|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Общие сведения о регуляторах
СОДЕРЖАНИЕ 1. ВВЕДЕНИЕ 2. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ 2.1.Общие сведения о регулирующих устройствах 2.2.Назначение, устройство и работа регулятора 2.3.Настройка регулятора 2.4.Техническое обслуживание регулятора 2.5.Технологическая карта на обслуживание прибора 3. ЭКОНОМИЧЕСКАЯ ЧАСТЬ 4. ОХРАНА ТРУДА 4.1.Охрана труда для прибориста 4.2.Электробезопасность для прибориста 5. ОПИСАНИЕ БАЗЫ ПРАКТИКИ 5.1.Историческая справка 5.2.Оснащение предприятия средствами автоматизации и контрольно-измерительными приборами 6. ЗАКЛЮЧЕНИЕ СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ Общие сведения о регуляторах Промышленностью выпускается большое количество различных автоматических регуляторов, предназначенных для регулирования температуры, давления, расхода, уровня, состава веществ. Автоматические регуляторы разделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действие управляют регулирующим органом за счет энергии, получаемой от регулируемой среды. Область применения этих регуляторов ограничена. Они не приспособлены к переходу на дистанционное управление регулирующим органом, не способны развить значительных усилий, а также не могут производить сложного регулирующего воздействия. Регуляторы непрямого действия по виду энергии, потребляемой от постороннего источника, разделяются на гидравлические, пневматические, электрические и комбинированные. Гидравлические регуляторы применяются в металлургической, химической и энергетической промышленности. Они характеризуются высокой эксплуатационной надежностью и простой конструкции. К положительным свойствам этих регуляторов следует отнести их способность развивать значительные перестановочные усилия и отсутствие выбегов. Пневматические регуляторы особенно широко распространены там, где возможно возникновение пожаров и взрывов. Например, в нефтяной и газовой промышленности почти исключительно применяют пневматические регуляторы. Пневматические регуляторы, также, как и гидравлические, характеризуются высокой эксплуатационной надежностью и сравнительной простотой обслуживания. Электрические регуляторы наиболее широко применяются в различных производствах. Большим преимуществом этих регуляторов по сравнению с гидравлическими и пневматическими является возможность передачи командных импульсов от регулятора к промежуточным устройствам и исполнительному механизму на практически неограниченные расстояния с минимальных запаздыванием передачи. Конструкции и способ действия электрических регуляторов весьма разнообразна. В соответствии с классификацией автоматических систем автоматические регуляторы делят на: 1) стабилизирующие, программные, следящие, самонастраивающиеся 2) реагирующие на отклонение регулируемого параметра или возмущения, а также того и другого 3) релейные, непрерывного действия, импульсные Наиболее распространение в промышленности получили стабилизирующие автоматические регуляторы непрерывного действие и релейные, реагирующие на отклонение регулируемой величины и использующие для воздействия на исполнительный механизм электрическую энергию или энергию сжатого воздуха. Проверка правильности выбора регулятора производится на основе соображений технологического и эксплуатационного характера. Вопрос о правильности выбора управляющего сигнала решается на основании анализа динамических характеристик объекта регулирования. Простейшим критерием оценки в этом случае является отношение времени запаздывания объекта tк его постоянной времени T. Так, при t/T< 0, 2 применяют релейный регулятор, при t/T> 0, 2– регулятор непрерывного действия иди импульсный. Релейные регуляторы выдают сигнал, который обеспечивает перемещение регулирующего органа в одном из фиксированных положений. Таких положений может быть два три и более. По их количеству различают двух- трех – многопозиционные регуляторы.
