|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Классификация и индексация строительных машин (лабораторная работа №1, часть 1)Стр 1 из 6Следующая ⇒
Оглавление Введение 4 1. Классификация и индексация строительных машин 5 1.1. Классификация строительных машин 5 1.1.1. Указания к заполнению классификационной таблицы, приведенной в лабораторной работе №1 7 1.2. Индексация строительных машин 11 2. Основные части строительных машин 11 2.1. Приводы строительных машин 12 2.1.1. Силовое оборудование 14 2.1.2. Трансмиссии строительных машин 16 2.2. Ходовое оборудование 36 2.3. Управление машинами 40 3. Маневренность и проходимость машин 43 3.1. Способы и радиусы поворота 43 3.2. Геометрия поворота тяговой машины с прицепом 44 3.3. Ограничение тягового усилия по сцеплению 45 3.4. Сопротивление движению 45 3.5. Проходимость машины по грунту 46 4. Лабораторные упражнения и контроль усвоения материала 46 Библиографический список 47
Введение При производстве строительных работ используется большое количество разнообразных машин, механизмов и оборудования, состоящих из сборочных единиц, представляющих собой совместно работающие детали. Основными требованиями, предъявляемыми к деталям, являются простота их форм, экономичность (невысокая стоимость материала, незначительные затраты на изготовление и эксплуатацию) и надежность (сохранение в течение длительного времени своей работоспособности). Работоспособность определяют как по отдельным, так и по совместным показателям: прочности, износостойкости, теплостойкости, жесткости, устойчивости и виброустойчивости. Главным из них для большинства деталей является прочность – свойство детали сопротивляться изменению формы (разрушению) под воздействием внешних нагрузок. Определенные требования предъявляются также к сборочным единицам и к самим машинам. Основные требования, характеризующие качества строительных и дорожных машин, представлены такими показателями, как назначение, надежность, стандартизация, унификация, безопасность, технологичность, транспортабельность, экологичность, эргономичность, экономичность. На первом этапе, для успешного освоения цикла лабораторных работ, предусмотренных программой курса «Технология, механизация и автоматизация железнодорожного строительства», необходимо ознакомиться с известными классификациями строительных машин, их индексацией, конструктивными схемами. Методические указания содержат необходимую информацию, касающуюся данных вопросов, и будут способствовать успешному выполнению и защите лабораторных работ № 1, 2 и 3, представленных в «Сборнике лабораторных работ» указанного выше курса.
Классификация и индексация строительных машин (лабораторная работа №1, часть 1)
Цель работы: ознакомление с известными классификациями строительных машин, их индексацией, основными конструктивными элементами. Машиной называют устройство, выполняющее предусмотренную работу за счет преобразования энергии. Машины делятся на информационные, энергетические и рабочие. Информационные машины предназначены для переработки информации. К ним относятся, например, вычислительные машины. Энергетические машины преобразуют в механическую другие виды энергии. Иначе их называют двигателями. Известны электрические, тепловые, гидравлические и ряд других типов двигателей. Рабочие машины предназначены для выполнения механической работы. К их разряду относятся, в частности, строительные машины. Индексация строительных машин На все выпускаемые в нашей стране строительные машины распространяется единая система индексации, в соответствии с которой каждой машине разработчиком присваивается индекс (марка), содержащий буквенное и цифровое обозначение. Основные буквы индекса, располагаемые перед цифрами, обозначают вид машины. Например, буквенная часть индекса одноковшовых строительных экскаваторов содержит буквы ЭО, экскаваторов траншейных роторных – ЭТР, цепных – ЭТЦ, землеройно-транспортных машин – ДЗ, машин для подготовительных работ и разработки мерзлых грунтов – ДП, машин для уплотнения грунтов и дорожных покрытий – ДУ, кранов стреловых самоходных – КС, строительных башенных кранов – КБ, оборудования для погружения свай – СП, бурильных и бурильно-крановых машин – БМ, машин для отделочных работ – СО, лебедок – ТЛ, погрузчиков многоковшовых – ТМ и одноковшовых – ТО, подъемников – ТП, конвейеров и питателей – ТК, машин для уборки и очистки городов – КО, ручных