
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Способы устройства свайных фундаментовСтр 1 из 6Следующая ⇒
Свайные молоты Свайный молот включает в себя ударник — падающую или ударную часть, наковальню или шабот - неподвижную часть, жестко соединенную с головой сваи. Кроме того, в состав свайного молота входят устройства для подъема ударной части и ее направления. Различают механические, паровоздушные, дизельные и гидравлические свайные молоты. Механический молот является простейшим механизмом в виде металлической отливки массой до 5т, поднимаемой вдоль мачты копра канатом подъемной лебедки и сбрасываемой на погружаемую сваю путем отсоединения каната специальным расцепляющим устройством или отключением барабана лебедки от трансмиссии. Из-за низкой производительности (4...12 ударов в мин) механические молоты применяют в основном при незначительных объемах свайных работ.
Паровоздушный молот представляет собой пару «цилиндр—поршень». В молотах одиночного действия (рис.160, а) поршень З через шток 2 соединен с наголовником 1 сваи, а ударной частью является цилиндр 4. Под действием сжатого воздуха или пара, подаваемого в поршневую полость цилиндра откомпрессора или паросиловой установки, цилиндр поднимается вверх, а после перекрытия впускного трубопровода и соединения поршневой полости с атмосферой (рис.160, б) цилиндр падает, ударяя по наголовнику сваи. Впуском и выпуском сжатого воздуха (пара) управляют вручную, полуавтоматически или автоматически. Молоты с автоматическим управлением работают с частотой ударов 40...50 мин-1. В молотах двойного действия (рис.160, в) ударной частью является соединенный с поршнем 3 боек 5, движущийся внутри цилиндра 4. Сжатый воздух (пар) подают поочередно в нижнюю штоковую и верхнюю поршневую (рис.160, г) полости цилиндра, обеспечивая этим подъем поршня с бойком и его принудительное падение на ударную плиту - наковальню 6 (рис.160, в) с частотой 3 с-1. По сравнению с молотами одиночного действия описанные молоты производительнее при меньшем отношении массы ударной части к общей массе молота, не превышающем 1/4, в то время как у молотов одиночного действия это отношение равно в среднем 2/3. Паровоздушные молоты используют для забивки вертикальных и наклонных свай на суше, а также под водой. Основным их недостатком является зависимость от компрессорных или паросиловых установок. Гидравлический молот работает по схеме паровоздушного молота двойного действия с тем отличием, что вместо воздуха или пара в рабочий цилиндр подают жидкость, для чего сваебойный агрегат оборудуют насосной установкой. Для придания ударной части ускорения в момент удара к насосу подсоединяют гидравлический аккумулятор, который подзаряжается во время обратного хода поршня. Гидравлические молоты с массой ударной части 210...7500 кг развивают энергию удара от 3, 5 до 120 кДж при частоте ударов 50... 170 мин-1. Дизельные молоты (рис.161), работающие независимо от внешних источников энергии в режиме двухтактного дизеля получили наибольшее распространение в строительстве. Различают дизель-молоты с направляющими штангами (штанговые) и с направляющим цилиндром (трубчатые). У штанговых дизель-молотов (рис.161, а) две направляющие штанги 4 объединены в нижней части основанием 2, отлитым заодно с поршнем 12. Основание поршневого блока опирается на сферическую пяту 1 и наголовник 15. По штангам перемещается цилиндр 10, являющийся ударной частью молота. В верхней части штанги объединены траверсой захвата («кошки»), свободно перемещающейся по ним и подвешенной к канату 8 лебедки копра. Для запуска молота «кошку» опускают до зацепления подпружиненным крюком 6 пальца 5 ударной части, после чего ударную часть 10 поднимают и рывком нажатием на рычаг 9 через присоединенный к нему канат расцепляют «кошку» с ударной частью. Последняя падает вниз, нанося удар по основанию 2 и сжимая воздух в закрытой поршнем 12 полости цилиндра. Одновременно выступающий на ударной части штырь 11 нажимает на рычаг топливного насоса 14, которым по центральному каналу 13 в поршне топливо подается в цилиндр с некоторым опережением конца хода, распыляется форсункой 3 и смешивается с нагретым вследствие сжатия воздухом. В последней фазе движения ударной части вниз вследствие дополнительного сжатия топливно-воздушной смеси происходит ее воспламенение. Расширяющиеся вследствие сгорания топлива газы отбрасывают ударную часть вверх, откуда она снова падает, повторяя процесс. Молот выключают прекращением подачи топлива. Штанговые дизель-молоты не имеют принудительного охлаждения, в связи с чем в летнее время при температуре окружающего воздуха 25 °С они работают с получасовыми перерывами после каждого часа работы. Эти молоты обладают малой энергией удара - 3, 2 и 65 кДж при частоте 50...55 мин-1 и массе ударной части 240 и 2500 кг соответственно. Их применяют для забивки легких железобетонных и деревянных свай в слабые и средние грунты, а также для погружения шпунта при ограждении траншей, котлованов и т. п. В трубчатом, дизель-молоте (рис.161, б) ударной частью служит поршень 22, перемещающийся в
