|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ.Стр 1 из 5Следующая ⇒
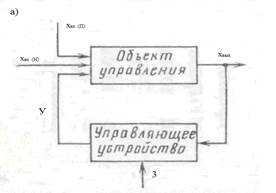
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ. СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Под управлением технологическим процессом понимается совокупность операций, необходимых для осуществления таких целей, как пуск и остановка технологического процесса, поддержание какого-либо параметра процесса на заданном уровне, изменение параметра по заданной программе и т.п. Установку, машину, агрегат, в котором протекает исследуемый технологический процесс, называют объектом управления. Управление может быть ручным или автоматическим. В первом случае операции управления осуществляет человек, а во втором – управляющее устройство. Сочетание объекта управления и управляющего устройства образует систему автоматического управления (САУ).
Рис.11.1. К понятию системы автоматического управления На работу системы автоматического управления влияют различные воздействия. Будем называть их входными воздействиями, входными величинами или просто входами ( xвх) (рис.11.1). Параметры процесса, которые в той или иной степени характеризуют его качество и изменяются под действием входных величин, будем называть выходными величинами или просто выходами (xвых). Входные воздействия, которые нарушают заданный закон изменения выходных величин, будем называть возмущающими воздействиями или просто возмущениями. Возмущения можно подразделить на два вида: нагрузку (Н) и помехи (П). Изменение нагрузки обычно обусловлено технологическим процессом, а помехи вызываются изменениями внешних условий (например, температуры окружающей среды) или свойств отдельных элементов системы. Воздействие управляющего устройства на объект управления называется управляющим воздействием (У). Оно также относится к входным воздействиям. ОБРАТНЫЕ СВЯЗИ. При построении системы автоматического управления широко применяют обратные связи. Обратную связь называют внешней, если она соединяет выход системы с ее входом, и внутренней или местной, если она соединяет выход одного или группы элементов системы с их входом. Если подача выходной величины элемента системы на его вход усиливает действие входной величины на выходную, то такая обратная связь называется положительной. Обратная связь называется отрицательной, если подача выходной величины элемента системы на его вход ослабляет действие входной величины на выходную. По характеру передачи воздействий обратные связи делятся на жесткие и гибкие. Жесткая связь действует как в установившемся, так и в переходном режиме, гибкая действует только в переходном режиме, а в установившемся режиме ее действие прекращается.
РАЗОМКНУТЫЕ И ЗАМКНУТЫЕ САУ. Системы автоматического управления делятся на разомкнутые и замкнутые. Разомкнутыми называются такие системы автоматического управления, в которых отсутствует внешняя обратная связь и, следовательно, отсутствует контроль результата управления. В разомкнутой САУ с жесткой программой(рис.11.2, а) на управляющее устройство подается жесткое задание З. Управляющее устройство оказывает воздействие У на объект управления в соответствии с этим заданием. Под действием некоторого возмущенияxвх (например, изменение нагрузки) могут возникнуть отклонения выходной величиныxвых объекта от задания. Однако эти отклонения в разомкнутой САУ с жесткой программой не контролируются и не влияют на работу управляющего устройства.
Рис.11.2. Разомкнутые системы автоматического управления (САУ) К таким системам относятся, например, системы автоматического пуска и остановки насосов, вентиляторов, компрессоров и т.п. Замкнутыми называют системы автоматического управления, в которых имеется обратная связь, обеспечивающая контроль выходной величины (рис.11.3, а). При этом управляющее устройство формирует управляющее воздействие У в зависимости от отклонения входной величины xвых от задания З.
Рис.11.3.Замкнутая по отклонению (а) САУ РЕГУЛЯТОР Приведем основные понятия и определения, используемые при изучении систем регулирования. Параметр, который необходимо регулировать в ходе технологического процесса, называется регулируемым. Значение регулируемого параметра в любой момент времени называется текущим, а то его значение, которое необходимо поддерживать в процессе, - заданным. Разность между текущим и заданным значением регулируемого параметра называется рассогласованием или отклонением.
