
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ИССЛЕДОВАНИЕ СОЛЕНОИДНОГО ЭЛЕКТРОМАГНИТНОГО ПРИВОДА
Основные положения В системах электроавтоматики и телемеханики широко распространены двухпозиционные исполнительные элементы, работающие по принципу «включено – выключено». К ним относятся реле, контакторы, электромагнитные муфты и соленоидные электромагнитные приводы. Принципы работы электромагнитных муфт, осуществляющих соединение двух вращающихся валов, достаточно подробно рассматриваются в курсе электропривода, поскольку они широко распространены и в неавтоматизированных системах управления. Значительно больший интерес как исполнительные элементы автоматических систем представляют электромагнитные соленоидные приводы, преобразующие энергию электрического тока в поступательное механическое движение регулирующего органа. Соленоидные электромагнитные приводы строятся обычно как двухпозиционные исполнительные элементы. Вообще говоря, возможно создание многопозиционных исполнительных элементов соленоидного типа. Однако при этом конструкция исполнительного элемента резко усложняется, что приводит к увеличению его стоимости и уменьшению надежности, и поэтому многопозиционные соленоидные исполнительные элементы практически в системах автоматики и телемеханики не используются. Соленоидные исполнительные элементы по сравнению с электродвигателями отличаются простотой конструкции и схемы управления, а также меньшей стоимостью. Основными их недостатками являются двухпозиционный принцип действия и непропорционально резкое возрастание габаритов и весов при увеличении номинальной мощности срабатывания. Чаще всего соленоидные исполнительные элементы применяются для управления регулирующими органами (типа вентилей, задвижек, золотников и др.) пневматических и гидравлических двигателей, которые требуют относительно малого тягового усилия при поступательном перемещении. Все соленоидные исполнительные элементы можно подразделить на две группы. У элементов одной группы катушка соленоида рассчитана на длительное обтекание током, у элементов второй группы – на кратковременное действие. У элементов первой группы при включении катушки соленоида регулирующий орган поступательно перемещается в одном направлении, а при выключении – в противоположном. Недостатками исполнительных элементов этой группы является, с одной стороны, большое потребление энергии, а с другой – возможность произвольного срабатывания регулирующего органа при исчезновении питания в цепи катушки соленоида.
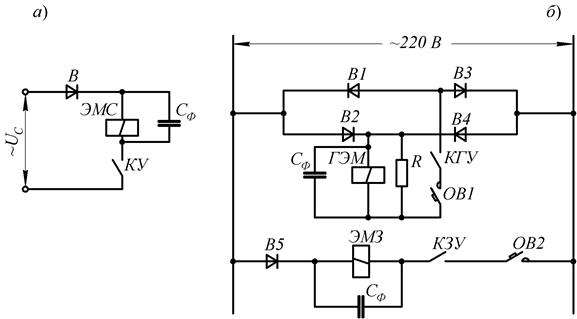
Рис. 21
Соленоидные исполнительные элементы второй группы имеют две катушки: катушку главного электромагнита, предназначенного для открывания регулирующего органа (клапана, задвижки и т. д.), и катушку электромагнита защелки. При подаче тока в катушку главного электромагнита якорь соленоида втягивается в катушку и открывает регулирующий орган. В момент прихода якоря в конечное положение срабатывает специальная защелка, отключая источник питания катушки главного электромагнита (например, с помощью конечного выключателя). Для закрывания (обратного перемещения) регулирующего органа подается питание в катушку электромагнита защелки, при срабатывании которого регулирующий орган под действием собственного веса или возвратной пружины возвращается в исходное состояние, отключая с помощью конечного выключателя цепь питания электромагнита защелки. Недостатком соленоидных исполнительных элементов второй группы, как это следует из изложенного выше, является усложнение конструкции и схемы управления. Принцип построения схемы управления соленоидными исполнительными элементами первой группы показан на рис. 21, а, а элементами второй группы – на рис. 21, б. Как видно из рис. 21, а, при замыкании управляющего контакта КУ (например, контакта реле или контактора в цепи выходной цепи автоматической системы) через вентиль В подается питание на катушку электромагнитного соленоида ЭМС и соленоид срабатывает. Конденсатор значительной емкости Сф подключен для сглаживания пульсаций выпрямленного напряжения, что способствует более надежной работе соленоида. В схеме, показанной на рис. 21, б, питание на катушку главного электромагнита ГЭМ подается от сети переменного тока через двухполупериодный выпрямитель, собранный на полупроводниковых диодах B1 – B4по схеме Гретца. Для сглаживания пульсаций параллельно катушке ГЭМ включены резистор R и конденсатор Сф. Питание па катушку ГЭМ подается при срабатывании главного управляющего контакта КГУ. После того как главный электромагнит сработает, цепь питания катушки автоматически разрывается выключателем 0В1. Электромагнит защелки ЭМЗ питается от однополупериодного выпрямителя, построенного на полупроводниковом диоде В5. Питание на катушку ЭМЗ поступит, если сработает управляющий контакт защелки КЗУ выходной цепи автоматической системы. После того как электромагнит ЭМЗ сработает, его цепь питания разрывается оконечным выключателем 0В2, и т. д.
