|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Различают простые, дифференциальные и суммирующие ленточные тормоза, которые отличаются друг от друга способом закрепления набегающего конца тормозной ленты. ⇐ ПредыдущаяСтр 6 из 6
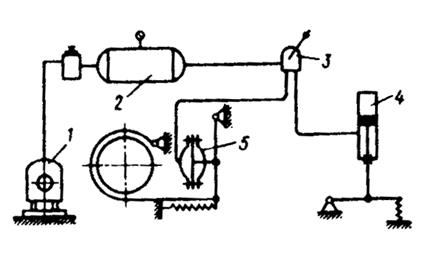
Колодочные тормоза (рис. 11, в, д) выполняют обычно с двумя тормозными колодками 11, зажимающими тормозной шкив с диаметрально противоположных сторон. К колодкам прикреплена стальная вальцованная лента, обладающая повышенными фрикционными качествами. Существуют двухколодочные тормоза – стопорные, автоматические, нормально замкнутые, двустороннего действия. Замыкание двухколодочных тормозов осуществляется усилием сжатой пружины 10, размыкание – специальными тормозными электромагнитами, электромеханическими или электрогидравлическими толкателями 12, включенными параллельно приводному двигателю механизма. Размыкание тормоза происходит одновременно с включением двигателя. На рисунке 11 указаны следующие параметры: Мт – тормозной момент; Dт – диаметр тормозного шкива; Nт – усилие прижатия тормозных колодок к шкиву; Fсб, Fнб – натяжение в сбегающей и набегающей ветвях ленты. Дисковые и конусные тормоза по конструкции и принципу действия аналогичны дисковым и конусным муфтам сцепления. К элементам механических трансмиссий относят также реечные, винтовые, кривошипно-ползунные, эксцентриковые и кулачковые механизмы, а также подшипники, являющиеся опорами валов и вращающихся осей. По виду трения подшипники делят на подшипники качения и скольжения. Подшипники качения – это опоры вращающихся или качающихся деталей, использующие элементы качения (шарики или ролики) и работающие на основе трения качения. Подшипники скольжения – это опоры вращающихся деталей, работающих в условиях относительного скольжения поверхности цапфы по поверхности подшипника, разделенных слоем смазки. Гидравлический привод ( гидравлические трансмиссии ) применяется в большинстве современных строительных машин (экскаваторов, кранов, подъемников, бульдозеров, скреперов и других) для передачи мощности от основного двигателя к рабочему органу и исполнительным механизмам, а также в системах управления машин. Он выполняется в виде силовой гидростатической (объемной) или гидродинамической передачи (гидромуфты, гидротрансформатора), которые устанавливают между основным двигателем и трансмиссией. Принцип действия таких передач основан на гидродинамической (то есть через жидкость) связи между их ведущими и ведомыми элементами. Гидростатический привод (рис. 12) отличается бесступенчатостью регулирования и плавностью работы, позволяет реализовать большие передаточные числа с одновременным преобразованием вращательного движения в поступательное и легко отключать ведущий орган машины от ведомого, заменить более тяжелую механическую трансмиссию и облегчить управление. Его недостатками являются более низкий, чем у механического привода КПД (η = 0, 75…0, 85 до 0, 9), сравнительно небольшие величины хода рабочих органов, сложность ремонта, утечка масла. Рабочая жидкость (минеральное масло) всасывается из бака 1 шестрённым насосом 2, состоящим из пары находящихся в зацеплении зубчатых колес 3, ведущее из которых приводится во вращение от вала отбора мощности двигателя. Зубья колес перемещают жидкость так, что в зоне А создается вакуум, а в зоне Б – повышенное давление (обычно до 7, 5 МПа), под действием которого жидкость через распределитель 5 с золотником 8 направляется в одну из полостей силового цилиндра 6. Одновременно из другой его полости масло сливается в бак через распределитель и фильтр 9. Предохранительный клапан 4, установленный на нагнетательной линии, перепускает жидкость в бак, если давление ее превысит допустимое. Изменение направления движения поршня 7 производят перемещением золотника 8 вручную или атоматически – посредством электромагнитов. Если необходимо регулировать скорость и вращающий момент на выходе гидропередачи, распределители снабжаются дросселями, изменяющими количество подаваемой в цилиндр жидкости.