Назначение прибора Одноканальный измеритель ПИД-регулятор микропроцессорный ТРМ12 совместно с первичным преобразователем (датчиком) предназначен для измерения и регулирования температуры и других физических параметров, значение которых внешним датчиком может быть преобразовано в сигналы постоянного тока или напряжения. Прибор может использоваться для измерения и регулирования технологических параметров в различных отраслях промышленности, коммунального и сельского хозяйства. Прибор может быть применен на промышленных объектах, подконтрольных Рос технадзору. Прибор позволяет осуществлять следующие функции: измерение температуры или других физических величин (давления, влажности, расхода, уровня и т.п.) в одной точке с помощью стандартного датчика, подключаемого к универсальному входу прибора; отображение текущего измерения на встроенном светодиодном цифровом индикаторе управление электроприводом запорно-регулирующего (КЗР) или трехходового клапана без учета его положения, а также системой «нагреватель-холодильник регулирование измеряемой величины по пропорционально-интегрально дифференциальному (ПИД) закону в системе нагреватель–холодильник или по пропорционально-интегральному (ПИ) закону для КЗР автоматическое определение коэффициентов ПИД-регулятора (авто настройка).
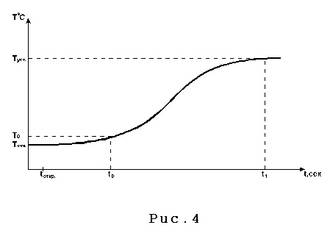
Настройка прибора Для вычисления вышеперечисленных параметров следует снять переходную характеристику объекта. Для этого переводят управление электроприводом из автоматического в ручной режим (s=0). Вначале необходимо вывести задвижку в крайнее закрытое положение и дождаться, пока температура достигнет некоторого установившегося значения Тнач. Определить величину То по формуле: То = 0, 03(Туст - Тнач) +Тнач, где Туст - заданная для поддержания температура. Затем задвижка выводится в положение, необходимое для поддержания температуры, близкой к уставке Туст, замеряя при этом время движения задвижки tоткр. Контролируя время по секундомеру, а температуру по индикатору ТРМ12, определяют время tо (транспортное запаздывание), необходимое для достижения температуры То, и время t1, необходимое для достижения температуры Туст (рис. 4). Для точного определения коэффициентов желательно, чтобы разность между Туст и Тнач составляла не менее 20оС. Далее по формулам можно определить примерное значение параметров:
В процессе настройки, исходя из полученного переходного процесса, коэффициенты ПИД-регулятора и шаг регулирования могут быть изменены с целью достижения оптимального регулирования. Чтобы избежать перерегулирования при включении установки следует предусмотреть ограничитель открытия задвижки, в качестве которого обычно используют концевой выключатель. Ниже приведены некоторые графики переходных процессов, возникающих при неправильном выборе коэффициентов ПИД-регулятора. При включении установки наблюдается значительное перерегулирование, а затем долгое слабозатухающее колебание температуры вокруг уставки.
Возможные причины: - слишком большой коэффициент усиления k. На незначительное рассогласование формируется импульс большой длительности Di = k(E+tDE). В результате задвижка все время «проскакивает» мимо некоторого среднего, оптимального положения; Объект очень долго выходит на уставку или очень долго возвращается на уставку после плавного изменения температуры в результате возмущающего воздействия. Причина этого в том, что коэффициент усиления k слишком мал. В результате
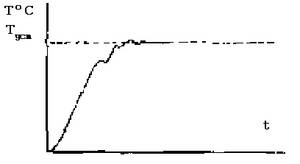
Несмотря на значительное рассогласование Е, длительность управляющего импульса оказывается слишком мала для того, чтобы его компенсировать. Достаточно большой коэффициент при дифференциальной составляющей делает прибор чувствительным к резким изменениям температуры объекта и ведет к быстрому
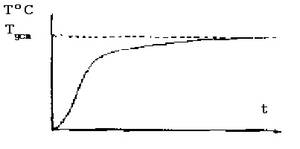
затуханию колебаний температуры, однако если t слишком велик, прибор очень сильно изменяет длительность, а иногда и полярность управляющих импульсов при малейшем изменении величины DE. Поэтому при выходе на уставку температура растет не плавно, а рывками. Особенно это становится заметно вблизи уставки. Оптимальная настройка коэффициентов ТРМ12 позволяет максимально быстро и почти без перерегулирования вывести объект на уставку.