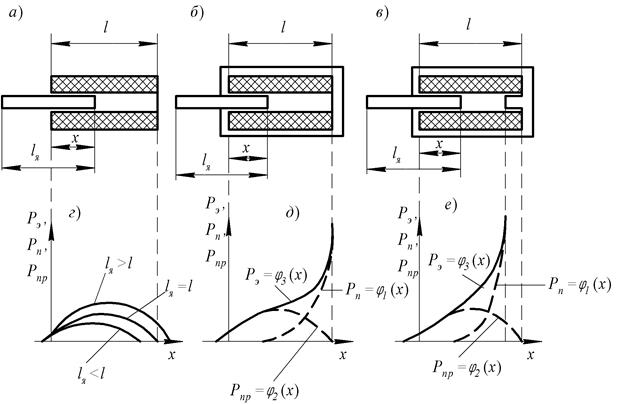
Рис. 22
В качестве исполнительных элементов систем автоматики могут применяться соленоиды с разомкнутой (рис. 22, а) и замкнутой (рис. 22, б и в)магнитной системой. В обоих случаях соленоид представляет собой катушку с равномерным распределением витков w по ее длине l, внутри которой перемещается стальной сердечник – якорь соленоида. При введении якоря в поле Фс катушки в соленоиде с разомкнутой магнитной системой (рис. 22, а) появляется поток Фу, перпендикулярный оси якоря. Взаимодействие магнитных потоков Фс и Фу создает тяговое усилие Рэ, стремящееся втянуть якорь в катушку. Величина тягового усилия при перемещении якоря изменяется, поскольку при этом происходит изменение магнитной энергии системы. Допустим, что якорь переместился на величину dx, а изменение электромагнитной энергии оказалось равным dWЭ. Тогда созданное при этом тяговое усилие будет равно
где Iк – ток в катушке соленоида;
Строго говоря, величина тока Iк при перемещении якоря будет несколько изменяться, но для простоты можно считать, что Iк = const. Величина полного потокосцепления
где w – число витков катушки соленоида;
В – магнитная индукция, создаваемая потоком Фу; у – периметр якоря (если якорь цилиндрический, то х – величина перемещения якоря; Вух – величина поперечного потока Фу. Согласно (1) и (2) тяговое усилие Рэ соленоида будет равно
Формулу (3), учитывая, что величина
Поток Фу по мере втягивания якоря изменяется по сложному закону (величина Фу зависит от величины перемещения х, от соотношения длин катушки l и якоря lЯ и т. д.). Общий вид семейства тяговых характеристик соленоида с разомкнутой магнитной системой показан на рис. 22, г. Из этого рисунка видно, что наибольшую длину участка характеристики Рэ = φ (х), где Рэ мало зависит от величины х, имеют соленоиды, у которых якорь удлинен (lЯ > l). Это часто используется на практике. Для увеличения тягового усилия катушку соленоида обычно помещают в стальной кожух без фланцев. В этом случае магнитное сопротивление RМ уменьшается и потоки Фу и Фс возрастают без увеличения тока IК. В соленоидах с замкнутой магнитной цепью (рис. 22, б и в) на якорь действуют два магнитных потока: поток Фу, перпендикулярный оси якоря, и поток Фя вдоль оси якоря. Тяговое усилие Рэ создается векторной суммой этих потоков. Поскольку магнитопровод соленоида не насыщен, можно воспользоваться методом суперпозиции и рассматривать действие потоков раздельно. Будем полагать также, что ток в катушке соленоида IК = const. В этом случае можно считать, что суммарное тяговое усилие равно
где РП – поперечное тяговое усилие, создаваемое потоком Фя;
Примерный вид характеристик Тяговое усилие, развиваемое соленоидом со стопом, можно подсчитать по формуле
где G – магнитная проводимость в воздушном зазоре. В свою очередь магнитная проводимость G, как известно, может быть найдена по формуле
где S0 – площадь поперечного сечения якоря соленоида;
Если якорь соленоида имеет в поперечном сечении форму прямоугольника, то Подставляя значение G из формулы (7) в формулу (6), получаем
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 1742; Нарушение авторского права страницы
 (1)
(1) – полное потокосцепление катушки с якорем.
– полное потокосцепление катушки с якорем. (2)
(2) – число витков, охватываемых потоком Фу;
– число витков, охватываемых потоком Фу;  , где
, где  – диаметр якоря);
– диаметр якоря);  (3)
(3) представляет собой напряженность магнитного поля катушки соленоида Н, можно представить в виде
представляет собой напряженность магнитного поля катушки соленоида Н, можно представить в виде (4)
(4) (5)
(5) – продольное тяговое усилие, создаваемое потоком Фу.
– продольное тяговое усилие, создаваемое потоком Фу. ,
,  и
и  показан на рис. 22, д и е. В соленоиде, изображенном на рис. 22, б, стопором является наружный фланец стального кожуха. Для получения тяговой характеристики
показан на рис. 22, д и е. В соленоиде, изображенном на рис. 22, б, стопором является наружный фланец стального кожуха. Для получения тяговой характеристики  , более близкой к линейной, к наружному фланцу прикрепляют неподвижный сердечник – стоп (см. рис. 22, в). При этом характеристика
, более близкой к линейной, к наружному фланцу прикрепляют неподвижный сердечник – стоп (см. рис. 22, в). При этом характеристика  сдвигается влево, как показано на рис. 22, а, что в свою очередь вызывает сдвиг суммарной характеристики
сдвигается влево, как показано на рис. 22, а, что в свою очередь вызывает сдвиг суммарной характеристики  (6)
(6) (7)
(7) – магнитная проницаемость воздуха.
– магнитная проницаемость воздуха. , если же в поперечнике якорь имеет форму круга, то
, если же в поперечнике якорь имеет форму круга, то  (у – периметр якоря,
(у – периметр якоря,  – радиус якоря).
– радиус якоря). (8)
(8)