Рис. 12. Схема объемного (гидростатического) привода
Ценными свойствами гидродинамичеких передач являются: отсутствие жесткой связи между ведущим и ведомым валами; плавное автоматическое изменение крутящего момента на ведомом валу и числа его оборотов, а, следовательно, и скорости движения машины; сглаживание толчков, создаваемых ведущими ходовыми колесами машины, что повышает долговечность двигателя; проскальзывание ведущей части относительно ведомой при перегрузках строго определенной величины, предотвращающее поломки трансмиссии и повышающее долговечность машины. Наличие гидропередачи исключает чрезмерное возрастание силы тока в сети (обычно при подключении двигателя к нагруженной трансмиссии), что может привести к выключению автомата или повреждению электродвигателя. Гидромуфта (рис. 13) состоит из расположенных с зазором насосного 1 и турбинного 2 колес, находящихся в корпусе 3, заполненном минеральным маслом. Насосное колесо насажено на ведущем валу 5, а турбинное – на ведомом 4. При вращении вала 5 приводится в движение насосное колесо. При этом находящееся в кожухе муфты масло движется от центра к периферии данного колеса с непрерывным возрастанием линейной скорости и увеличением давления. В процессе движения турбинное колесо всегда имеет меньшее число оборотов nт, чем насосное nн, причем, в момент пуска nт = 0. Избыток давления на выходе с лопаток насосного колеса по сравнению с величиной давления при входе на лопатки турбинного колеса обеспечивают переход масла через зазор и подачу его в турбинное колесо, которое при этом вращается в ту же сторону что и насосное. Разность nн – nт = S по аналогии с асинхронными электродвигателями называют скольжением и выражают в процентах от величины nн. Из турбинного колеса масло опять попадает в насосное и, продолжая перемещаться по замкнутому контуру, образует поток циркуляции масла в пространстве. На характеристике гидромуфты (рис. 14) по осям координат отложены моменты (Мт и Мн) и числа оборотов (nт и nн) насосного и турбинного колес в процентах от их максимальных рабочих, номинальных значений. Из графиков следует, что при идеальном холостом ходе муфты, когда скольжение равно нулю и, следовательно, nт=nн, она не передает никакого момента. Наоборот, при S=100%, то есть при неподвижном турбинном колесе nт = 0, происходит передача максимального момента, в 6, 5 раза превышающего его номинальное значение. Это бывает необходимо, например, при трогании машины с места. Наличие в гидромуфте двух колес, действие которых друг на друга согласно третьему закону Ньютона должно быть равно по величине и противоположно по знаку, не допускает изменения вращающего момента, передаваемого муфтой, поэтому коэффициент трансформации муфты равен
к = Мт/Мн = 1.
КПД гидромуфты достигает 97…98%.
Рис. 13. Схема гидромуфты
Рис.14. Характеристика гидромуфты
Гидротрансформатор (рис. 15) состоит из трех основных элементов – насосного 1 и турбинного 2 колес и неподвижного направляющего аппарата 3 – реактора, соединенного с кожухом 14. Рабочие колеса гидротрансформатора имеют изогнутые лопатки специальной формы. От коленчатого вала 8 двигателя вращение через маховик 7 передается насосному колесу 1, лопатки которого закручивают жидкость, создавая запас кинетической энергии вращательного движения, используемый для преодоления внешних сил сопротивления, действующих через трансмиссию на ведомый вал 15. Из насосного колеса 1 жидкость последовательно проходит турбинное колесо 2, передающее движение трансмиссии, и неподвижный направляющий аппарат 3, образуя, как и в случае гидромуфты, поток циркуляции масла. Коленчатый вал 8 приводит в движение также шестерённый насос 9, всасывающий из бака 5 через фильтр 6 масло и нагнетающий его в радиатор 10, откуда оно затем попадает в золотниковое устройство 12. Когда золотник 13 находится в нижнем положении, масло подается в рабочую полость гидротрансформатора. Для отключения двигателя от трансмиссии золотник 13 штоком пневмокамеры 11 перемещается в верхнее положение. При этом масло попадает не в рабочую полость гидротрансформатора, а в струйный насос-эжектор 4, направляющий масло через сливную трубу в масляный бак. Эжектор 4 подсасывает масло из рабочей полости гидротрансформатора, нарушая гидравлическую связь между насосным 1 и турбинным 2 колесами, и отключает двигатель от ведомого вала. Лопасти неподвижного колеса 3 расположены так, что выходящий из него поток жидкости безударно втекает в насосное колесо. Поэтому нагрузка последнего остается неизменной, не зависящей от скорости вращения турбинного колеса. Это значит, что двигатель машины, снабженный гидротрансформатором, работает с постоянным числом оборотов n н = const и вращающим моментом Mн = const, независимо от изменения действующих на машину внешних сопротивлений («непрозрачная» характеристика).