машин электрических – ИЭ, пневматических – ИП, вибраторов – ИВ и тому подобное. Цифровая часть индекса означает техническую характеристику машины. После цифровой части в индекс могут быть включены дополнительные буквы, обозначающие порядковую модернизацию машины, вид ее специального исполнения и т. п. В России все строительные машины выпускают в соответствии с Государственными стандартами (ГОСТами). В каждом ГОСТе указываются область применения, основные параметры и размеры, технические требования, методы испытаний, маркировка, упаковка, транспортирование и хранение машин. Предусмотренные в Государственных стандартах показатели и нормы отражают достигнутый передовой уровень техники в нашей стране и за рубежом. Основные части строительных машин (лабораторные работы №1, часть 2; 2; 3) Цель работ: ознакомление с основами устройства и характеристиками приводов машин, устройством колесного, гусеничного и рельсового хода машин, применяемых в железнодорожном строительстве, их маневренностью и проходимостью, системами управления. Каждая машина состоит из сборочных единиц (элементов), выполняющих определенные функции при ее работе: - силового оборудования (одного или нескольких двигателей) для получения механической энергии; - рабочего оборудования для непосредственного воздействия на перерабатываемый материал и выполнения заданного технологического процесса (машины могут иметь сменное рабочее оборудование, оснащаться двумя видами рабочего оборудования); - ходового оборудования (у переносных и стационарных машин оно отсутствует) для передвижения машины и передачи ее веса и рабочих нагрузок на опорную поверхность; - передаточных механизмов (трансмиссий), связывающих рабочее и ходовое (у самоходных машин) оборудование с силовым; - системы управления для запуска, останова и изменения режимов работы силового оборудования, включения, выключения, реверсирования, регулирования скоростей и торможения механизмов и рабочего органа машины; - несущей рамы для размещения и закрепления на ней всех узлов и механизмов машины. Конструкции машин исключительно разнообразны, однако состоят из принципиально однородных конечных элементов - деталей, которые уже не допускают дальнейшего разобщения. Соединения деталей называются узлами. В сложных машинах используются детали многих сотен наименований. Изучение деталей машин — область механической специальности. Общее знакомство с наиболее распространенными деталями предусмотрено в процессе изучения машин на лабораторных занятиях.
Приводы строительных машин Привод – это совокупность силового оборудования, трансмиссии и систем управления, обеспечивающих приведение в действие механизмов машины и рабочих органов. Строительные машины могут быть оснащены одно- и многомоторным приводом. При одномоторном приводе движение всем рабочим органам передается через трансмиссии от одного двигателя или от нескольких двигателей, работающих на один вал. В случае многомоторного привода на машине устанавливается несколько двигателей, каждый из которых приводит в действие отдельный механизм (индивидуальный привод) или группу механизмов (групповой привод). Возможно использование индивидуально-группового привода. К недостаткам одномоторного привода относится наличие большого количества трансмиссий, осуществляющих передачу движения от силовой установки к отдельным механизмам, а также невозможность получения независимого распределения мощности между приводимыми в движение механизмами. Его неоспоримые достоинства – меньшая по сравнению с многомоторным приводом масса, простота и дешевизна изготовления. Достоинствами моногомоторного привода являются: возможность регулирования работы отдельных механизмов независимо друг от друга, значительное сокращение количества трансмиссий. В таких приводах легче осуществляется автоматизация. Возможность обеспечения более высокого КПД, простоты и агрегатности конструкции, автоматизации, лучших условий эксплуатации и ремонта предопределяет преимущественное применение на строительных машинах индивидуального привода механизмов. Общими требованиям, предъявляемыми к приводу большинства строительных машин, являются: автономность силового оборудования от внешнего источника энергии, минимальные габариты и масса, большая надежность и готовность к работе, высокий КПД, простота реверсирования механизмов и регулирования скоростей и рабочих усилий, плавность включения