направляющем цилиндре 21. Удары поршня воспринимаются шаботом 17, герметично посаженным в нижнюю часть рабочей секции цилиндра. Молот центрируют на свае штырем 16. Для пуска молота его поршень поднимают «кошкой» 20, подвешенной к канату 8, и сбрасывают. При движении вниз поршень отжимает рычаг 23, которым включается насос 14, впрыскивающий в цилиндр порцию топлива из полости 19. Смешиваясь с воздухом, топливо стекает в сферическую выемку в шаботе. При дальнейшем падении поршень перекрывает канал 18, сообщающий цилиндр с атмосферой, и сжимает воздух в замкнутом уменьшающемся объеме. От удара поршня о шабот топливно-воздушная смесь разбрызгивается и воспламеняется. Расширяющиеся при сгорании смеси газы подбрасывают поршень вверх, откуда он снова падает, сжимая воздух, удаляя отработавшие газы через канал 18 в атмосферу и повторяя процесс. После прекращения подачи топлива молот останавливается. Трубчатые дизель-молоты охлаждаются внешним воздухом или принудительно - водой. Они работают без перегрева при температуре окружающего воздуха до 30 °С в первом и до 40 °С - во втором случаях. Отечественная промышленность выпускает трубчатые дизель-молоты массой ударной части 500...5000 кг с энергией удара 15...150 кДж при частоте ударов 43...45 мин-1, в том числе для работы в условиях низких температур (до -60 °С). Эти молоты применяют для забивки железобетонных свай в любые нескальные грунты. Дозаторы Бетон представляет собой искусственный каменный материал, получаемый из смеси вяжущих веществ, воды и заполнителей после ее формования и затвердевания. Строительные растворы не имеют в своем составе крупных заполнителей. До формования эти тщательно смешанные компоненты называют соответственно бетонной смесью и строительным раствором. Приготовление бетонных смесей и строительных растворов состоит из дозирования компонентов и их перемешивания. Для дозирования применяют дозаторы, а для перемешивания - смесительные машины или смесители. Дозаторы бывают объемными и весовыми. Первыми дозаторами материалы дозируют по объему, а вторыми — по массе. Объемные дозаторы более просты, но менее точны из-за непостоянства плотности и влажности дозируемых сыпучих материалов и условий заполнения мерных емкостей. Их применяют обычно для дозирования воды. Для дозирования сыпучих материалов их используют только в условиях строительных площадок для смесителей с объемом готового замеса до 250 л. По режиму работы различают дозаторы цикличные (порционные) и непрерывного действия. В порционных дозаторах материал дозируется в мерном или весовом бункере, а в дозаторах непрерывного действия материал подают в смесители непрерывным потоком с заданной производительностью. Управляют дозаторами автоматически или полуавтоматически с пульта управления. Весовой дозатор цикличного действия (рис.164) применяют для порционного автоматического взвешивания цемента, заполнителей, химических добавок и воды, а также выдачи отвешенных порций в смесители. Компоненты дозируют поочередно, загружая весовой бункер 8 сначала материалом с более
крупными размерами кусков, а затем - более мелкий, поверх первого. Сигнал на начало дозирования одного компонента поступает с пульта управления 1 к электропневматическому клапану 2, после срабатывания которого сжатый воздух от компрессорной установки поступает в пневмоцилиндр 3. Последний открывает впускной затвор 9 одного из бункеров 10 с дозируемым компонентом, который через воронку загружается в весовой бункер 8. Последний системой тяг и рычагов связан с весоизмерительным устройством 6 с циферблатным указателем. По достижении в весовом бункере требуемой дозы сигнал об окончании загрузки, сформированный задатчиком массы циферблатного указателя, поступает к пульту управления, который отключает