМ вместо двух магистралей МА и МД имеется одна общая магистраль адресов и данных (МАД). Источник питания (ИП), входящий в состав микрокомпьютера, формирует обычно два выпрямленных стабилизированных напряжения. Центральной частью микрокомпьютера является микропроцессор — программно-управляемое электронное цифровое устройство, построенное на одной или нескольких БИС (или СБИС) и предназначенное для цифровой обработки информации. Длина разрядной сетки, набор выполняемых команд и быстродействие определяют характеристики всего микрокомпьютера.
Структурная схема микрокомпьютера
Ответ Системой автоматического управления называют такую систему, в которой организация целенаправленных действий осуществляется управляющим элементом, на который подается управляющий сигнал. Этот сигнал может подаваться вручную или автоматически, т.е. системой автоматики другого процесса. Системы могут быть разомкнутыми или замкнутыми.
От управляющего (задающего) элемента (ЗЭ) сигнал управления поступает на усилитель (У), усиливается до необходимой величины и поступает на исполнительный элемент ИЭ. С помощью исполнительного элемента происходит воздействие на объект управления таким образом, что автоматически выполняется программа изменения управляемой величины. С помощью автоматического управления исключается участие человека в управлении операциями технологического процесса. Человеку остается только предварительно выбрать программу действий, а иногда подать пусковой сигнал. Получив начальный импульс, система управляет в заданной последовательности ходом технологического процесса.
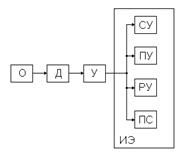
Ответ Система автоматического контроля (САК) предназначена для автоматического контроля различных физических величин (параметров), сведения о которых необходимы при управлении объектом. Всякая система состоит из элементов, узлов и устройств, выполняющих ту или иную функцию; следовательно, систему автоматического контроля можно представить схематически.
Датчик (Д) измеряет значение контролируемого параметра объекта (О) и преобразует неэлектрическую величину в электрическую. Усилитель (У) - устройство, усиливающее слабый сигнал, поступающий от датчика, так, что он становится достаточным для воздействия на исполнительный элемент. Исполнительный элемент (ИЭ) - устройство, посредством которого выполняются заключительные операции. Элементы передачи и связи - устройства, обеспечивающие передачу сигналов от датчика до ИЭ. В состав систем автоматизации производственных процессов входят дополнительные элементы, не участвующие в преобразовании информации, а обеспечивающие данное преобразование. К ним относятся источники энергии, стабилизаторы, переключатели и др. В зависимости от вида исполнительного элемента автоматический контроль разделяют на 4 основные группы: автоматическая сигнализация характерных или предельных значений параметров; сигнализирующее устройство (СУ) - лампочки, звонок, сирена; автоматическое указание значений контролируемых параметров; указывающий прибор (ПУ) может быть стрелочным, цифровым; автоматическая регистрация значений контролируемого параметра; регистрирующее устройство (РУ) - это самописец; автоматическая сортировка различных изделий в зависимости от заданных значений контролируемых параметров (ПС - прибор сортирующий). Система автоматического контроля не вмешивается в ход протекания технологического процесса.
Ответ Система автоматического регулирования (САР) обеспечивает поддержание регулируемой величины (параметра) в заданных пределах или по заданному закону.
Задающий элемент воспроизводит задающее воздействие, определяющее закон изменения регулируемой величины. Как правило, эта величина задается в косвенном виде. Например, температура задается значением напряжения; давление - значением натяга пружины и т.д.На элемент сравнения (ЭС) поступает заданное значение хЗ регулируемого параметра с задающего элемента (Э) и значения сигнала обратной связи хОС с датчика (Д) обратной связи – функция фактической величины регулируемого параметра хФ. В элементе сравнения сопоставляется требуемое значение регулируемого параметра с действительным его значением. В результате этого сопоставления в элементе сравнения вырабатывается управляющий сигнал ∆ х=хЗ-хОС. Обычно этот сигнал слабый, он поступает на усилитель (У), где усиливается да значения k∆ х и направляется на исполнительный элемент (ИЭ). С исполнительного элемента управляющее воздействие хР поступает на объект регулирования и корректирует фактическое значение регулируемого параметра до заданного значения.