механизмов, независимость рабочих движений при возможности их совмещения, простота автоматизации системы управления, реализация блочных и агрегатных конструкций элементов привода. Дополнительные требования определяются режимом работы машины, который в основном характеризуется отношением максимальных крутящих моментов (нагрузок) к средним Тmax/Тср, отношением максимальных частот вращения (угловых скоростей) к средним ω max/ω ср., продолжительностью времени включения привода (ПВ) в процентах от общего времени работы машины, количеством включений в час (КВ), характером скоростного режима, реверсивностью. В зависимости от степени изменения этих параметров, режимы нагружения многих машин и их отдельных механизмов условно подразделяют на легкий, средний, тяжелый и очень тяжелый. Значения отдельных характеристик приведены в таблице 1. Исходя из этих условий для многих машин, также требуется, чтобы у приводов была высокая перегрузочная способность, способность ограничивать максимальные нагрузки, мягкая механическая характеристика, определяемая существенным изменением крутящего момента привода при изменении его угловой скорости (кривые скорости 3, 5, 6, 8 на рис. 1). Таблица 1 Силовое оборудование В качестве силового оборудования на строительных машинах широко используются двигатели внутреннего сгорания (ДВС), как правило, дизельные, и реже – карбюраторные. Мощность дизелей, применяемых на землеройно-транспортных машинах, достигает 1000…1200 кВт. Дизели обладают относительно высоким КПД (30…37%), сравнительно невысокими удельной массой (3…4кг/кВт) и расходом горючего (0, 2…0, 25 кг/кВт · ч). Долговечность дизелей составляет примерно 4000 ч работы, а при правильной эксплуатации может достигать 6000…8000 ч. Их неоспоримое достоинство – автономность от внешних источников энергии. К недостаткам дизелей в приводе строительных машин следует отнести затруднения эксплуатации при низких температурах и большую чувствительность к перегрузкам, связанную с его жесткой механической характеристикой. Механическая характеристика дизеля, определяемая изменением крутящего момента на валу и соответствующим усилием на рабочем органе в функции частоты его вращения и соответствующей скорости рабочего органа, характеризуется кривой 1 на рис. 1. Кривая 1 показывает, что в основной рабочей зоне характеристики крутящий момент нарастает от 0 до величины Тн при очень незначительном изменении частоты вращения. При дальнейшем изменении частоты вращения вала до момента начала опрокидывания (заглохания) двигателя крутящий момент возрастает незначительно – на 8…13%. В машинах, не требующих автономности от внешнего источника энергии, в качестве силового оборудования используют электродвигатели переменного или постоянного тока. Электродвигатели переменного тока, питающиеся обычно от электросети напряжением 380…220 В с нормальной частотой 50 Гц, конструктивно просты, дешевы, надежны и удобны в эксплуатации, поэтому наиболее широко применяются в качестве силового оборудования на строительных машинах. Электродвигатели с короткозамкнутым ротором наиболее просты, надежны и удобны в управлении. Однако в процессе работы они имеют большой пусковой ток. Эти двигатели, механическая характеристика которых на рисунке 1 представлена кривой 2', не имеют также достаточных возможностей регулирования скоростей в зависимости от нагрузки. Поэтому, как правило, их применение ограничивается небольшими мощностями – до 8…10 кВт. Асинхронные электродвигатели переменного тока с фазным ротором, механическая характеристика которых представлена на рис. 1 кривой 2, позволяют с помощью включения дополнительных сопротивлений в цепь ротора получить, кроме того, характеристики с различными степенями жесткости и способностью регулирования скорости от нагрузки. Эти характеристики обеспечивают удовлетворительные условия пуска и торможения механизмов. Асинхронные электродвигатели обладают высокой перегрузочной способностью, определяемой отношением максимального момента к номинальному, т.