клапан 2, а управляемый этим клапаном пневмоцилиндр 3 закрывает затвор, прекращая этим подачу материала в весовой бункер. После перенастройки задатчика массы циферблатного указателя так же дозируют второй компонент. Сигнал на разгрузку весового бункера поступает с пульта управления на электропневматический клапан 4, который открывает доступ сжатого воздуха в пневмоцилиндр 5. Последний открывает разгрузочный затвор 7, и отмеренные компоненты разгружаются в смеситель 6. Дозаторы рассмотренного типа различаются пределом взвешивания, зависящим от вместимости весового бункера и других связанных с ним параметров. В качестве питателей при дозировании песка, щебня и т.п. применяют ленточные питатели и затворы различных конструкций. При дозировании цемента используют аэрожелоба, шнековые и барабанные питатели. При дозировании жидкостей применяют затворы, обеспечивающие необходимую герметичность. Дозаторы непрерывного действия для сыпучих материалов представляют собой какой-либо питатель или сочетание питателей, в которых автоматически с требуемой точностью поддерживается заданная производительность. Независимо от конструктивных особенностей дозаторы непрерывного действия включают в себя питатель, измерительное устройство производительности и САР. На рис.165 приведена схема дозатора цемента. Дозируемый материал подается на ленту ленточного питателя 2 из загрузочного бункера с помощью лопастных питателей 7, в приводе которых установлен вариатор 16. Также вариатором 14 приводится в движение ленточный питатель. Производительность дозатора регулируют путем поддержания постоянного значения массы материала на ленте питателя 2 и изменения скорости движения ленты. Для стабилизации массы дозируемого материала ленточный питатель подвешен к раме дозатора шарнирно на оси приводного барабана и с помощью тяги — к коромыслу 3, уравновешенному грузом 6. При отклонении массы материала на ленте питателя от значения, соответствующего заданной производительности дозатора, коромысло отклоняется от своего равновесного положения, воздействуя на индуктивный преобразователь 5, с сердечником которого оно связано, в
результате чего на вход бесконтактного электронного регулятора 8 подается напряжение, отличное от нуля. Этот сигнал, пройдя тиристорный усилитель 9, включает двигатель 17 исполнительного механизма вариатора 16, передаточное отношение которого и, следовательно, частота вращения лопастных питателей будут изменяться до тех пор, пока масса материала на ленте питателя не достигнет заданного значения. Для устранения колебаний коромысла служит демпфер 4. Для изменения скорости движения ленты служит автоматическая цепь из синхронного генератора 10, задатчика 11, регулятора 12, тиристорного усилителя 13 и исполнительного двигателя 15. Генератор вырабатывает сигнал переменного тока с частотой, пропорциональной частоте выходного вала вариатора. Выпрямленное напряжение сравнивается с напряжением задатчика, соответствующим установленной производительности. Разность этих напряжений подается на вход регулятора, который через тиристорный усилитель включает исполнительный двигатель, изменяющий передаточное отношение вариатора до достижения нулевого сигнала на входе регулятора. Общее количество подаваемого в смеситель материала регистрируется счетчиком 7, кинематически связанным с головным барабаном ленточного питателя. Универсальные дозаторы (рис.166) применяют для дозирования заполнителей. Дозируемый материал
поступает на ленточный питатель 5 из бункера 3 через затвор 4. Нагрузка от шарнирно подвешенного питателя воспринимается грузоприемным устройством 6 и фиксируется встроенным в него силоизмерительным датчиком, сигнал от которого поступает в умножитель 7. Второй, скоростной сигнал поступает на умножитель от тахогенератора 2 через преобразователь 8. Результат преобразования сигналов в умножителе поступает в блок задания и сравнения 13, в котором формируется сигнал, воздействующий на регулятор 14, управляющий приводом 15 вариатора 7 в кинематической цепи привода ленточного питателя. При работе в цикличном режиме сигнал с умножителя поступает в интегрирующий блок 12 и далее в блок задатчика дозы 11. По достижении заданного значения поданной массы материала регулятор 10 отключает двигатель 9 привода питателя. Для дозирования жидкостей в установках небольшой производительности применяют компактные дозаторы турбинного типа на базе расходомеров воды, которые