Ответ
Связующим звеном в системах автоматизированной обработки данных между ЭВМ и абонентами (объектами управления) являются мультиплексоры передачи данных (МПД), которые часто называют устройствами сопряжения или концентраторами. В системе автоматизированной обработки данных МПД выполняет две основные функции: передатчика и приемника. Мультиплексор Мпредназначен для организации одновременного обмена информацией канала с несколькими периферийными устройствами ПУ в мультиплексном режиме. Он работает в режиме разделения времени, осуществляя пословную передачу информации между каналом обмена и одним из трансляторов Т1— Тп.Мультиплексор выполнен в виде взаимозаменяемого модуля, что позволяет подключать устройство сопряжения к различным ЭВМ путем простой установки соответствующего мультиплексора. Каждое ПУ соединяется с одним соответствующим ему транслятором Т используемым в качестве согласующего блока между мультиплексором и этим внешним устройством. Трансляторы T1—Тптакже выполнены в виде взаимозаменяемых модулей. Поэтому в случае подключения другого ПУ достаточно заменить в устройстве сопряжения один транслятор. Транслятор принимает или передает очередное информационное слово и выдает сигнал готовности к обмену с ЭВМ. Схема приоритета мультиплексора анализирует готовность ПУ и выбирает то ПУ, которое имеет старший приоритет. Номер транслятора, выбранный этой схемой, передается в канал обмена, который извлекает из памяти соответствующего подканала текущие параметры процесса обмена, заносит их в соответствующие регистры и готовит свои цепи для передачи очередного слова информации. На этом цикл передачи информации заканчивается и аппаратура становится готовой к передаче следующего цикла.
Устройства управления. · Указать основные функции устройств управления. · Дать классификацию УУ по способу выполнения команд. · Дать классификацию УУ по своим возможностям. · Дать классификацию УУ по принципу формирования управляющих сигналов. Ответ
К основным функциям устройств управления относятся определение последовательности выборки команд из памяти, расшифровка команд и их реализация, выполнение операций управления. По способу выполнения команд в ЭВМ могут быть использованы синхронный, асинхронный и смешанный принципы управления. В УУ, реализующих принцип синхронного управления, длительность цикла выбирается постоянной и одинаковой для всех реализуемых операций. Особенности работы таких УУ следующие: длительность цикла постоянна, и в каждом цикле вырабатывается одинаковое число управляющих сигналов; длительность цикла выбирается равной длительности выполнения самой продолжительной операции; все управляющие сигналы вырабатываются одним, общим для устройства управления генератором; при выполнении операций, длительность которых короче длительности самой продолжительной операции, некоторые микрооперации и соответствующие им управляющие сигналы вырабатываются «вхолостую». УУ, реализующих асинхронный принцип управления, вырабатывается столько управляющих сигналов, сколько требуется для выполнения данной операции. При этом время цикла, отведенное для выполнения любой операции, переменно и может быть разным даже при выполнении одной и той же операции. В данном случае осуществляется контроль за окончанием микроопераций в такте и обеспечивается переход к действиям следующего такта сразу же после окончания предыдущего. В УУ, реализующих смешанный принцип управления, длительность машинного цикла устанавливается для групп операций, требующих по своему характеру приблизительно одинакового времени выполнения. Для выполнения операций, требующих большего интервала времени, используются местные УУ. По своим возможностям УУ подразделяются на универсальные и с жесткой программой. Универсальные УУ обеспечивают управление любых программ и используются в большинстве ЭВМ. УУ с жесткой программой обеспечивают выполнение лишь отдельных фиксированных программ, что имеет место в специализированных ЭВМ. По принципу формирования управляющих сигналов различают УУ с жесткой логикой и микропрограммные (с хранимой логикой). В первом случае для каждой команды процессора имеется набор логических схем, которые в нужных тактах возбуждают соответствующие управляющие сигналы. Такой принцип управления получил название жесткой логики. Во втором случае микропрограммы выполнения операций хранятся в постоянной памяти (ПП). Считывая последовательно микрокоманды из ПП, можно выработать требуемую последовательность управляющих сигналов.
Ответ
Разнообразные арифметические и логические операции выполняются в устройствах, которые называются арифметико-логическими устройствами. В последнее время широко используются АЛУ с магистральной связью.В состав АЛУ входят регистры Рг1-Рг2, коммутатор К, сумматор СМ и устройство управления УУ. В таком АЛУ регистры обычно служат только для хранения операндов и результатов вычислений, а их входные цепи содержат только схемы, обеспечивающие прием информации. Любой из регистров может быть подключен коммутатором К к выходной магистрали. Прием информации в регистры из оперативной памяти ОП производится только через входную магистраль, а выдача результатов в ОП — с выходной магистрали. Операнды поступают на сумматор СМ с выходной магистрали. Это позволяет производить операции над числами, расположенными в любых регистрах, что является существенным достоинством данной схемы. Результат операции через входную магистраль отсылается с сумматора СМ в один из регистров.