е. ψ = Тmax / Тном. Для электродвигателей общего назначения ψ = 1, 8…2, 2, а для электродвигателей специального кранового исполнения ψ = 2, 5…3, 4. Недостаток асинхронных электродвигателей – их высокая чувствительность к колебаниям напряжения в питающей сети, что имеет место на стройплощадке. В грузоподъемных машинах, требующих точной установки и плавной посадки грузов, применяют также двухскоростные асинхронные короткозамкнутые двигатели с соотношением скоростей 2; 8/3; 3; 10/3. В приводе ручных машин для снижения массы электродвигателей осуществляют их питание напряжением повышенной частоты. Так, переход с помощью специальных преобразователей на питание электродвигателей с частотой 50 на 400 Гц уменьшает массу электродвигателей в 3, 5 раза. Применение высокочастотных двигателей, имеющих жесткую характеристику, удобно для ручных машин с высокими скоростями рабочих органов, в которых изменение нагрузки не должно существенно влиять на частоту вращения вала. В таком приводе часто применяют однофазные коллекторные двигатели, обладающие высокой удельной мощностью на единицу массы и мягкой механической характеристикой, обеспечивающей изменение скорости рабочего органа при росте на нем нагрузки. Такие двигатели малочувствительны к колебаниям напряжения в питающей сети, устойчиво работают в режиме частых пусков, могут включаться в сеть постоянного и переменного тока без преобразователей. К недостаткам данного вида двигателей следует отнести их большую стоимость из-за наличия коллекторов и щеток, а также необходимость высококвалифицированного обслуживания. Среди различных типов электродвигателей особо можно выделить однофазный электромагнитный вибродвигатель. Отличаясь простотой конструкции и высокой надежностью в работе, электродвигатель производит непосредственное преобразование электромагнитной энергии в механическую с возвратно-поступательным движением. Это определяет основную область их применения в молотках и перфораторах, а также в качестве универсальных вибровозбудителей в вибропитателях, дозаторах, виброгрохотах, вибрационных насосах. Электродвигатели постоянного тока обеспечивают лучшую плавность пуска и торможения механизмов по сравнению с двигателями переменного тока. Как видно из рис. 1 двигатели с последовательным возбуждением обладают мягкой (кривая 3), с параллельным возбуждением – жесткой (кривая 4) механическими характеристиками. Однако эти двигатели имеют большую удельную массу (кг/кВт) по сравнению с асинхронными двигателями и могут работать в условиях строительства в основном от специального генератора постоянного тока или тиристорных преобразователей. Поэтому их применение на строительных машинах ограничено. В этом случае двигатели чаще всего работают в системах: трехобмоточный генератор – двигатель (ТГ – Д), генератор – двигатель с электромашинным усилителем (Г – Д с ЭМУ) или магнитным усилителем (Г – Д с МУ). Механические характеристики этих силовых установок (кривые 5 и 6 на рис. 1) относятся к числу мягких, у которых скорость приводимых рабочих органов существенно меняется по мере изменения рабочей нагрузки. В переходных режимах пуска и торможения такие установки обеспечивают необходимую плавность. Поэтому, несмотря на большую удельную массу, которая в 1, 5…2, 5 раза больше любых других, их наиболее целесообразно применять для привода мощных строительных машин, работающих в условиях быстро меняющихся тяжелых нагрузок, главным образом для экскаваторов средней и большой мощности. Кроме двигателей внутреннего сгорания и электродвигателей к силовому оборудованию строительных машин относятся также комбинированные силовые установки: ДВС – электрогенератор, обеспечивающий электропривод механизмов от автономного источника энергии; ДВС (или электродвигатель) – гидронасос, обеспечивающий гидропривод механизмов; ДВС (или электродвигатель) – компрессор (компрессорная установка), обеспечивающая пневмопривод механизмов. Значительное количество самоходных строительных машин (экскаваторы, самоходные краны, скреперы, автогрейдеры, грейдер-элеваторы и т.д.) имеют дизель-электрический привод, состоящий из быстроходного транспортного дизеля, вращающего генератор, питающий электродвигатели машины. Дизель-электрический привод лучше приспособлен к перегрузкам, чем двигатель дизеля. Для нормальной его работы в условиях резкопеременной нагрузки необходимо, чтобы число оборотов дизеля, а, следовательно, и его мощность не изменялись, то есть, чтобы характеристика была жесткой. Снабженные дизель-электрическим приводом самоходные строительные машины могут иметь тяговые двигатели постоянного тока, встроенные вместе с редукторами в ведущие колеса, называемые в этом случае мотор-колесами. Дизель-электрогидравлическим приводом оборудуют тяжелые самоходные скреперы.
