
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Микромеханические гироскопические датчики
Информации Как было указано в первой главе, экономический критерий, определяющий целесообразность производства того или иного вида гироскопической техники, обусловил интерес к новым образцам инерциальных датчиков информации – микромеханическим гироскопам (ММГ) и акселерометрам (ММА). Разработка ММГ началась с середины 80 годов [34] и в настоящее время многие фирмы в России и за рубежом уже освоили их производство. В качестве примеров таких изделий можно назвать [34, 45]: кремниевые ММГ и ММА фирмы " Rockwell International", разработанные в лаборатории им. Ч. Дрейпера (США); кварцевые ММГ и ММА фирмы " Systran Donner" (США); пьезокерамические ММГ фирмы " Murata" (Япония). Среди отечественных фирм, занимающихся разработкой подобных датчиков, следует выделить: ЦНИИ машиностроения, НИИ прикладной механики им. академика В.И.Кузнецова, НПК " Вектор" (все - г. Москва); НИИ командных приборов, Центр микротехники и диагностики России, ГУАП, АОЗТ “Гирооптика” (все г. С. – Петербург) НПП “Темп-Авиа” (г. Арзамас). Принципиальной особенностью этих датчиков является использование при их производстве материалов и технологий современной твердотельной микроэлектроники. Микромеханические инерциальные датчики имеют встроенную электронику управления и обработки информации, малую массу и габариты (доли миллиграммов и единицы миллиметров [8]), малое энергопотребление (доли милливатт), высокую устойчивость к внешним воздействиям. Используемая технология обеспечивает массовое производство и, как следствие этого, уникально низкую стоимость (единицы и десятки долларов) микромеханических датчиков.
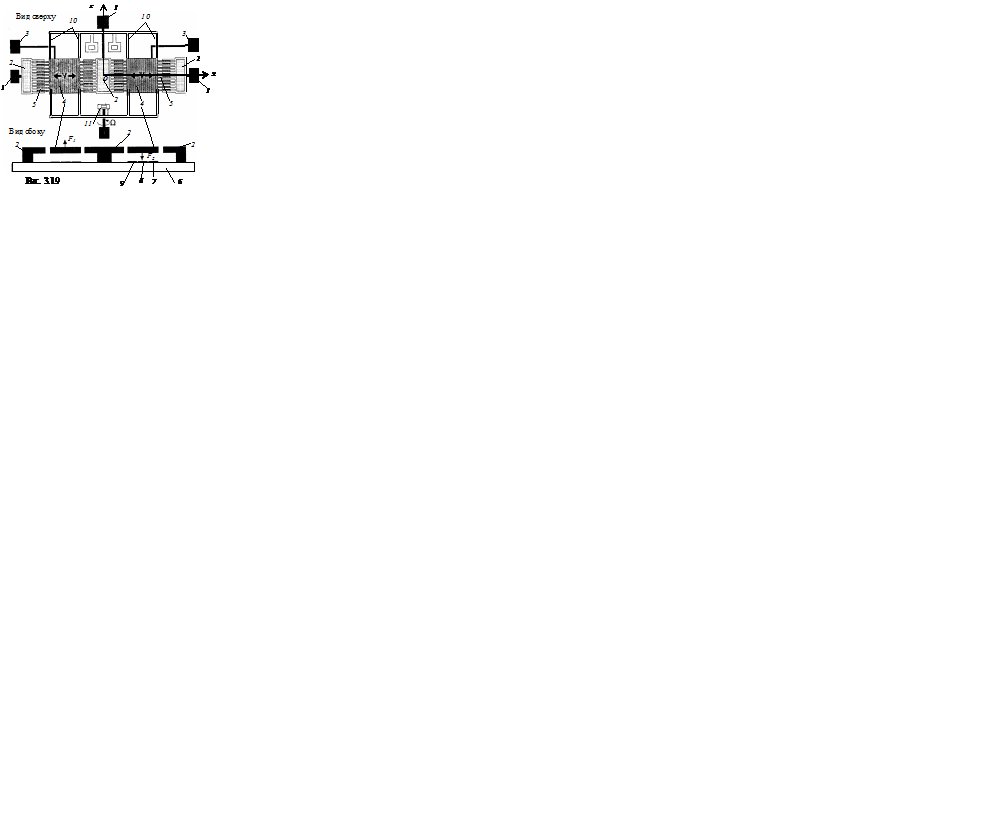
На рис. 3.19 в двух проекциях представлена конструктивная схема ММГ камертонного типа. В плане размеры этого датчика составляют, примерно, 2х4 мм, а его толщина – 20 мкм [7].