Рис. 15. Схема гидротрансформатора
Рис. 16. Характеристика гидротрансформатора
Величина передаваемого гидротрансформатором момента может автоматически изменяться в зависимости от соотношения между скоростями вращения насосного и турбинного колес. КПД гидротрансформатора достигает 90%. Как следует из характеристики (рис. 16) к = Мт/Мн может быть как больше, так и меньше 1, причем максимум КПД (η ) находится около к = 1. Применение гидротрансформатора позволяет ограничить динамические перегрузки, сокращая этим износ машины, повышает долговечность узлов трансмиссии, уменьшает время простоев и стоимость ремонтов. Пневматический привод использует энергию сжатого в компрессорах до 0, 5…0, 8 МПа воздуха и применяется для питания пневматических инструментов, подъемников и различной аппаратуры при отделочных работах, для пневмотранспорта цемента, гипса, песка, извести, шлака, опилок, бетонных смесей и растворов, а также в системах ручного и автоматического управления, реже для привода строительных машин. Основными частями такого привода являются: компрессор с приводным двигателем и воздухосборником (ресивером), пневматические двигатели вращательного и возвратно-поступательного действия, соединительные воздухопроводы, регуляторы давления и предохранительные клапаны, воздушные фильтры и масловодоотделители. Отработанный воздух из пневмодвигателей выбрасывается непосредственно в атмосферу. Компрессоры приводятся в действие от электродвигателей и двигателей внутреннего сгорания. Компрессор с приводом и вспомогательной аппаратурой называют компрессорной установкой, которая может быть переносной и передвижной. Передвижные установки, смонтированные на одноосных и двуосных тележках, прицепах, шасси грузовых автомобилей (самоходные установки) широко используют на строительно-монтажных работах. Переносные установки применяют в основном при выполнении отделочных работ небольших объемов. Компрессоры по принципу действия разделяют на поршневые, ротационные, турбинные, диафрагмовые и винтовые. Наиболее широко используются поршневые компрессоры одно- и двухступенчатого сжатия. В компрессорах одноступенчатого сжатия воздух сжимается до 0, 2…0, 25 МПа, двухступенчатого – до 0, 8 МПа. На рисунке 17 приведена схема поршневого двухступенчатого компрессора. При вращении коленчатого вала 1 двигателя 14 и перемещении поршня 10 в цилиндры первой ступени сжатия 11 через воздушный фильтр 8 и всасывающие клапаны 9 поступает воздух, который сжимается и, преодолевая сопротивление пружин нагнетательных клапанов 7, проходит по трубе 6 в холодильник 3, а затем поступает в цилиндры второй ступени сжатия 18. Там воздух вторично сжимается и по трубе 19 поступает в ресивер 4. Для предотвращения утечки воздуха из ресивера служит обратный клапан 20. Компрессор снабжен парой предохранительных клапанов высокого 21 и низкого 5 давления, вентилятором 2, двумя манометрами М и автоматическим регулятором, состоящим из сервомеханизма 17, датчика 16 и регулятора скорости 12, соединенного с дроссельной заслонкой 13 карбюратора двигателя 14. Автоматический регулятор предназначен для ограничения давления в воздухосборнике и уменьшения числа оборотов двигателя во время холостой работы компрессора при отсутствии потребления сжатого воздуха. При повышении давления в воздухосборнике сверх допустимой величины плоский клапан датчика 16, преодолевая сопротивление его пружины, открывает канал 15, для пропуска сжатого воздуха к сервомеханизму 17 и регулятору скорости 12. Поршень последнего через систему рычагов воздействует на дроссельную заслонку 13, снижая число оборотов двигателя. Одновременно поршень сервомеханизма 17 отходит влево, сжимая пружину и открывая выход воздуха в атмосферу. При понижении давления в воздухосборнике до требуемой величины клапан датчика 16 опускается, и сжатый воздух из сервомеханизма и регулятора скорости выходит через клапан датчика в атмосферу. Одновременно поршни сервомеханизма и регулятора скорости под действием пружин приходят в исходное положение, возобновляя нормальную работу компрессора. Промежуточное охлаждение необходимо, так как при температуре 150-160°С может произойти разложение масла, применяемого для смазки цилиндров, а при температуре 220-250°С – его воспламенение.