Каждый храповый останов состоит из храпового зубчатого колеса 1 с зубьями специальной формы, жестко закрепленного на валу или барабане, и собачки 2, свободно сидящей на неподвижной оси. Собачка вводится в зацепление с зубьями храпового колеса принудительно (с помощью пружины 3), препятствуя его повороту при опускании груза. При подъеме груза собачка свободно проскакивает по зубьям колеса, не препятствуя его вращению. Для смягчения ударов при включении останова применяют 2..3 собачки. Клиновые фрикционные остановы в строительных машинах применяются очень редко. Тормоза уравновешивают целиком или частично крутящий момент на барабане или валу механизма тормозным моментом, возникающим от сил трения между контактирующими подвижными и неподвижными элементами тормоза. Подвижный элемент тормоза (шкив, диск) жестко соединен с затормаживаемым валом, а неподвижный (лента, колодка, диск) – с корпусом машины. Тормоза подразделяют: - по назначению – стопорные для остановки механизмов, отключенных от двигателя, или удержания груза на весу и спускные – для регулирования скорости опускания груза; - по характеру действия приводного усилия – нормально замкнутые (постоянно замкнуты в рабочем состоянии усилием пружины или весом груза, размыкаются одновременно с включением механизма в работу), нормально разомкнутые (постоянно разомкнуты и замыкаются при необходимости торможения) и комбинированные (в обычных условиях работают как нормально разомкнутые, а в аварийных – как нормально замкнутые); - по принципу действия – автоматические (с электромагнитным, электрогидравлическим и электромеханическим приводом), замыкаемые одновременно с отключением двигателя механизма, в том числе при перегрузке, и управляемые (замыкаемые или размыкаемые оператором); - по конструктивному исполнению контактирующих рабочих элементов тормоза подразделяются на колодочные, ленточные, дисковые и конусные. Местом установки тормоза в кинематической цепи механизма (двигатель – редуктор – исполнительный орган машины) обычно является быстроходный вал с наименьшим крутящим моментом. Шкив тормоза, выполняемый, как правило, заодно с полумуфтой соединительной муфты, устанавливают на валу редуктора, а другую полумуфту – на валу двигателя. В особо ответственных механизмах, связанных с подъемом людей, монтируют два тормоза на быстроходном и тихоходном валах. Ленточный тормоз состоит из упругой стальной ленты с фрикционными накладками, охватывающей тормозной шкив и связанной с системой управления. На рисунке 11, г показан нормально замкнутый автоматический ленточный тормоз, лента 5 которого замыкается относительно шкива 4 пружиной 10 и размыкается электромагнитом. При пуске электродвигателя механизма питаемая током катушка 8 электромагнита втягивает якорь 7, который через толкатель 6 воздействует на рычаг 9, связанный со сбегающей ветвью ленты. При повороте рычага в сторону шкива прекращается контакт между накладками ленты и рабочей поверхностью шкива, то есть происходит размыкание тормоза. Ходовое оборудование Ходовое оборудование предназначено для: передачи на опорную поверхность (грунт, дорожное покрытие, рельсы) веса машины и внешних нагрузок, действующих на неё при работе; передвижения машины на рабочих (при выполнении рабочего процесса) и транспортных скоростях; стопорения машины при работе. Ходовое оборудование включает гусеничное, пневмоколёсное, рельсовое, шагающее, комбинированное ходовое устройство и механизмы для его привода. Каждое ходовое устройство состоит из движителя и подвески. Движитель находится в постоянном контакте (сцеплении) с опорной поверхностью и обеспечивает поступательное движение машины. Подвеска соединяет движитель с опорной рамой машины и выполняется жёсткой у тихоходных машин, полужёсткой и упругой – у быстроходных. Самоходные строительные машины монтируют на базе серийных грузовых автомобилей, колёсных и гусеничных тракторов, пневмоколёсных тягачей. Они могут иметь также специальные гусеничные и пневмоколёсные шасси с приводом от общей трансмиссии машины или от индивидуальных электрических и гидравлических двигателей. Специальные шасси современных строительных машин унифицированы. Пневмоколёсное ходовое оборудование обеспечивает машинам маневренность, мобильность, высокие скорости (до 60…70 км/ч) и плавность передвижения, более благоприятное, чем