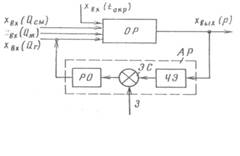
Рис.11.5.Функциональная схема системы регулирования давления Основные элементы регулятора – чувствительный элемент, который реагирует на изменение регулируемого параметра, элемент сравнения, который сравнивает текущее значение регулируемого параметра с заданным, устанавливаемым с помощью специального устройства, и регулирующий орган, который оказывает непосредственное воздействие на процесс. В нашем примере система автоматического регулирования будет действовать следующим образом (рис.11.4, б). В случае появления возмущающего воздействия, например при увеличении расхода потока смеси на входе (Qсм), давление в сепараторе (регулируемый параметр) повысится. Автоматический регулятор, сравнивая воздействия на мембрану 1 (элемент сравнения) со стороны давления газа (текущее значение) и со стороны пружины 2 (заданное значение), будет осуществлять регулирующее воздействие, увеличивая проходное сечение регулирующего органа 3 и тем самым уменьшая рассогласование. В этой системе мембрана 1 выполняет также функцию чувствительного элемента. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К САР Если текущее значение регулируемого параметра равно заданному, то считается, что система находится в состоянии равновесия. Если под действием какого-либо возмущения в системе возникло отклонение регулируемого параметра, то ей необходимо некоторое время, чтобы снова прийти в состояние равновесия. Считается, что в течение этого времени система находится в переходном режиме.
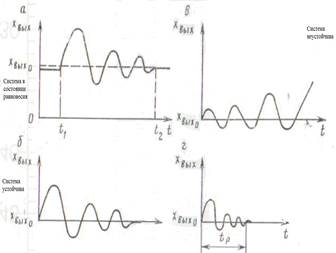
Рис.11.7. Графики переходных процессов в САР Поведение системы в переходном режиме принято изображать в виде графика переходного процесса – зависимости изменения во времени выходной величины (регулируемого параметра) системы (рис.11.7, а). Текущее значение регулируемого параметра на графике обозначено через хвых, и его изменение показано сплошной линией. Так как мы рассматриваем системы стабилизации, то заданное значение хвых0, остается постоянным, чему соответствует пунктирная линия, параллельная оси времени. Совпадение кривых текущего и заданного значений на отрезке времени 0-t, свидетельствует о том, что в этот период система находится в состоянии равновесия. В момент времени t1, под действием возмущения система отклоняется от состояния равовесия и вновь к нему возвращается под действием регулятора к моменту времени t2. В период времени t1-t2 система находится в переходном режиме, а после t2- снова в состоянии равновесия. При исследовании систем принято их рассматривать начиная от момента появления отклонения регулируемого параметра. В этом случае начало координат соответствует заданному значению регулируемого параметра (рис.11.7, б). Однако переходный процесс может иметь другой характер (рис.11.7, в). Сравнивая два графика переходного процесса (рис.11.7, б, в), можно увидеть, что в одном случае система возвращается к состоянию равновесия, а в другом этого не происходит. Считают, что в первом случае система устойчива, а во втором – неустойчива. Так как назначением САР является поддержание регулируемого параметра на заданном значении, то естественно потребовать, чтобы она обеспечивала переходный процесс в соответствии с графиком, приведенным на рис.11.7, б, т.е. была бы устойчивой. Вместе с тем и в устойчивых САР переходный процесс может протекать различно (рис.11.7, г). При этом вводится понятие качества переходного процесса, которое характеризуется рядом показателей. Одним из них является, например, время переходного процесса tp. Естественно, чем меньше это время, тем выше качество САР. Численное значение показателя качества, которое должна обеспечить САР, выбирается исходя из технологических соображений. Таким образом, к системе автоматического регулирования предъявляются два требования: 1) система обязательно должна быть устойчивой и 2) обладать определенным заданным качеством.