Рис. 17. Схема устройства поршневого компрессора двухступенчатого сжатия
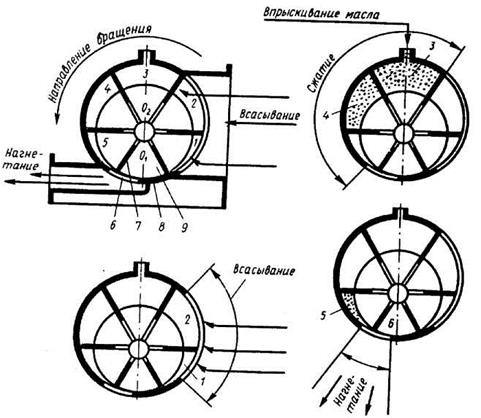
Рис. 18. Схема ротационного компрессора
Ротационные компрессоры выгодно отличаются от поршневых небольшими габаритами и весом, не требуют устройства кривошипного механизма и нагнетательных клапанов, допускают прямое соединение с электродвигателем и позволяют получить равномерную подачу воздуха. К недостаткам этих компрессоров относятся: большое потребление электроэнергии, значительный расход смазочного масла, повышенный износ корпуса, а также обычно несколько меньшее значение КПД. Ротационные компрессоры (рис. 18) представляют собой цилиндр 8, в котором вращается эксцентрично расположенный ротор 9. В пазах ротора расположены лопатки 7, которые при вращении последовательно проходят расширяющуюся и сужающуюся части серповидного пространства между ротором и корпусом и, под действием центробежных сил, плотно прижимаются к внутренней поверхности цилиндра. Между лопатками и цилиндром образуются полости-ячейки 1…6, в которых происходят процессы всасывания воздуха 1…2, его сжатия 3…4 и нагнетания в воздухосборник 5…6. В период сжатия воздуха во внутреннюю полость компрессора автоматически впрыскивается масло, которое охлаждает сжатый воздух, смазывает трущиеся детали и улучшает компрессию, образуя масловоздушную смесь. Промышленностью выпускаются передвижные ротационные компрессоры производительностью до 10 м3/мин с давлением до 0, 8 МПа. На рисунках 19…21 представлены схемы установок и их отдельных элементов для механизированного нанесения штукатурного раствора и окрасочных составов.
Рис. 19. Схема механизированного нанесения штукатурного раствора: 1 – растворосмеситель; 2 – рама; 3 – растворопровод; 4 – форсунка; 5 – приемный лоток готовой растворной смеси; 6 – бункер; 7 – вибросито; 8 – компрессор; 9 – растворонасос; 10 – фланцевое соединение звеньев растворопровода; 11 – штуцер; 12 – инвентарный растворопровод; 13 – воздушный шланг; 14 – резиновый шланг; 15 – побудитель раствора бункера; 16 – воздушный вентиль а) а¢ ) пневмокраскораспыление Р=0, 4…0, 6 МПа
а¢ ¢ ) нагнетание Р=6…23 (42) МПа
б)
Рис. 20. Нанесение окрасочных составов: а) схема компрессорного окрасочного агрегата для механизированного нанесения малярных составов: 1 – компрессор; 2 – нагнетательный бак; 3 – воздушный шланг; 4 – материальный шланг; 5 – пистолет-пневмокраскораспылитель; 6 – масловодоулавливатель; 7 – материальный шланг высокого давления; 8 – пистолет-краскораспылитель; б) схема пистолета-распылителя: 1 – ручка; 2 – воздушный клапан; 3 – регулировочный винт; 4 – запорная игла игольчатого клапана; 5 – головка с отверстием; 6 – курковый включатель иглы и клапана
а) б)
Рис. 21. Схема устройства пневматических форсунок для нанесения штукатурного раствора: а) с центральной подачей сжатого воздуха; б) с кольцевой подачей сжатого воздуха 1 – подача воздуха или воды; 2 – подача раствора; 3 – вентиль Исполнительные приборы подключаются к ресиверу компрессора с помощью резиновых шлангов. Часовая производительность компрессора
Фк = β ·n·m·Wк,
где β = 1, 3…1, 4 – коэффициент запаса; n – число потребителей; m – число включений в час; Wк – расход воздуха на 1 операцию, м3. Объем ресивера V =
где α – коэффициент запаса на объем ресивера; W0 – секундный расход воздуха, м3; t = 20…30 с – время подкачки; ρ max – максимальное давление в ресивере. Диаметр трубопровода d = 2
где υ – скорость потока воздуха в трубопроводе, равная 10…20м/с.