у гусеничных машин, взаимодействие с дорогой. Пневмоколёсный движитель состоит из ведомых и ведущих (приводных) колёс, вращательное движение которых преобразуется в поступательное движение машины. У большинства строительных машин все колеса – ведущие. Количество колес зависит от допускаемой на каждое колесо нагрузки, условий и режимов работы машины, требуемых скоростей её движения. Ходовые устройства строительных машин имеют обычно от 4 до 8 одинаковых взаимозаменяемых колес. Основным элементом каждого пневмоколеса является накачанная воздухом через специальный вентиль упругая резиновая шина, смонтированная на ободе. Шины могут быть камерными и бескамерными. Наиболее широко распространены камерные шины (рис. 22, а), которые состоят из покрышки 2, камеры 3, представляющей собой замкнутую резиновую трубу, и ободной ленты 4. В таких шинах воздух накачивается в камеру. Существуют также бескамерные шины (рис. 22, б), в которых воздух закачивается между герметично соединенными покрышкой 2 и ободом 5. Верхняя утолщенная часть каркаса покрышки образует корону шины, на которой формируется взаимодействующий с дорогой протектор 1 шин. Он может иметь мелкий рисунок для дорог с твердым покрытием и крупный – для грунтовых дорог (рис. 22, в). Для повышения проходимости машин, работающих и передвигающихся по грунтам с пониженной несущей способностью, применяют шины с большой опорной поверхностью – широкопрофильные и арочные (рис. 22, г). Такие шины имеют высокие грунтозацепы, их удельное давление на грунт не превышает 0, 05…0, 14 МПа. Многие машины оборудуют устройствами для регулирования давления в шинах из кабины машиниста (каждой в отдельности или всех вместе) в зависимости от условий работы и передвижения машины. С уменьшением давления в шинах до 0, 05…0, 08 МПа увеличивается площадь их контакта с грунтом и, соответственно, уменьшается удельное давление на грунт, повышается проходимость машины. Наряду с этим растут сопротивление движению машины и интенсивность износа шин. При движении в хороших дорожных условиях давление в шинах повышают до 0, 5…0, 7 МПа.
Рис. 22. Типы пневмошин
На пневмоколеса опираются приводные (ведущие) и неприводные мосты, соединяемые с рамой машины жёсткой, балансирной или упругой подвеской. Общее количество мостов обычно не превышает трёх. Наиболее нагруженные мосты имеют сдвоенные пневмоколёса. Направление движения машины меняется путём поворота управляемых колёс, поворотом мостов с колёсами в плане, обеспечением различной скорости движения правых и левых колёс и т. п. Привод ведущих колёс может быть общим от механической трансмиссии машины, от самостоятельного ходового электродвигателя или низкомоментного гидромотора через систему передач и валов, а также индивидуальным – от приводных ступичных блоков, встроенных в ступицу каждого колеса (мотор-колеса) и включающих электродвигатель или гидромотор, планетарный редуктор и тормоз. Скорость машины с мотор-колёсами можно плавно регулировать в широком диапазоне в зависимости от дорожных условий и действующих на неё нагрузок. Каждое мотор-колесо может быть поворотным, за счёт чего улучшается маневренность машины. Для разгрузки ходовых устройств строительных экскаваторов, стреловых самоходных кранов, бурильных и других машин, при работе применяют выносные опоры-аутригеры. Масса пневмоколёсных ходовых устройств составляет 10…12% общей массы машины. Гусеничное ходовое оборудование характеризуется хорошим сцеплением с грунтом, высокой тяговой способностью, большой опорной поверхностью, низким удельным давлением на грунт (0, 04…0, 1 МПа), определяющими в комплексе его высокую проходимость, и применяется на машинах, передвигающихся в условиях плохих дорог и бездорожья. Недостатки гусеничного оборудования – тихоходность (не более 10 км/ч при жесткой подвеске), сравнительно большая масса (30…40% от массы машины), сложность конструкции. Гусеничные машины обычно обслуживают объекты с большими объёмами работ. Для транспортирования их с одного объекта на другой применяют пневмоколёсные прицепы-тяжеловозы (трайлеры). В городском строительстве используют машины с двухгусеничным ходовым оборудованием. Гусеничный движитель (рис. 23, а) состоит из гусеничной ленты (цепи) 2 в виде шарнирно соединённых между собой звеньев (пластин, траков), огибающих приводное 1 и направляющее (натяжное) 9 колёса. Последние установлены на концах рамы 7. Нагрузки от машины передаются на нижнюю ветвь гусеничной ленты через движущиеся по ней опорные катки 6. Холостую верхнюю ветвь гусеницы поддерживают и предохраняют от провисания ролики 3. Натяжение гусеничной ленты регулируют винтовым натяжным устройством 8, перемещающим натяжное колесо 9. Для машин, работающих и передвигающихся на слабых, переувлажнённых и заболоченных грунтах, применяют уширенно-удлинённые движители с увеличенной опорной поверхностью гусениц и удельным давлением на грунт 0, 02…0, 03 МПа. По приспособляемости к неровностям опорной поверхности различают жесткие, мягкие и полужёсткие движители. У жёстких движителей опорные катки соединяются непосредственно с рамой (рис. 23, а). Скорость движения машин с жёсткой подвеской – 5…10 км/ч. Рамы жёстких движителей строительных экскаваторов, стреловых самоходных кранов, погрузчиков и других машин жёстко соединены между собой поперечными балками, на которые опирается ходовая рама 5, несущая опорно-поворотный круг 4 и воспринимающая вес и внешние нагрузки машины. У мягких движителей опорные катки укрепляют на балансирах с упругой промежуточной связью, а гусеницы делают со сравнительно мелкими пластинами или сквозными фигурными траками. Машины, снабженные мягким гусеничным ходом, рассчитаны на значительные самостоятельные перемещения. Переднюю часть машины иногда подрессоривают, передавая ее вес на рамы гусениц через листовую поперечную рессору. Такую подвеску называют полужесткой и применяют в гусеничных машинах мощностью до 75 кВт, которые имеют, в основном, транспортно-тяговое назначение. Скорость движения при этом может достигать 35…40 км/ч. Полностью упругую подвеску делают в гусеничных машинах чисто транспортного назначения, например в вездеходах. Она отличается высокой стоимостью и требует внимательного ухода. Привод ведущего колеса каждой гусеницы может быть общим (рис. 23, б, в), от электродвигателя или двигателя внутреннего сгорания через систему передач, а также раздельным (индивидуальным) – от электродвигателя (рис. 23, г) или низкомоментного гидромотора через редуктор. Автоматические и управляемые тормоза привода гусениц обеспечивают торможение, остановку и маневрирование машины. Движение по кривой достигается притормаживанием одной из гусениц, а разворот – движением гусениц в противоположные стороны или полным торможением одной из гусениц.
Рис. 23. Гусеничное ходовое оборудование
Рис. 24. Рельсовое ходовое оборудование
Рельсовое ходовое оборудование (рис. 24) имеют башенные, козловые, мостовые и специальные стреловые самоходные краны, электротали – тельферы, сваебойные установки, мотовозы, дрезины. Оно характеризуется простотой конструкции, небольшими сопротивлениями передвижению, а также малыми маневренностью и скоростью передвижения. Основными элементами рельсового ходового устройства являются размещаемые на рельсах стальные колёса с гладким ободом, снабженным одной или двумя ребордами. Привод ведущих колёс может быть общим от электродвигателя или двигателя внутреннего сгорания через систему валов и передач и индивидуального электродвигателя через редуктор. Приводы оборудуют управляемыми и автоматическими тормозами. Одно или несколько колёс с общей рамой, двигателем, редуктором и тормозом образуют приводную ходовую тележку. Количество колёс в тележке определяется действующей нагрузкой. Приводные и неприводные (без привода) ходовые тележки кранов шарнирно соединяются с опорной рамой и оборудуются противоугонными клещевыми захватами. Для движения по рельсам во время строительных работ могут быть приспособлены обычные автомобили и тракторы. Для этого колесные машины снабжаются навесным устройством с рельсовыми ребордчатыми роликами. В опущенном положении передние и задние ролики удерживают машину в колее. Перемещается же она на собственных колесах с застопоренным рулевым управлением. Тяжелые автомобили при движении по рельсам на таком комбинированном ходу способны везти до десяти груженых вагонов. Гусеничные тракторы для перемещения по рельсам имеют траки, на которые наваривают вертикальные пластины, выполняющие роль реборд. Тракторы проходят не только в пределах обычной колеи, но и по стрелочным переводам. При таком оборудовании они способны перемещаться также по обычному мягкому грунту.