При наличии вращения основания с угловой скоростью Ω вокруг оси oz, возникают силы F1 и F2 кориолиса, вынуждающие перемещаться инерционные массы. Это приводит к повороту ЧЭ вокруг оси oz на угол φ и смещению масс относительно его плоскости на величину у. В связи с тем, что смещение х инерционных масс носит периодический характер, закон изменения угла φ и смещения у также будет периодическим. Частота указанных колебаний будет определяться частотой питания электростатических двигателей, а их амплитуда, как и у камертонного гироскопа, рассмотренного в параграфе 2.4, будет зависеть от угловой скорости Ω . При исследовании работы прибора в первом приближении можно считать, что параметры колебаний чувствительного элемента в основном определяются моментами сил кориолиса, что позволяет записать уравнение, этих колебаний в следующем виде [8]:
Популярное: |
Последнее изменение этой страницы: 2017-03-08; Просмотров: 534; Нарушение авторского права страницы
 ММГ, как правило, строится по схеме камертона (см. п. 2.14). Отличительная особенность заключается в миниатюризации конструкции, использовании высокодобротных неметаллических материалов (монокристаллический кремний, плавленый кварц) и технологий фотолитографии и диффузионного травления. Вибрации возбуждаются либо пьезоэлектрическим датчиком, либо микродвигателем электростатического типа. Датчики съема и преобразования полезного сигнала и другие встроенные элементы цепей управления также выполняются на основе современной микроэлектронной технологии. Наряду с камертонной схемой подвеса чувствительного элемента имеются схемы, аналогичные динамически настраиваемым гироскопам, с той лишь разницей, что в ММГ ротор не вращается, а совершает колебания вокруг главной оси. Рассмотрим более подробно некоторые варианты построения ММГ.
ММГ, как правило, строится по схеме камертона (см. п. 2.14). Отличительная особенность заключается в миниатюризации конструкции, использовании высокодобротных неметаллических материалов (монокристаллический кремний, плавленый кварц) и технологий фотолитографии и диффузионного травления. Вибрации возбуждаются либо пьезоэлектрическим датчиком, либо микродвигателем электростатического типа. Датчики съема и преобразования полезного сигнала и другие встроенные элементы цепей управления также выполняются на основе современной микроэлектронной технологии. Наряду с камертонной схемой подвеса чувствительного элемента имеются схемы, аналогичные динамически настраиваемым гироскопам, с той лишь разницей, что в ММГ ротор не вращается, а совершает колебания вокруг главной оси. Рассмотрим более подробно некоторые варианты построения ММГ. Инерционные массы 4, подвешенные в прямоугольной рамке с помощью четырех торсионов 10 и образующие с ней чувствительный элемент (ЧЭ), связаны с основанием 6 в так называемой якорной точке 11 с помощью упругих элементов. Эти элементы играют роль ножки в обычном камертонном гироскопе (п. 2.14), позволяя ЧЭ поворачиваться вокруг оси oz на небольшие углы. В рабочем состоянии массы 4 приводятся в колебательное движение с резонансной частотой и линейной скоростью V электростатическими двигателями 2. С этой целью и двигатели и массы 4 имеют специальные гребешки 5, образующие в собранном состоянии воздушные конденсаторы. При подаче переменного напряжения на обкладки этих конденсаторов возникают силы F (рис.3.20), обусловленные взаимодействием электрических полей, порождающие названное движение.Всего используется три двигателя, два из которых расположены слева и справа датчика, а один в его центре. При отсутствии вращения прибора колебания инерционных масс происходят во взаимно противоположных направлениях в плоскости, параллельной его основанию. Уравнения, определяющие эти колебания, учитывая кинематическую схему прибора, представленную на рис. 3.20, могут быть записаны в виде:
Инерционные массы 4, подвешенные в прямоугольной рамке с помощью четырех торсионов 10 и образующие с ней чувствительный элемент (ЧЭ), связаны с основанием 6 в так называемой якорной точке 11 с помощью упругих элементов. Эти элементы играют роль ножки в обычном камертонном гироскопе (п. 2.14), позволяя ЧЭ поворачиваться вокруг оси oz на небольшие углы. В рабочем состоянии массы 4 приводятся в колебательное движение с резонансной частотой и линейной скоростью V электростатическими двигателями 2. С этой целью и двигатели и массы 4 имеют специальные гребешки 5, образующие в собранном состоянии воздушные конденсаторы. При подаче переменного напряжения на обкладки этих конденсаторов возникают силы F (рис.3.20), обусловленные взаимодействием электрических полей, порождающие названное движение.Всего используется три двигателя, два из которых расположены слева и справа датчика, а один в его центре. При отсутствии вращения прибора колебания инерционных масс происходят во взаимно противоположных направлениях в плоскости, параллельной его основанию. Уравнения, определяющие эти колебания, учитывая кинематическую схему прибора, представленную на рис. 3.20, могут быть записаны в виде: 
 (3.41)
(3.41) (3.42)
(3.42) , (3.43)
, (3.43)