Признаками правильного выбора коэффициентов является плавный, без рывков рост температуры и наличие тормозящих импульсов при подходе к уставке как снизу, так и сверху. Если объект выходит на уставку с небольшим перерегулированием и быстро затухающими колебаниями, можно немного уменьшить коэффициент усиления k, оставив все остальные параметры без изменения.
Техническое обслуживание Техническое обслуживание прибора проводится не реже одного раза в шесть месяцев и состоит в проверке крепления прибора, винтовых соединений, а также удалении пыли и грязис клеммника прибора. Поверку прибора проводят органы, аккредитованные на право поверки. Требования к поверке, порядок, основные этапы проведения определяются методикой МИ 3067-2007. Методика поверки поставляется по требованию заказчика. Меж поверочный интервал – 3 года. Маркировка прибора На каждый прибор наносятся: наименование предприятия-изготовителя; обозначение прибора и его модификации; обозначение классов точности; изображение знака утверждения типа средства измерения; обозначение напряжения и частоты питания; год изготовления; штрих-код с информацией о приборе. Упаковка прибора Упаковка прибора производится в соответствии с ГОСТ 23088-80 в потребительскую тару, выполненную из коробочного картона по ГОСТ 7933-89. Упаковка изделий при пересылке почтой по ГОСТ 9181-74. 10 Транспортирование и хранение Транспортирование прибора в упаковке допускается при следующих условиях: температура окружающего воздуха от –25 до +55 °С с соблюдением мер защиты от ударов и вибраций; относительная влажность воздуха не более 95 % при температуре +35 °С и более низких температурах без конденсации влаги; транспортирование допускается всеми видами закрытого транспорта; транспортирование авиатранспортом должно производиться в отапливаемых герметичных отсеках. Хранение прибора в упаковке допускается при следующих условиях: температура окружающего воздуха от +5 до +40 °С; относительная влажность воздуха не более 80 % при температуре +35 °С; хранить прибор необходимо в картонной таре в закрытых отапливаемых помещениях.
ЭКОНОМИЧЕСКАЯ ЧАСТЬ ОХАРАНА ТРУДА ОПИСАНИЕ БАЗЫ ПРАКТИКИ 5.1. Историческая справка ЗАКЛЮЧЕНИЕ Борозняк И. Г., Юров П. И. Ремонт и поверка первичных контрольно-измерительных приборов.
Котюк А. Ф. Датчики в современных измерениях.
Шкатов Е. Ф. Технологические измерения и КИП на предприятиях химической промышленности.
Иванов Б. К. Слесарь по контрольно-измерительным приборам и автоматике.
Калиниченко А. В. Справочник инженера по контрольно-измерительным приборам и автоматике.
СОДЕРЖАНИЕ 1. ВВЕДЕНИЕ 2. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ 2.1.Общие сведения о регулирующих устройствах 2.2.Назначение, устройство и работа регулятора 2.3.Настройка регулятора 2.4.Техническое обслуживание регулятора 2.5.Технологическая карта на обслуживание прибора 3. ЭКОНОМИЧЕСКАЯ ЧАСТЬ 4. ОХРАНА ТРУДА 4.1.Охрана труда для прибориста 4.2.Электробезопасность для прибориста 5. ОПИСАНИЕ БАЗЫ ПРАКТИКИ 5.1.Историческая справка 5.2.Оснащение предприятия средствами автоматизации и контрольно-измерительными приборами 6. ЗАКЛЮЧЕНИЕ СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ Общие сведения о регуляторах Промышленностью выпускается большое количество различных автоматических регуляторов, предназначенных для регулирования температуры, давления, расхода, уровня, состава веществ. Автоматические регуляторы разделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действие управляют регулирующим органом за счет энергии, получаемой от регулируемой среды. Область применения этих регуляторов ограничена. Они не приспособлены к переходу на дистанционное управление регулирующим органом, не способны развить значительных усилий, а также не могут производить сложного регулирующего воздействия. Регуляторы непрямого действия по виду энергии, потребляемой