Классификация манометров По принципу действия манометры можно разделить на следующие группы: Жидкостные манометры – в которых измеряемое давление или разность давлений уравновешивается давлением столба жидкости. Грузопоршневые манометры – в которых измеряемое давление или разность давлений уравновешивается давлением, создаваемым весом поршня и грузов. Деформационные манометры - – в которых измеряемое давление или разность давлений определяется по деформации упругого чувствительного элемента. Электрические манометры – принцип действия которых основан на зависимости электрических параметров манометрического преобразователя от измеряемого давления. Жидкостные и поршневые манометры применяют преимущественно для поверки и градуировки приборов, измеряющих давление, а также при лабораторных исследованиях.
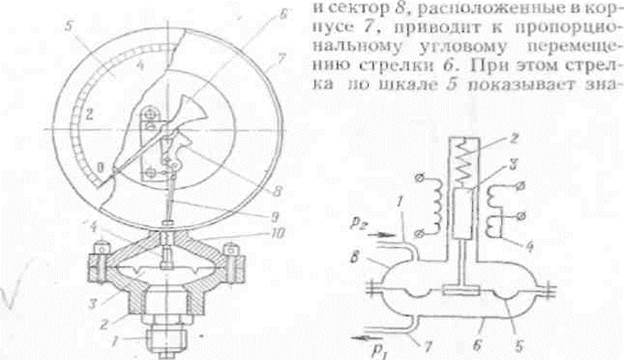
Мембранные манометры В мембранном манометре упругим чувствительным элементом является мембрана (упругая пластина) или мембранная коробка. Устройство мембранного манометра показано на рис. 7.3. Давление, подаваемое на штуцер 1, действует на мембрану 3, и зажатую между крышками 2 и 10 корпуса. Под действием давления мембрана прогибается, и прогиб ее через толкатель 4, рычаг 9 и сектор 8, расположенные в корпусе 7, приводит к пропорциональному угловому перемещению стрелки 6. При этом стрелка по шкале 5 показывает значение измеренного давления.
Рис. 7.3. Мембранный манометр Рис. 7.4. Дифманометр с вялой мембраной
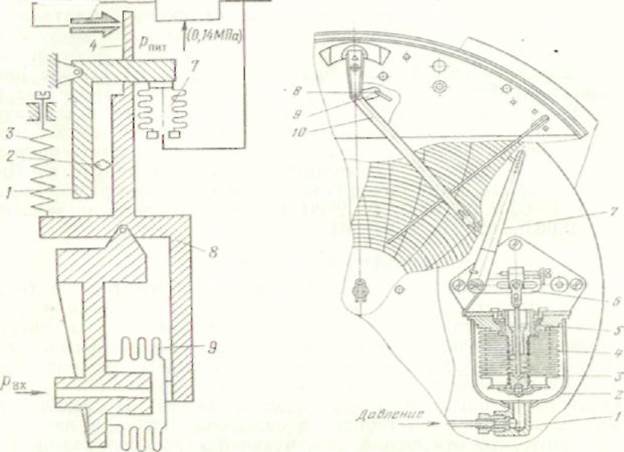
Снльфонный манометр. Принцип действия прибора основан на пневматической силовой компенсации. Измеряемое давление или разрежение действует на сильфон 9.