Ходовое оборудование Ходовое оборудование предназначено для: передачи на опорную поверхность (грунт, дорожное покрытие, рельсы) веса машины и внешних нагрузок, действующих на неё при работе; передвижения машины на рабочих (при выполнении рабочего процесса) и транспортных скоростях; стопорения машины при работе. Ходовое оборудование включает гусеничное, пневмоколёсное, рельсовое, шагающее, комбинированное ходовое устройство и механизмы для его привода. Каждое ходовое устройство состоит из движителя и подвески. Движитель находится в постоянном контакте (сцеплении) с опорной поверхностью и обеспечивает поступательное движение машины. Подвеска соединяет движитель с опорной рамой машины и выполняется жёсткой у тихоходных машин, полужёсткой и упругой – у быстроходных. Самоходные строительные машины монтируют на базе серийных грузовых автомобилей, колёсных и гусеничных тракторов, пневмоколёсных тягачей. Они могут иметь также специальные гусеничные и пневмоколёсные шасси с приводом от общей трансмиссии машины или от индивидуальных электрических и гидравлических двигателей. Специальные шасси современных строительных машин унифицированы. Пневмоколёсное ходовое оборудование обеспечивает машинам маневренность, мобильность, высокие скорости (до 60…70 км/ч) и плавность передвижения, более благоприятное, чем у гусеничных машин, взаимодействие с дорогой. Пневмоколёсный движитель состоит из ведомых и ведущих (приводных) колёс, вращательное движение которых преобразуется в поступательное движение машины. У большинства строительных машин все колеса – ведущие. Количество колес зависит от допускаемой на каждое колесо нагрузки, условий и режимов работы машины, требуемых скоростей её движения. Ходовые устройства строительных машин имеют обычно от 4 до 8 одинаковых взаимозаменяемых колес. Основным элементом каждого пневмоколеса является накачанная воздухом через специальный вентиль упругая резиновая шина, смонтированная на ободе. Шины могут быть камерными и бескамерными. Наиболее широко распространены камерные шины (рис. 22, а), которые состоят из покрышки 2, камеры 3, представляющей собой замкнутую резиновую трубу, и ободной ленты 4. В таких шинах воздух накачивается в камеру. Существуют также бескамерные шины (рис. 22, б), в которых воздух закачивается между герметично соединенными покрышкой 2 и ободом 5. Верхняя утолщенная часть каркаса покрышки образует корону шины, на которой формируется взаимодействующий с дорогой протектор 1 шин. Он может иметь мелкий рисунок для дорог с твердым покрытием и крупный – для грунтовых дорог (рис. 22, в). Для повышения проходимости машин, работающих и передвигающихся по грунтам с пониженной несущей способностью, применяют шины с большой опорной поверхностью – широкопрофильные и арочные (рис. 22, г). Такие шины имеют высокие грунтозацепы, их удельное давление на грунт не превышает 0, 05…0, 14 МПа. Многие машины оборудуют устройствами для регулирования давления в шинах из кабины машиниста (каждой в отдельности или всех вместе) в зависимости от условий работы и передвижения машины. С уменьшением давления в шинах до 0, 05…0, 08 МПа увеличивается площадь их контакта с грунтом и, соответственно, уменьшается удельное давление на грунт, повышается проходимость машины. Наряду с этим растут сопротивление движению машины и интенсивность износа шин. При движении в хороших дорожных условиях давление в шинах повышают до 0, 5…0, 7 МПа.