от постороннего источника, разделяются на гидравлические, пневматические, электрические и комбинированные. Гидравлические регуляторы применяются в металлургической, химической и энергетической промышленности. Они характеризуются высокой эксплуатационной надежностью и простой конструкции. К положительным свойствам этих регуляторов следует отнести их способность развивать значительные перестановочные усилия и отсутствие выбегов. Пневматические регуляторы особенно широко распространены там, где возможно возникновение пожаров и взрывов. Например, в нефтяной и газовой промышленности почти исключительно применяют пневматические регуляторы. Пневматические регуляторы, также, как и гидравлические, характеризуются высокой эксплуатационной надежностью и сравнительной простотой обслуживания. Электрические регуляторы наиболее широко применяются в различных производствах. Большим преимуществом этих регуляторов по сравнению с гидравлическими и пневматическими является возможность передачи командных импульсов от регулятора к промежуточным устройствам и исполнительному механизму на практически неограниченные расстояния с минимальных запаздыванием передачи. Конструкции и способ действия электрических регуляторов весьма разнообразна. В соответствии с классификацией автоматических систем автоматические регуляторы делят на: 1) стабилизирующие, программные, следящие, самонастраивающиеся 2) реагирующие на отклонение регулируемого параметра или возмущения, а также того и другого 3) релейные, непрерывного действия, импульсные Наиболее распространение в промышленности получили стабилизирующие автоматические регуляторы непрерывного действие и релейные, реагирующие на отклонение регулируемой величины и использующие для воздействия на исполнительный механизм электрическую энергию или энергию сжатого воздуха. Проверка правильности выбора регулятора производится на основе соображений технологического и эксплуатационного характера. Вопрос о правильности выбора управляющего сигнала решается на основании анализа динамических характеристик объекта регулирования. Простейшим критерием оценки в этом случае является отношение времени запаздывания объекта tк его постоянной времени T. Так, при t/T< 0, 2 применяют релейный регулятор, при t/T> 0, 2– регулятор непрерывного действия иди импульсный. Релейные регуляторы выдают сигнал, который обеспечивает перемещение регулирующего органа в одном из фиксированных положений. Таких положений может быть два три и более. По их количеству различают двух- трех – многопозиционные регуляторы.
Назначение прибора Одноканальный измеритель ПИД-регулятор микропроцессорный ТРМ12 совместно с первичным преобразователем (датчиком) предназначен для измерения и регулирования температуры и других физических параметров, значение которых внешним датчиком может быть преобразовано в сигналы постоянного тока или напряжения. Прибор может использоваться для измерения и регулирования технологических параметров в различных отраслях промышленности, коммунального и сельского хозяйства. Прибор может быть применен на промышленных объектах, подконтрольных Рос технадзору. Прибор позволяет осуществлять следующие функции: измерение температуры или других физических величин (давления, влажности, расхода, уровня и т.п.) в одной точке с помощью стандартного датчика, подключаемого к универсальному входу прибора; отображение текущего измерения на встроенном светодиодном цифровом индикаторе управление электроприводом запорно-регулирующего (КЗР) или трехходового клапана без учета его положения, а также системой «нагреватель-холодильник регулирование измеряемой величины по пропорционально-интегрально дифференциальному (ПИД) закону в системе нагреватель–холодильник или по пропорционально-интегральному (ПИ) закону для КЗР автоматическое определение коэффициентов ПИД-регулятора (авто настройка).