могут работать как в цикличном, так и в непрерывном режимах. Смесители В зависимости от вида приготовляемой смеси смесители подразделяют на растворосмесители - для приготовления штукатурных, кладочных, отделочных и других растворов и бетоносмесители - для приготовления бетонных смесей: обычных, сухих, ке-рамзитобетонных, ячеистых, особо тяжелых и др. Смесители могут быть стационарными для работы в составе бетоносмесительных установок, заводов сборных железобетонных изделий (ЖБИ) и комбинатов крупнопанельного домостроения, перебазируемыми для объектов с небольшими объемами работ и мобильными (авторастворосмесители, автобетоносмесители). По режиму работы смесители могут быть цикличными и непрерывного действия. В цикличных смесителях исходные компоненты смешиваются отдельными порциями. Их главным параметром является вместимость смесительного барабана (по объему исходных компонентов). Отечественная промышленность выпускает бетоносмесители вместимостью 100...4500л и растворосмесители вместимостью 40...1500 л. В смесителях непрерывного действия исходные компоненты поступают непрерывно, также непрерывно выдается готовая смесь. Для приготовления смесей с различной рецептурой и частой сменой рецептов более приспособлены цикличные смесители. Их применяют на растворобетонных установках, заводах ЖБИ и в домостроительных комбинатах. Смесители непрерывного действия применяют в дорожном и энергетическом строительстве с ограниченным числом рецептов смеси (не более трех). По принципу смешивания компонентов смесители подразделяют на гравитационные, принудительные и гравитационно-принудительные. Первые два типа могут быть как цикличного, так и непрерывного действия. Наибольшее распространение в строительстве получили как гравитационные бетоносмесители цикличного действия, так и принудительные. В гравитационных смесителях рабочим органом является смесительный барабан с наклонной или горизонтальной осью вращения. Гравитационный бетоносмеситель с наклонной осью вращения (рис.167, а) состоит из установленного на опорных стойках 4 смесительного барабана 7 с лопастями на его внутренней поверхности, приводимого во вращение электродвигателем 2 через систему зубчатых передач с конечной кинематической парой шестерня 5 — зубчатый венец 6 (рис.167, б), охватывающий барабан. Для загрузки барабан устанавливают пневмоцилиндром 3 в слегка наклонное положение горловиной вверх. В таком же положении он находится во время смешивания компонентов. Для разгрузки барабана его опрокидывают тем же пневмоцилиндром. Исходные компоненты, загружаемые в смесительный барабан скиповым подъемником, смешиваются в барабане при его вращении лопастями, которые поднимают смесь на некоторую высоту, откуда она падает вниз, подхватывается другими лопастями и т.д. После перемешивания в течение 60...90 с готовую смесь выгружают из барабана, для чего его опрокидывают без остановки вращения. Продолжительность полного рабочего цикла, включающего загрузку исходных компонентов, их перемешивание и выгрузку готовой смеси, составляет 90...150 с. Гравитационные смесители отличаются простотой устройства и обслуживания, способностью приготавливать смесь с крупными (до 120...150 мм) заполнителями. Смесители принудительного действия с вращающимися лопастными валами применяют для приготовления бетонных смесей и растворов практически любой подвижности и жесткости с крупностью заполнителя не более 70 мм. Различают смесители с вертикальными и горизонтальными лопастными валами. В настоящее время широкое распространение получили роторные смесители с вертикальными валами, работающие с повышенными скоростями движения рабочих органов.
Эти машины особенно рекомендуется применять для приготовления жестких смесей. В роторный смеситель (рис.168) сухие компоненты подают через загрузочный патрубок 3, а воду - по кольцевой перфорированной трубе 4. Смесь перемешивается лопастями 12, установленными на державках 13 кронштейнов 2, в кольцевом пространстве, ограниченном внешней обечайкой 7 смесительной чаши и внутренним стаканом 10, футерованными сменными износостойкими плитами 11. Несколько таких кронштейнов закреплены на траверсе 9, вращение которой передается от электродвигателя 6 через редуктор 5. Разгружают готовую смесь через секторный затвор 8, управляемый пневмоцилиндром 7. Цикличные смесители с горизонтальным лопастным валом и турбулентные смесители применяют для приготовления строительных растворов.