Рис. 22. Типы пневмошин
На пневмоколеса опираются приводные (ведущие) и неприводные мосты, соединяемые с рамой машины жёсткой, балансирной или упругой подвеской. Общее количество мостов обычно не превышает трёх. Наиболее нагруженные мосты имеют сдвоенные пневмоколёса. Направление движения машины меняется путём поворота управляемых колёс, поворотом мостов с колёсами в плане, обеспечением различной скорости движения правых и левых колёс и т. п. Привод ведущих колёс может быть общим от механической трансмиссии машины, от самостоятельного ходового электродвигателя или низкомоментного гидромотора через систему передач и валов, а также индивидуальным – от приводных ступичных блоков, встроенных в ступицу каждого колеса (мотор-колеса) и включающих электродвигатель или гидромотор, планетарный редуктор и тормоз. Скорость машины с мотор-колёсами можно плавно регулировать в широком диапазоне в зависимости от дорожных условий и действующих на неё нагрузок. Каждое мотор-колесо может быть поворотным, за счёт чего улучшается маневренность машины. Для разгрузки ходовых устройств строительных экскаваторов, стреловых самоходных кранов, бурильных и других машин, при работе применяют выносные опоры-аутригеры. Масса пневмоколёсных ходовых устройств составляет 10…12% общей массы машины. Гусеничное ходовое оборудование характеризуется хорошим сцеплением с грунтом, высокой тяговой способностью, большой опорной поверхностью, низким удельным давлением на грунт (0, 04…0, 1 МПа), определяющими в комплексе его высокую проходимость, и применяется на машинах, передвигающихся в условиях плохих дорог и бездорожья. Недостатки гусеничного оборудования – тихоходность (не более 10 км/ч при жесткой подвеске), сравнительно большая масса (30…40% от массы машины), сложность конструкции. Гусеничные машины обычно обслуживают объекты с большими объёмами работ. Для транспортирования их с одного объекта на другой применяют пневмоколёсные прицепы-тяжеловозы (трайлеры). В городском строительстве используют машины с двухгусеничным ходовым оборудованием. Гусеничный движитель (рис. 23, а) состоит из гусеничной ленты (цепи) 2 в виде шарнирно соединённых между собой звеньев (пластин, траков), огибающих приводное 1 и направляющее (натяжное) 9 колёса. Последние установлены на концах рамы 7. Нагрузки от машины передаются на нижнюю ветвь гусеничной ленты через движущиеся по ней опорные катки 6. Холостую верхнюю ветвь гусеницы поддерживают и предохраняют от провисания ролики 3. Натяжение гусеничной ленты регулируют винтовым натяжным устройством 8, перемещающим натяжное колесо 9. Для машин, работающих и передвигающихся на слабых, переувлажнённых и заболоченных грунтах, применяют уширенно-удлинённые движители с увеличенной опорной поверхностью гусениц и удельным давлением на грунт 0, 02…0, 03 МПа. По приспособляемости к неровностям опорной поверхности различают жесткие, мягкие и полужёсткие движители. У жёстких движителей опорные катки соединяются непосредственно с рамой (рис. 23, а). Скорость движения машин с жёсткой подвеской – 5…10 км/ч. Рамы жёстких движителей строительных экскаваторов, стреловых самоходных кранов, погрузчиков и других машин жёстко соединены между собой поперечными балками, на которые опирается ходовая рама 5, несущая опорно-поворотный круг 4 и воспринимающая вес и внешние нагрузки машины. У мягких движителей опорные катки укрепляют на балансирах с упругой промежуточной связью, а гусеницы делают со сравнительно мелкими пластинами или сквозными фигурными траками. Машины, снабженные мягким гусеничным ходом, рассчитаны на значительные самостоятельные перемещения. Переднюю часть машины иногда подрессоривают, передавая ее вес на рамы гусениц через листовую поперечную рессору. Такую подвеску называют полужесткой и применяют в гусеничных машинах мощностью до 75 кВт, которые имеют, в основном, транспортно-тяговое назначение. Скорость движения при этом может достигать 35…40 км/ч. Полностью упругую подвеску делают в гусеничных машинах чисто транспортного назначения, например в вездеходах. Она отличается высокой стоимостью и требует внимательного ухода. Привод ведущего колеса каждой гусеницы может быть общим (рис. 23, б, в), от электродвигателя или двигателя внутреннего сгорания через систему передач, а также раздельным (индивидуальным) – от электродвигателя (рис. 23, г) или низкомоментного гидромотора через редуктор. Автоматические и управляемые тормоза привода гусениц обеспечивают торможение, остановку и маневрирование машины. Движение по кривой достигается притормаживанием одной из гусениц, а разворот – движением гусениц в противоположные стороны или полным торможением одной из гусениц.