Настройка прибора Для вычисления вышеперечисленных параметров следует снять переходную характеристику объекта. Для этого переводят управление электроприводом из автоматического в ручной режим (s=0). Вначале необходимо вывести задвижку в крайнее закрытое положение и дождаться, пока температура достигнет некоторого установившегося значения Тнач. Определить величину То по формуле: То = 0, 03(Туст - Тнач) +Тнач, где Туст - заданная для поддержания температура. Затем задвижка выводится в положение, необходимое для поддержания температуры, близкой к уставке Туст, замеряя при этом время движения задвижки tоткр. Контролируя время по секундомеру, а температуру по индикатору ТРМ12, определяют время tо (транспортное запаздывание), необходимое для достижения температуры То, и время t1, необходимое для достижения температуры Туст (рис. 4). Для точного определения коэффициентов желательно, чтобы разность между Туст и Тнач составляла не менее 20оС. Далее по формулам можно определить примерное значение параметров:
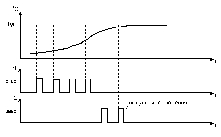
В процессе настройки, исходя из полученного переходного процесса, коэффициенты ПИД-регулятора и шаг регулирования могут быть изменены с целью достижения оптимального регулирования. Чтобы избежать перерегулирования при включении установки следует предусмотреть ограничитель открытия задвижки, в качестве которого обычно используют концевой выключатель. Ниже приведены некоторые графики переходных процессов, возникающих при неправильном выборе коэффициентов ПИД-регулятора. При включении установки наблюдается значительное перерегулирование, а затем долгое слабозатухающее колебание температуры вокруг уставки.
Возможные причины: - слишком большой коэффициент усиления k. На незначительное рассогласование формируется импульс большой длительности Di = k(E+tDE). В результате задвижка все время «проскакивает» мимо некоторого среднего, оптимального положения; Объект очень долго выходит на уставку или очень долго возвращается на уставку после плавного изменения температуры в результате возмущающего воздействия. Причина этого в том, что коэффициент усиления k слишком мал. В результате
Несмотря на значительное рассогласование Е, длительность управляющего импульса оказывается слишком мала для того, чтобы его компенсировать. Достаточно большой коэффициент при дифференциальной составляющей делает прибор чувствительным к резким изменениям температуры объекта и ведет к быстрому
затуханию колебаний температуры, однако если t слишком велик, прибор очень сильно изменяет длительность, а иногда и полярность управляющих импульсов при малейшем изменении величины DE. Поэтому при выходе на уставку температура растет не плавно, а рывками. Особенно это становится заметно вблизи уставки. Оптимальная настройка коэффициентов ТРМ12 позволяет максимально быстро и почти без перерегулирования вывести объект на уставку.
Признаками правильного выбора коэффициентов является плавный, без рывков рост температуры и наличие тормозящих импульсов при подходе к уставке как снизу, так и сверху. Если объект выходит на уставку с небольшим перерегулированием и быстро затухающими колебаниями, можно немного уменьшить коэффициент усиления k, оставив все остальные параметры без изменения.
Техническое обслуживание Техническое обслуживание прибора проводится не реже одного раза в шесть месяцев и состоит в проверке крепления прибора, винтовых соединений, а также удалении пыли и грязис клеммника прибора. Поверку прибора проводят органы, аккредитованные на право поверки. Требования к поверке, порядок, основные этапы проведения определяются методикой МИ 3067-2007. Методика поверки поставляется по требованию заказчика. Меж поверочный интервал – 3 года. Маркировка прибора На каждый прибор наносятся: наименование предприятия-изготовителя; обозначение прибора и его модификации; обозначение классов точности; изображение знака утверждения типа средства измерения; обозначение напряжения и частоты питания; год изготовления; штрих-код с информацией о приборе. Упаковка прибора Упаковка прибора производится в соответствии с ГОСТ 23088-80 в потребительскую тару, выполненную из коробочного картона по ГОСТ 7933-89. Упаковка изделий при пересылке почтой по ГОСТ 9181-74. 10 Транспортирование и хранение Транспортирование прибора в упаковке допускается при следующих условиях: температура окружающего воздуха от –25 до +55 °С с соблюдением мер защиты от ударов и вибраций; относительная влажность воздуха не более 95 % при температуре +35 °С и более низких температурах без конденсации влаги; транспортирование допускается всеми видами закрытого транспорта; транспортирование авиатранспортом должно производиться в отапливаемых герметичных отсеках. Хранение прибора в упаковке допускается при следующих условиях: температура окружающего воздуха от +5 до +40 °С; относительная влажность воздуха не более 80 % при температуре +35 °С; хранить прибор необходимо в картонной таре в закрытых отапливаемых помещениях.
Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 1745; Нарушение авторского права страницы