В смесителях первого типа (рис.169) смесь перемешивается двумя винтовыми лопастями 3, установленными на валу 4, приводимом в движение от электродвигателя 2 через ременную передачу 1 и редуктор 5. Разгружают готовую смесь через затвор 6, управляемый пневмоцилиндром 7. В турбулентный растворосмеситель (рис.170) компоненты загружают через горловину в верхней части корпуса 1. При вращении лопастного ротора, приводимого в движение электродвигателем 2, перемешиваемые материалы совершают многократные перемещения в конической периферии корпуса, поднимаясь вверх по ней и оседая в центральной части. Разгружают готовый раствор через люк 3 при открытом затворе 4. Производительность смесителей цикличного действия П = VzkВkИ, где П - производительность смесителей цикличного действия, м3/ч; V — вместимость смесителя по загрузке, м3; z — число замесов в час; kВ — коэффициент выхода смеси ( kВ = 0, 75...0, 85); kИ ‑ коэффициент использования смесителя во времени.
Смесителями непрерывного действия комплектуют бетоно- и растворосмесительные установки производительностью до 30 м3/ч. В горизонтальном двухвальном смесителе (рис.171) компоненты смеси непрерывным потоком подают в корыто 8, в котором вращаются навстречу друг другу валы 6 с закрепленными на них лопастями 7, установленными под углом 40...45° к оси вала для перемещения смеси в процессе ее перемешивания к разгрузочному затвору 5. Валы приводятся во вращение электродвигателем 1 через ременную передачу 2, редуктор 3 и зубчатую пару 4. Техническая производительность смесителей непрерывного действия определяется объемом смеси, перемещаемым в единицу времени в осевом направлении, и зависит от размера лопастей, угла их установки и частоты их вращения.
Классификация датчиков По назначению - силовые,, скоростные, температурные и др. (табл.2): По принципу действия- механические, электрические, тепловые, акустические, оптические, радиоактивные. По способу преобразования неэлектрических величин в электрические - активные (генераторные) и пассивные (параметрические). В генераторных датчиках энергия входного сигнала преобразуется (без участия вспомогательных источников энергии) в электрическую энергию выходного сигнала (ток, напряжение, электрический заряд). В параметрических датчиках под действием входного сигнала изменяется какой-либо собственный параметр датчика (емкость, сопротивление, индуктивность). При этом схема включения таких датчиков всегда имеет внешний источник питания. По конструкции и принципу действия чувствительного элемента датчики подразделяют на контактные и бесконтактные. При этом в контактных датчиках чувствительный элемент взаимодействует непосредственно с контролируемым объектом, а в бесконтактных это взаимодействие отсутствует. К последним относятся фотоэлектрические, ультразвуковые, радиоактивные и специальной конструкции щуповые датчики. Работа датчиков определяется их статическими, динамическими и частотными характеристиками и оценивается величиной входных и выходных сигналов, чувствительностью, инерционностью и погрешностью. Так как измерение одной и той же физической величины может выполняться с помощью различных датчиков, то их выбор должен обеспечить технические требования, предъявляемые к разрабатываемой системе автоматики технологическим процессом, конструкцией и спецификой эксплуатации машины. Рассмотрим основные разновидности датчиков, используемых в строительных и дорожных машинах и оборудовании.
К простейшим устройствам относятся конечные выключатели, ограничивающие линейные или угловые перемещения механизма. В первом случае, например, (рис.176, а) при достижении машиной (башенным, козловым, мостовым кранами) во время перемещения по подкрановым путям крайнего положения, линейка ограничителя 2 нажимает рычаг 1 конечного выключателя и, перемещая его, отключает контактную группу 3, прерывая подачу электроэнергии к механизму передвижения.Во втором случае (рис.176, б) перемещение и укладка каната на барабане грузоподъемной машины производится с помощью шпиндельного выключателя. Он состоит из ходового винта 1, установленного в опорах и соединенного с приводом барабана зубчатой или цепной передачей 3. При вращении винта гайка 2 с удерживаемым канатом перемещается вдоль него в одну иди другую сторону, до момента наезда на переключатели 4, в результате чего происходит отключение управляющей цепи и последующее включение с направлением движения в обратную сторону.