Рис. 23. Гусеничное ходовое оборудование
Рис. 24. Рельсовое ходовое оборудование
Рельсовое ходовое оборудование (рис. 24) имеют башенные, козловые, мостовые и специальные стреловые самоходные краны, электротали – тельферы, сваебойные установки, мотовозы, дрезины. Оно характеризуется простотой конструкции, небольшими сопротивлениями передвижению, а также малыми маневренностью и скоростью передвижения. Основными элементами рельсового ходового устройства являются размещаемые на рельсах стальные колёса с гладким ободом, снабженным одной или двумя ребордами. Привод ведущих колёс может быть общим от электродвигателя или двигателя внутреннего сгорания через систему валов и передач и индивидуального электродвигателя через редуктор. Приводы оборудуют управляемыми и автоматическими тормозами. Одно или несколько колёс с общей рамой, двигателем, редуктором и тормозом образуют приводную ходовую тележку. Количество колёс в тележке определяется действующей нагрузкой. Приводные и неприводные (без привода) ходовые тележки кранов шарнирно соединяются с опорной рамой и оборудуются противоугонными клещевыми захватами. Для движения по рельсам во время строительных работ могут быть приспособлены обычные автомобили и тракторы. Для этого колесные машины снабжаются навесным устройством с рельсовыми ребордчатыми роликами. В опущенном положении передние и задние ролики удерживают машину в колее. Перемещается же она на собственных колесах с застопоренным рулевым управлением. Тяжелые автомобили при движении по рельсам на таком комбинированном ходу способны везти до десяти груженых вагонов. Гусеничные тракторы для перемещения по рельсам имеют траки, на которые наваривают вертикальные пластины, выполняющие роль реборд. Тракторы проходят не только в пределах обычной колеи, но и по стрелочным переводам. При таком оборудовании они способны перемещаться также по обычному мягкому грунту.
Управление машинами
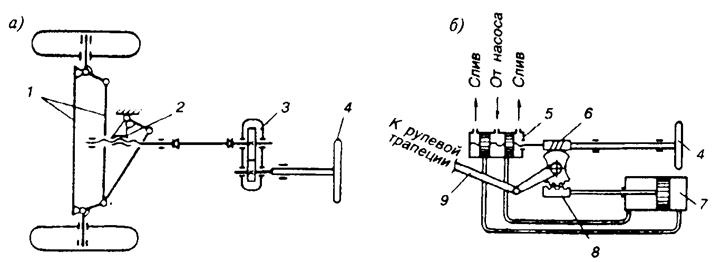
Устройства управления позволяют человеку направлять и регулировать работу машины. Самодействующие устройства, работающие по заданной программе, называются автоматами. Если управление частично производится автоматами, а частично человеком, его называется автоматизированным. Если самодействующее устройство работает циклически, и для каждого нового цикла необходимо вмешательство человека – оно называется полуавтоматическим. Полуавтоматически обычно действуют различные контрольные и предохранительные устройства. В строительных машинах управление подразделяется по нескольким назначениям: - управление двигателем; - управление установкой рабочего оборудования; - управление сцепными муфтами и тормозами; - управление движением всей машины. Управление двигателем сводится к пуску, остановке и регулированию скорости. Для машин, работающих с постоянным числом оборотов (лебедки, грохоты, дробилки, бетоносмесительные агрегаты), управление двигателем сводится к пуску и остановке. Если предусматривается перемена хода (реверсирование), то это достигается электрическим способом (сменой фаз). В транспортных машинах число оборотов двигателя внутреннего сгорания регулируется водителем в широких пределах. Это достигается изменением подачи горючей смеси в цилиндры. Запуск обычно осуществляется от аккумуляторной батареи с помощью стартера, а в дизельных машинах – от двигателя-пускача. Все это не требует чрезмерных усилий от человека. Для перемещения тяжелого рабочего оборудования в процессе управления используется энергия двигателя. Управление муфтами и тормозами может производиться с помощью ручных рычагов и педалей, но в ряде машин физическое воздействие человека усиливается гидравлическими устройствами насосной или безнасосной систем. В управлении движением всей машины необходимо выделить переключение передач и рулевое управление, обеспечивающие направленное движение машины. Рулевое управление воздействует на направляющие колеса или механизм поворота частей корпуса машины. В небольших и сравнительно легких машинах применяют механическое рулевое управление, использующее мускульную силу водителя; в больших и тяжелых машинах – механизмы с гидроусилением и насосные гидросистемы. Системы управления строительных машин по конструктивным признакам разделяются на механические, гидравлические, пневматические, электрические и смешанные (комбинированные). Механическая система обеспечивает связь руки и ноги машиниста с муфтами и тормозами через рычаги и тяги. Такая конструкция надёжна в эксплуатации и имеет высокую чувствительность управления. Основные её недостатки – необходимость приложения значительных мускульных усилий машиниста к рычагам и педалям, быстрая утомляемость машиниста, ведущая к снижению производительности машины, необходимость частых смазок и регулировок быстроизнашивающихся шарнирных соединений тяг и рычагов. Обычно механическая система используется в качестве вспомогательной для управления механизмами, не принимающими участия в выполнении рабочего процесса. Поворот колёс машины в этом случае осуществляется с помощью рулевого управления посредством приложения усилия машиниста к рулевому колесу 4. При этом через механическую передачу 3 (цилиндрическую или червячную пару) и сектор 2, взаимодействующий с винтовым устройством, перемещаются поперечные тяги 1, соединённые с управляемыми колёсами (рис. 25, а). Для облегчения труда машиниста в передаточный механизм рулевого управления включают усилители в виде гидравлического или пневматического цилиндра с поршнем. Действие усилителя основано на том, что при повороте рулевого колеса 4 и наличии нагрузки на тяге рулевой трапеции 9 червяк 6 перемещается в осевом направлении, и золотник распределителя 5 открывает доступ жидкости или воздуху в цилиндр усилителя 7, шток которого, взаимодействуя с рейкой 8, передаёт усилие на тягу 9, соединённую с рулевой трапецией (рис. 25, б).