Сильфонный тягонапоромер ТНС-П Сильфонный самопишущий манометр и передается рычагу 8, который перемещает заслонку 4относительно сопла 5. При этом давление на выходе пневмоусилителя 6 изменяется и с выхода поступает в линию дистанционной передачи и на сильфом обратной связи 7. Усилие обратной связи, действуя через рычаг 1 и сухарик 2 на рычаг 8, держит заслонку 4 относительно сопла 5 на расстоянии, соответствующем значению измеряемого параметра. Таким образом, давление на выходе пневмоусилителя будет соответствовать значению измеряемого параметра. Регулировка прибора осуществляется перемещением сухарика 2 вдоль рычагов 1 и 8. Настройка нулевого значения выполняется пружиной 3. На рис. 7.9 показано устройство сильфонного самопишущего манометра. Давление через штуцер / подается в камеру 2, где находится сильфон 4. Внутреннее пространство сильфона сообщается с атмосферой. Внутри сильфона расположена пружина 3, противодействующая сжатию его. В дно сильфона упирается штифт 5, соединенный с рычагом 6, передающим движение от сильфона к рычагу 7. Рычаг 7 тягой 8 соединен с рычагом 9, передающим движение стрелке 10 с укрепленным на ней пером. Классификация термометров Приборы для измерения температуры подразделяются на следующие виды: 1. Термометры расширения, в которых используется изменение объема или линейного размера тел при измерении температуры: - жидкостные (стеклянные) - основанные на тепловом расширении тел. - деформационные (дилатометрические) - основанные на разности коэффициентов линейного расширения твердых тел. - биметаллические – имеющие чувствительные элементы в виде пружин различной формы из двух металлов с разными коэффициентами расширения. 2. Манометрические термометры – основанные на свойстве жидких и газообразных веществ, заключенных в замкнутом объеме, изменять свое давление при изменении температуры. 3. Термометры сопротивления – основанные на свойстве металлов и сплавов в зависимости от температуры изменять электрическое сопротивление. 4. Термоэлектрические термометры – основанные на термоэлектрическом эффекте – свойстве двух разнородных проводников, одни концы которых электрически соединены, под влиянием теплового воздействия на спай создавать на противоположных концах ЭДС, т.е. термопары.
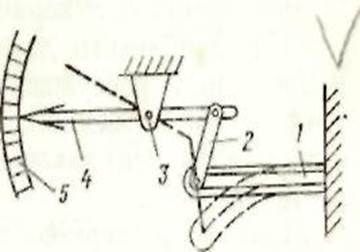
Биметаллические термометры
Чувствительный элемент биметаллического термометра представляет собой пружину, состоящую из двух, спаянных по всей плоскости пластин, имеющих существенно различные термические коэффициенты линейного расширения. Изменение температуры вызывает различное линейное удлинение пластин. Так как пластины не могут перемещаться относительно друг друга, пружина прогибается в сторону пластины, имеющей меньший термический коэффициент линейного расширения. Чем больше разница термического коэффициента линейного расширения пластин, тем больший прогиб пружины при изменении температуры. При изменении температуры биметаллическая пружина 1 прогнется вниз. При этом тяга 2 повернет стрелку 4 вокруг оси 3. Стрелка покажет но шкале 5 значение измеренной температуры.
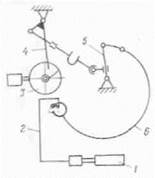
Манометрический термометр
Капилляр 2 изготовляется из бесшовной стальной или медной трубки внутренним диаметром 0, 1—0, 5 мм. Длина капилляра может изменяться от нескольких сантиметров до десятков метров в зависимости от расстояния между местом измерения и вторичным прибором. Вторичным прибором служит манометр с трубчатой одновитковой или многовитковой пружиной 6. Перемещение свободного конца пружины с помощью передаточного механизма 5 преобразуется в перемещение пера 4 на диаграмме 3.