Потенциометрический датчик. · Указать назначение потенциометрических датчиков. · Описать принцип работы потенциометрического датчика по предложенной схеме. · Указать материал, используемый при изготовлении датчиков, указать достоинства и недостатки датчиков.
Схема потенциометрического датчика
Ответ
Потенциометрические датчики предназначены для измерения линейных и угловых перемещений. Потенциометрический датчик состоит из потенциометров П1 и П2, которые подключены параллельно к общему источнику питания UП. Подвижные контакты потенциометров К1 и К2 соединены механически с задающим (ЗРО) и исполнительным (ИРО) рабочими органами. Напряжение, снимаемое с подвижных контактов потенциометров, является напряжением сигнала UС. При согласованном положении рабочих органов (подвижные контакты находятся в одинаковом положении), когда α = β, напряжение сигнала равно 0. При рассогласованном положении, когда α ≠ β, сигнал на выходе датчика неравен 0. Причем сигнал будет пропорционален углу рассогласования, т.е. UС = α -β , а знак сигнала определяет направление рассогласования. Для изготовления датчиков применяется константановая, манганиновая, нихромовая проволока. Также применяется проволока из сплавов серебра, платины и золота. Достоинства: конструктивная простота, малая масса, небольшие габариты, возможность питания постоянным и переменным током, простота регулировки, высокая стабильность. Недостатки: наличие подвижного контакта, снижающего надежность работы и срок службы, невысокая чувствительность, нелинейность характеристики при низкоомной нагрузке и наличие ошибки от ступенчатости характеристики. Тензодатчики. · Указать назначение тензодатчиков. · Изобразить схему тензодатчики. · Описать принцип работы. · Указать виды тензодатчиков, их достоинства и недостатки. Ответ Тензометрические датчики предназначены для определения упругих деформаций (растяжения, сжатия, изгибающих и крутящих моментов) деталей машин и конструкций в линейном и плосконапряженном состоянии при воздействии на них статических и динамических нагрузок.
Схема тензометрического датчика.
Основой конструкции датчиков (рисунок8) служит константановая проволока (1) диаметром 0, 01 – 0, 05 мм, сложенная зигзагообразной решеткой между склеенными полосками бумаги или пленки (2). Для измерения деформации датчик приклеивается к поверхности измеряемой детали. При воздействии на испытуемую деталь или конструкцию каких-либо деформаций, например растяжения, будет растягиваться проволока датчика. При этом за счет увеличения длинны l проволоки тензодатчика и уменьшением её сечения S сопротивление проволоки R=ρ l/S увеличивается. Это сопротивление является выходной величиной датчика. Такая деформация показана на рисунке8 сплошной стрелкой. Если деформацию направить так, как показано пунктирной стрелкой, проволока тензодатчика в местах её изгиба еще больше изогнется. Длинна и толщина проволоки при этом практически не меняются, не меняется и сопротивление датчика. Отсюда видно, что деформацию такого вида датчик не измеряет. Основными характеристиками тензодатчиков являются: номинальное сопротивление R. Длина решетки (база) l, коэффициент тензочувтвительности
где
Значение коэффициента тензочувтвительности 1, 8-2, 5 и зависит от технического изготовления датчика и материала его проволоки. Достоинства: малые габариты и масса, почти полное отсутствие их влияния на деформацию детали, линейность характеристики. Кроме проволочных существуют еще тензодатчики, у которых проводящий элемент делается из фольги толщиной 4-12 мм. По сравнению м проволочными у этих датчиков сила рабочего тока значительно выше, следовательно, повышена чувствительность датчика. Полупроводников Популярное: |
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1070; Нарушение авторского права страницы




 -емкость датчика (конденсатора, образованного электродами и кварцевым диэлектриком)
-емкость датчика (конденсатора, образованного электродами и кварцевым диэлектриком) -емкость монтажа.
-емкость монтажа. , можно определить силу Р. Если Р постоянна, то
, можно определить силу Р. Если Р постоянна, то 







 -абсолютное изменение длины проволоки,
-абсолютное изменение длины проволоки,  -относительное изменение длины проволоки;
-относительное изменение длины проволоки;  -относительное изменение сопротивления тензодатчика.
-относительное изменение сопротивления тензодатчика.