В автоматических системах широко используются и микропереключатели(рис.177). Они состоят изкорпуса. 3, в котором закреплены пластины неподвижных замыкающего 1 и размыкающего 2 контактов, а также подвижного контакта 5 и работающая совместно с ним фигурная пружина 4. Толкатель 7 оснащен возвратной пружиной б и приводится в движение рабочим органом, положение которого контролируется, при достижении им конечного положения. При этом второй контакт обычно используется для включения механизма реверса. Из генераторных преобразователей наибольшее распространение имеют резистивные преобразователи неэлектрических величин, действие которых основано на изменении омического сопротивления от воздействия изменяемой величины. К таким преобразователям относятся различные конструкции потенциометрических датчиков, преобразующих линейные и угловые перемещения в электрический сигнал. Они выполняются в виде переменного сопротивления, т.е. представляют различные конструкции реостатов, подвижный контакт которых связан с преобразуемым элементом.
Эти преобразователи состоят из каркаса прямоугольного, круглого или кольцевого сечения (рис.178, а, б), изготовленного из керамики, пластмасс или алюминия, покрытого токонепроводящим лаком. На каркас может наматываться эмалированная или оксидированная и покрытая лаком проволока из константана, нихрома, манганина, а также нанесен слой полупроводника или металлической пленки. Подвижная токосъемная щетка скользит по зачищенной контактной дорожке (непосредственно по проволоке или по соединенным с ней контактам). Наряду с рассмотренными преобразователями при измерении углов наклона конструкций и рабочих органов строительных машин используются также и преобразователи, в которых высокоомное сопротивление шунтируется ртутью или проводящей жидкостью (рис.178, в). При необходимости получения нелинейной характеристики в системах автоматики применяются линейные преобразователи с шунтирующими сопротивлениями (рис.178, г), а также функциональные преобразователи с профилированным или ступенчатым каркасом, позволяющим получать переменные резисторы с квадратичной, логарифмической или другой функциональной зависимостью.
При значительных изменениях давлений, а также для измерений деформаций в элементах конструкций и узлов машин используются тензометрические и пьезоэлектрические преобразователи. Их работа основана на явлении тензометрического эффекта, т.е. на изменении электрического сопротивления чувствительного элемента от его деформации. В качестве чувствительных элементов, называемых тензолитами, в датчиках используются стержни из порошка сажи, графита или угля, наклеенные на полоске бумаги 2 (рис.179, а). Однако наибольшее распространение получили датчики с проволочными элементами из константана, нихрома или фольги. Проволока диаметром, 0, 02...0, 05мм или фольга 1 с медными выводами 3 наклеивается в виде прямоугольных или кольцевых петель на бумагу или пленку из изоляционного материала 2 (рис.179, б, в, г). Тензопреобразователи приклеиваются на поверхность детали 4, деформация которой измеряется, и с помощью соединительных проводов подключается к измерительному электрическому мосту. Схема подключения зависит от количества тензодатчиков и вида измеряемой деформации (растяжение, сжатие, изгиб, кручение). При этом, если деталь или конструкция сжимается или Растягивается, то вместе с ней деформируются и наклеенные датчики, изменяющие величину своего сопротивления. Тензодатчики обычно включаются по мостовой схеме. В последнее время широкое применение получили тензодатчики