Управление машинами
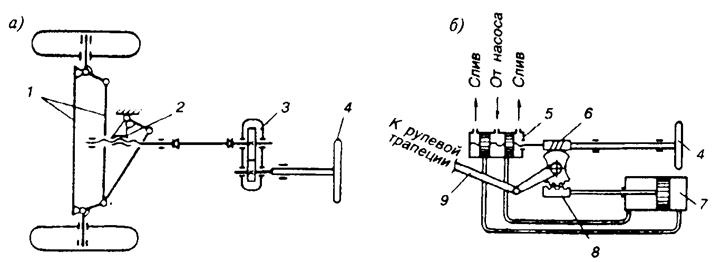
Устройства управления позволяют человеку направлять и регулировать работу машины. Самодействующие устройства, работающие по заданной программе, называются автоматами. Если управление частично производится автоматами, а частично человеком, его называется автоматизированным. Если самодействующее устройство работает циклически, и для каждого нового цикла необходимо вмешательство человека – оно называется полуавтоматическим. Полуавтоматически обычно действуют различные контрольные и предохранительные устройства. В строительных машинах управление подразделяется по нескольким назначениям: - управление двигателем; - управление установкой рабочего оборудования; - управление сцепными муфтами и тормозами; - управление движением всей машины. Управление двигателем сводится к пуску, остановке и регулированию скорости. Для машин, работающих с постоянным числом оборотов (лебедки, грохоты, дробилки, бетоносмесительные агрегаты), управление двигателем сводится к пуску и остановке. Если предусматривается перемена хода (реверсирование), то это достигается электрическим способом (сменой фаз). В транспортных машинах число оборотов двигателя внутреннего сгорания регулируется водителем в широких пределах. Это достигается изменением подачи горючей смеси в цилиндры. Запуск обычно осуществляется от аккумуляторной батареи с помощью стартера, а в дизельных машинах – от двигателя-пускача. Все это не требует чрезмерных усилий от человека. Для перемещения тяжелого рабочего оборудования в процессе управления используется энергия двигателя. Управление муфтами и тормозами может производиться с помощью ручных рычагов и педалей, но в ряде машин физическое воздействие человека усиливается гидравлическими устройствами насосной или безнасосной систем. В управлении движением всей машины необходимо выделить переключение передач и рулевое управление, обеспечивающие направленное движение машины. Рулевое управление воздействует на направляющие колеса или механизм поворота частей корпуса машины. В небольших и сравнительно легких машинах применяют механическое рулевое управление, использующее мускульную силу водителя; в больших и тяжелых машинах – механизмы с гидроусилением и насосные гидросистемы. Системы управления строительных машин по конструктивным признакам разделяются на механические, гидравлические, пневматические, электрические и смешанные (комбинированные). Механическая система обеспечивает связь руки и ноги машиниста с муфтами и тормозами через рычаги и тяги. Такая конструкция надёжна в эксплуатации и имеет высокую чувствительность управления. Основные её недостатки – необходимость приложения значительных мускульных усилий машиниста к рычагам и педалям, быстрая утомляемость машиниста, ведущая к снижению производительности машины, необходимость частых смазок и регулировок быстроизнашивающихся шарнирных соединений тяг и рычагов. Обычно механическая система используется в качестве вспомогательной для управления механизмами, не принимающими участия в выполнении рабочего процесса. Поворот колёс машины в этом случае осуществляется с помощью рулевого управления посредством приложения усилия машиниста к рулевому колесу 4. При этом через механическую передачу 3 (цилиндрическую или червячную пару) и сектор 2, взаимодействующий с винтовым устройством, перемещаются поперечные тяги 1, соединённые с управляемыми колёсами (рис. 25, а). Для облегчения труда машиниста в передаточный механизм рулевого управления включают усилители в виде гидравлического или пневматического цилиндра с поршнем. Действие усилителя основано на том, что при повороте рулевого колеса 4 и наличии нагрузки на тяге рулевой трапеции 9 червяк 6 перемещается в осевом направлении, и золотник распределителя 5 открывает доступ жидкости или воздуху в цилиндр усилителя 7, шток которого, взаимодействуя с рейкой 8, передаёт усилие на тягу 9, соединённую с рулевой трапецией (рис. 25, б).
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1377; Нарушение авторского права страницы