Рис. 25. Рулевое управление
В гидравлической системеуправления рычаги полностью или частично заменены исполнительными гидроцилиндрами одно- и двустороннего действия, создающими необходимое усилие для включения муфт, тормозов и других механизмов. Различают насосную и безнасосную системы управления. В насосной системе рабочая жидкость подаётся под давлением в исполнительный гидроцилиндр от насоса через распределитель, которым управляет машинист, т.е. так же, как в силовом гидроприводе.
Рис. 26. Схема гидравлического безнасосного управления
В безнасосной системе (рис. 26) давление рабочей жидкости в исполнительном гидроцилиндре одностороннего действия 2 создаётся перемещением поршня гидроцилиндра-преобразователя (датчика) 5, на который через рычаг или педаль 3 воздействует машинист. При снятии усилия с педали поршень датчика возвращается в исходное положение пружиной 4, поршень исполнительного гидроцилиндра – пружиной 1. Безнасосная система проста по конструкции, надёжна в эксплуатации, но так как для её привода требуется мускульная сила, имеет ограниченное применение. Преимущественное распространение получила насосная система управления.
Рис. 27. Схема пневматического управления
Пневматическая система управления отличается от гидравлической насосной тем, что в ней вместо жидкости используется сжатый в компрессоре до 0, 7…0, 8 МПа воздух. Исполнительными органами такой системы (рис. 27) являются пневмоцилиндры 4 и пневмокамеры 5 одностороннего действия, подвижные элементы которых – поршень или диафрагма со штоком – передают усилие включаемому механизму. Возврат штока в исходное положение обеспечивается пружиной при снятом давлении. Работой пневмоцилиндров и камер управляют с помощью регулируемых и нерегулируемых пневмоаппаратов 3. Нерегулируемый крановый пневмоаппарат соединяет ресивер 2 компрессора 1 с рабочей полостью пневмоцилиндра (камеры) без изменения давления сжатого воздуха. Регулируемый пневмоаппарат позволяет изменить давление воздуха в исполнительном органе, обеспечивая повышенную плавность включения механизма. По сравнению с гидравлической пневматическая система управления обеспечивает более высокую плавность включения. Основные её недостатки – сравнительно большие размеры исполнительных органов из-за низкого давления в системе и возможность замерзания конденсата, содержащегося в сжатом воздухе. Электрическая система управления применяется в машинах с индивидуальным электрическим приводом механизмов и обеспечивает пуск и останов электродвигателей, регулирование частоты и вращения, реверсирование, безопасную работу. В состав такой системы входят магнитные пускатели, контроллеры, реле различных типов, автоматические выключатели, кнопки управления «Пуск» и «Стоп», блокирующие устройства, тормозные электромагниты и т.п. Электрические системы управления надёжны, просты и удобны в эксплуатации, обеспечивают дистанционное управление механизмами и всей машиной в целом, создают возможность автоматизации работы машин. С целью частичной или полной автоматизации управления машинами применяют комбинированные системы – гидропневматические, гидроэлектрические, гидропневмоэлектрические и ряд других. Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1699; Нарушение авторского права страницы








 ,
,  ,
,