полупроводниковые из германия и кремния, чувствительность которых в 50...100 раз выше проволочных, а значительный уровень выходного сигнала позволяет обходиться без усилительной аппаратуры. Однако они имеют и существенные недостатки, одним из которых является значительно пониженные температурные характеристики. С помощью пьезоэлектрических преобразователей механическая энергия преобразуется в электрическую в связи с возникновением электрических зарядов на поверхностях кристаллов некоторых диэлектриков (например, титаната бария)
при механическом воздействии на них. Пьезоэлектрический датчик усилий (рис.180) представляет собой корпус 1, в котором расположены пьезоэлектрические пластины 2. Усилия Р передаются на пластины через опорные плиты 4, а полученный сигнал снимается с металлических обкладок. К этому же типу датчиков относятся металлические и полупроводниковые термометры сопротивления, предназначенные для измерения температуры в диапазоне от -50 до +180°С для медных и от -250 до +650°С для платиновых термометров сопротивления. В параметрических датчиках, представляющих индуктивные и емкостные преобразователи, питание осуществляется от переменного тока. Принцип работы этих преобразователей основан на изменении реактивного сопротивления в зависимости от величины зазора между неподвижной и подвижной частями. Имеется много различных конструкции индуктивных преобразователей. Наибольшее распространение получили преобразователи с подвижным якорем (рис.181, а) и соленоидного типа (рис.181, б). Они используются для измерения небольших линейных и угловых перемещений, деформаций и в управлении следящими системами. Преобразователь состоит из магнитопровода 2 с обмоткой 1 и якоря 3 соединенного с рабочим органом машины или. ОГП кранов. Изменение воздушного зазора δ , представляющего входную величину, изменяет, в свою очередь, индуктивность и сопротивление обмотки дросселя. При этом увеличение зазора уменьшает индуктивность и сопротивление обмотки и ведет к увеличению тока. Дифференциальные трансформаторы с подвижным сердечником используются в основном в электрических измерительных преобразователях с силовой
компенсацией в качестве индикатора рассогласования. Такой преобразователь представляет цилиндрический каркас с перемещающимся сердечником. По всей длине каркаса навита первичная обмотка W1, поверх которой симметрично расположены две вторичные обмотки W1′ и W2" , выполненные в виде двух одинаковых катушек. Индикатор уровня типа ДИУ-СЧА (рис.182, а) устроен и работает следующим образом. Сердечник 1, перемещающийся внутри катушек с обмотками, связан посредством жесткой тяги 3 с поплавком 4, находящимся в баке 5 с контролируемой жидкостью. Для уравновешивания выталкивающей силы при изменении уровня жидкости и соответствующего перемещения подлавка и сердечника служит пружина 2. При положении сердечника в средней части трансформатора во вторичных обмотках индуктируются одинаковые электродвижущие силы (ЭДС) и разность потенциалов Δ U на выходе трансформатора равна нулю. Перемещение сердечника вверх вызывает увеличение ЭДС индуктируемой в обмотке W2’, ее уменьшение в обмотке W2" и появление сигнала Δ U на выходе, значение которого фиксируется прибором КСД-3. Работа широко используемого поворотно-трансформаторного датчика (рис.182, б) состоит в изменении индукции в обмотках датчика W1 при угловом перемещении сердечника (ротора) с обмоткой WВ, соединенного с поворотным устройством машины. На обмотку возбуждения WВ подается входное напряжение Uвх , а с обмоток W1 снимается выходное напряжение Uвых. При фиксированном установочном положении