Объемный счетчик СВШ
На рисунке показана схема работы объемного счетчика СВШ с овальными шестернями. Шестерни размещены внутри пустотелого закрытого корпуса на двух параллельных осях. Ось одной из шестерен вращает счетный механизм, расположенный снаружи крышки. Поверхности шестерен должны возможно ближе прилегать к поверхности корпуса, так как от этого зависит точность измерения. При протекании жидкости через измерительную камеру под действием разности давлений на входе и выходе возникает вращающий момент, обусловленный овальной формой шестерен. При каждом обороте шестерни подают определенный объем жидкости из входной полости камеры в выходную. Следовательно, объемное количество жидкости, протекающей через счетчик, равно произведению измерительного объема камеры на число оборотов шестерен. Таким образом, измерение объема жидкости сводится к измерению числа оборотов. За время одного рабочего цикла из измерительной камеры вытесняются четыре серпообразных объема (заштрихованы), которые и составляют измерительный объем камеры. Такие счетчики выпускаются для измерения объема воды, легких нефтепродуктов и масел. В последнее время их применяют на нефтяных промыслах для измерения нефти, добываемой из скважин. Калибр выпускаемых счетчиков от 12 до 250 мм, предел измерения от 0, 01 до 250 м3/ч. Погрешность измерения ±0, 5— 1, 0%. Классификация уровнемеров По назначению приборы делятся на: - сигнализаторы, контролирующие предельное значение уровня, - уровнемеры, непрерывно измеряющие значение уровня - измерители раздела двух сред.
По принципу действия: - механические (поплавковые) - пьезометрические (манометрические) - электрические (кондуктометрические, емкостные) - Акустические (ультразвуковые)
Уровнемер УДУ-5
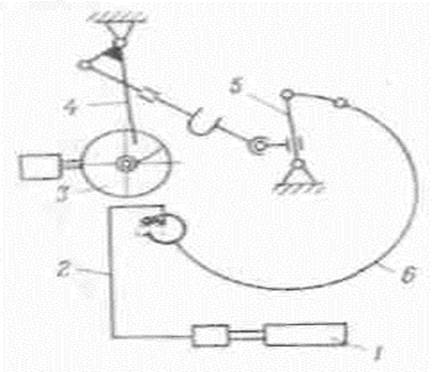
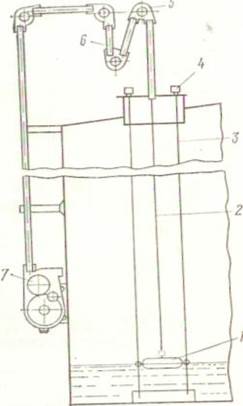
Схема прибора УДУ-5, являющегося основной базовой конструкцией, показана на рисунке. Поплавок 1 уровнемера, подвешенный на перфорированной мерной ленте 2, при своем движении скользит вдоль направляющих струн 3. Струны жестко закреплены на днище резервуара и натянуты натяжными гайками 4, установленными на крышке верхнего люка резервуара. Лента по роликам 5 проходит через гидрозатвор 6 и вращает мерный шкив 7. Последний вращает механизм счетчика, показания которого соответствуют уровню нефтепродукта в резервуаре. Уровнемер УДУ-5 предназначен для измерения уровня однородных взрывоопасных и невзрывоопасных, агрессивных (с агрессивностью, не превышающей агрессивность сернистой нефти) и неагрессивных, электропроводных и неэлектропроводных жидкостей в резервуарах промышленного назначения.
АКУСТИЧЕСКИЕ УРОВНЕМЕРЫ В акустических уровнемерах уровень определяется по времени прохождения ультразвуковых волн от излучателя до уровня жидкости. В акустических уровнемерах обычно используется принцип отражения звуковых волн от границы раздела жидкость—газ (воздух). Блок-схема ультразвукового уровнемера показана на рисунке. В комплект прибора входят пьезоэлектрические излучатели 3, электронный блок 1 и вторичный прибор 11. Электронный блок состоит из генератора 1, задающего частоту повторения импульсов, генератора 2импульсов, посылаемых в измеряемую среду, приемного усилителя 4, измерителя времени 5. Генератор 1 управляет работой генератора 2и схемой измерения времени. Генератор 2формирует короткие импульсы для возбуждения пьезоэлектрического излучателя 3. Электрический импульс, преобразованный с помощью пьезоэлектрического излучателя в ультразвуковой, распространяется в жидкой среде, отражается от границы раздела жидкость—воздух и возвращается обратно, воздействуя на приемный излучатель, где снова преобразуется в электрический импульс.
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ. Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1198; Нарушение авторского права страницы