ротора ЭДС в обмотках W1 равны между собой и Uвых = 0. После перемещения ротора в обмотках W1 создаются различные значения ЭДС и происходит изменение напряжения Uвых от минимального до максимально возможного (при α мах=90°). Тахогенераторы представляют собой маломощные (до 100Вт) электрические машины переменного или постоянного тока для преобразования скорости механического вращения в электрический сигнал. Тахогенератор переменного тока (рис.183., а) состоит из ряда расположенных на статоре 1 обмоток 2, соединенных между собой последовательно. Ротор 3 является постоянным магнитом и выполняется в виде
специальной звездочки или стержня с числом полюсов, равным числу обмоток. Тахогенератор постоянного тока (рис.183, б) является аналогичным генератором с независимым возбуждением от постоянных магнитов 2, установленных в статоре 1. В пространстве между полюсами магнита вращается якорь генератора с обмоткой, с контактной дорожки которого с помощью щеток снимается значение ЭДС. На выходе с тахогенераторов снимается напряжение, пропорциональное частоте вращения. Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 854; Нарушение авторского права страницы
 Рис.160. Принцип работы паровоздушных молотов одиночного (а и б) и двойного (в и г) действия
Рис.160. Принцип работы паровоздушных молотов одиночного (а и б) и двойного (в и г) действия
 Рис.161. Дизель-молоты:
а ‑ штанговый; б - трубчатый
Рис.161. Дизель-молоты:
а ‑ штанговый; б - трубчатый
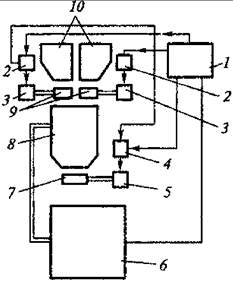 Рис.164. Функциональная схема весового дозатора цикличного действия
Рис.164. Функциональная схема весового дозатора цикличного действия
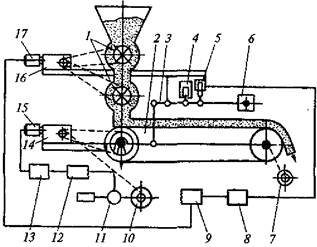 Рис.165. Схема дозатора непрерывного действия для цемента
Рис.165. Схема дозатора непрерывного действия для цемента
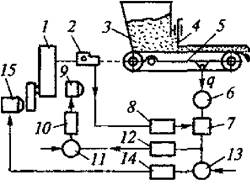 Рис.166. Схема универсального дозатора для заполнителей
Рис.166. Схема универсального дозатора для заполнителей
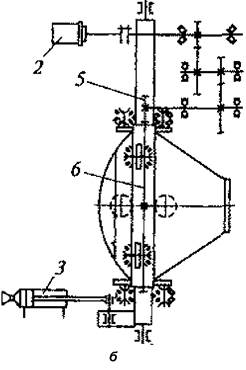
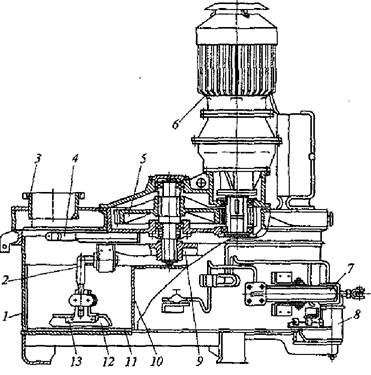 Рис.168. Роторный смеситель
Рис.168. Роторный смеситель
 Рис.169. Растворосмеситель с винтовыми лопастями
Рис.169. Растворосмеситель с винтовыми лопастями
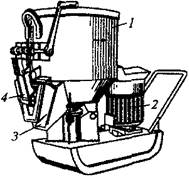 Рис.170. Турбулентный растворосмеситель
Рис.170. Турбулентный растворосмеситель
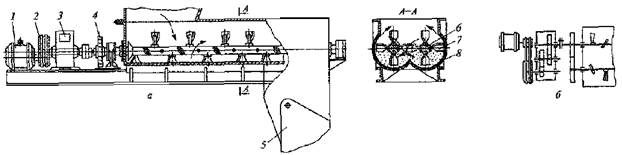 Рис.171. Горизонтальный двухвальный смеситель непрерывного действия (а) и кинематическая схема его привода (б)
Рис.171. Горизонтальный двухвальный смеситель непрерывного действия (а) и кинематическая схема его привода (б)
 Рис.176. Конечные выключатели
Рис.176. Конечные выключатели
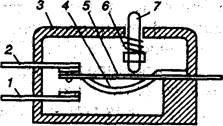 Рис.177. Микропереключатель
Рис.177. Микропереключатель
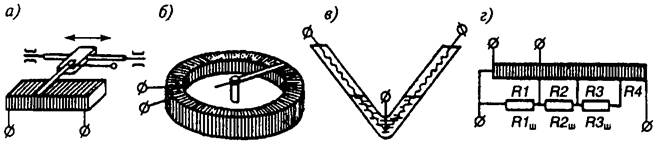 Рис.178. Реостатные преобразователи
Рис.178. Реостатные преобразователи
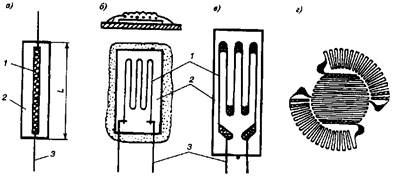 Рис.179. Тензометрические преобразователи
Рис.179. Тензометрические преобразователи
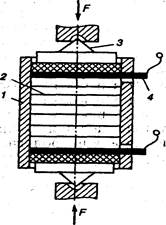 Рис.180. Пьезоэлектрический преобразователь
Рис.180. Пьезоэлектрический преобразователь
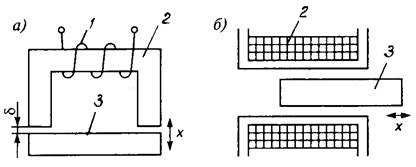 Рис.181. Простые индуктивные преобразователи
Рис.181. Простые индуктивные преобразователи
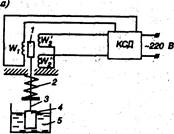
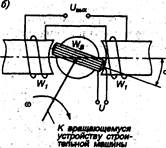 Рис.182. Дифференциальные трансформаторы с подвижным сердечником
Рис.182. Дифференциальные трансформаторы с подвижным сердечником
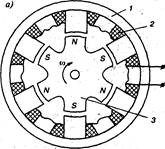
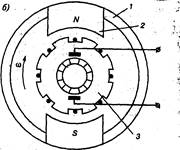 Рис.183. Тахогенераторы
Рис.183. Тахогенераторы