|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ЛЧМ-импульсный аналоговый фильтр
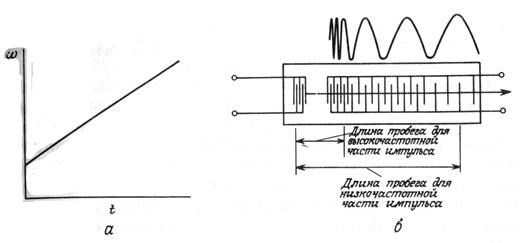
ЛЧМ – сигнал – это сигнал с линейной частотной модуляцией; амплитуда его постоянна, а мгновенная частота линейно изменяется во времени от времени.
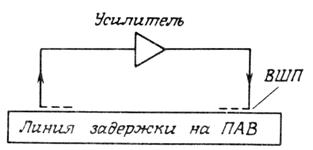
В показанный на рисунке момент времени распространяющийся вправо ЛЧМ-импульс точно совпадает с решеткой преобразователя. При этом на выходных клеммах преобразователя формируется мощный выходной импульс. Это дисперсионный фильтр, в котором низкочастотная часть сигнала задерживается на большее время, чем высокочастотная, в результате чего «хвост» длинного входного импульса догоняет его начало, — таким образом, происходит сжатие импульса. Такой метод сжатия импульсов имеет огромное значение для различных систем. Наверное, наиболее известным примером являются радиолокационные системы, использующие сжатие импульса, в которых радиолокационной станцией излучается ЛЧМ-импульс; после отражения от цели он проходит через фильтр сжатия импульса, сжимающий его в короткий импульс. Таким образом, для дальней радиолокации можно использовать длинный импульс, имеющий большую энергию, и сжимать его в приемнике в короткий мощный импульс для повышения разрешающей способности по времени расстоянию. В скрытных радиолокационных системах и секретных системах связи внутриимпульсная линейная частотная модуляция представляет собой один из методов кодирования сигнала. Наблюдателю необходимо для приема информации знать код (т. е. скорость модуляции) и иметь фильтр сжатия ЛЧМ-сигнала, настроенных на такую же скорость. ЛЧМ – фильтры используются в скрытых системах радиолокации, секретных системах связи. ЛЧМ-сигнал может быть даже ниже уровня теплового или фонового шума, но при приеме компрессионным приемником, содержащим ЛЧМ фильтр, согласованный со скоростью модуляции, сигнал будет выделяться на фоне этих шумов из-за увеличения отношения сигнал/шум, обусловленного сжатием импульса. Стабилизированные ПАВ генераторы ПАВ генератор представляет собой усилитель, в цепи обратной связи которого, включена линия задержки.
ПАВ генераторы могут работать в СВЧ диапазоне (от 100 МГц до 4 ГГц). Частота генерации и ее стабильность определяются свойствами кристалла, на котором построена линия задержки на ПАВ. Генератор на ПАВ проще и дешевле в изготовлении, чем альтернативные вариант получения высокостабильных сигналов в этом частотном диапазоне (например, многократное умножение сигнала сравнительно низкочастотного генератора с кварцевой стабилизацией частоты). Частота ПАВ генератора равна частоте ВШП ЛЗ. Сдвиг фазы, который обеспечивается ЛЗ ПАВ должен быть равен 2pN. (N – количество длин волн уложенных в ЛЗ – целое число). Чем больше N тем выше стабильность частоты генерации.
(Конструктивно ПАВ генераторы выполнены на одном кристалле вместе с ЛЗ ПАВ и усилителем)
Пьезоэлектрические двигатели (ПЭД) По принципу действия ПЭД можно подразделить на две основные группы: - ударного действия с дискретным перемещением подвижной части; - ПЭД волнового типа с непрерывным перемещением подвижной части.
В ПЭД ударного типа осуществляется ударное взаимодействие «статора» и «ротора» в зоне их сосредоточенного контакта, и подвижная часть приводится в движение под действием ударных импульсов, следующих с частотой колебаний ПЭ. Частота колебаний может доходить до МГц; следовательно, эти ПЭД при больших значениях fр характеризуются высокой равномерностью движения, хотя в каждый период колебаний Т существует неравномерность. Эта группа ПЭД в определенном смысле аналогична электрическим двигателям постоянного тока, так как якорь последних получает высокочастотные периодические толчки от взаимодействия магнитных полей.
В ПЭД волнового типа с «распределенным» контактом осуществляется «непрерывное» фрикционное взаимодействие волнового движения упругого преобразователя (ПЭ) и подвижной части. (Бегущая волна). Эта группа ПЭД имеет некоторую аналогию с волновыми фрикционными передачами, а так же с электрическими двигателями переменного тока, у которых в этом случае происходит постоянное взаимодействие электромагнитных полей статора и ротора. При работе ПЭД происходит «проскальзывание» подвижной части и ПЭ относительно друг друга, что приводит к их изнашиванию, снижению КПД, и точности отработки перемещений, нестабильности характеристик и параметров ПЭД при действии дестабилизирующих факторов (среды, нагрузки). В диапазоне мощностей (1-10 Вт) ПЭД имеет ряд преимуществ: - более высокие динамические свойства; - высокую разрешающую способность по перемещению; - в 1.5-2 лучшие массогабаритные показатели; - повышенную технологичность изготовления (на 20-30%); - отсутствие влияния на работу ПЭД электромагнитных полей. Момент развиваемый низкоскоростными ПЭД достигает 10 Н*М. КПД ПЭД может достигать 85%. Частота вращения достигает 105 мин-1. Мощность ПЭД лежит в пределах 3-50 Вт. ПЭД ударного типа имеют большие момент вращения и КПД, чем ПЭД волнового типа. Двигатели обоих типов могут быть как реверсивными так и не реверсивными.
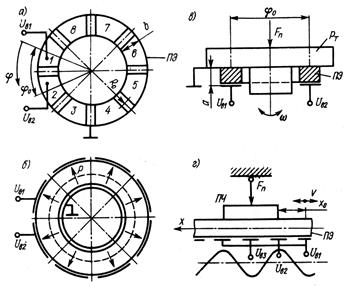
На рисунке представлена конструкция пьезоэлектрического двухкоординатного привода для перемещения предметного столика оптического микроскопа. 1- предметная плита; 2- шариковые опоры; 3- основание; 4, 5 – пьезокерамические кольца, оси которых находятся под углом 900; кольца 4 и 5 контактируют с плитой 1 посредством башмаков 6. Кольца работают поочередно: интервал времени перемещения по одной оси соответствует интервалу холостого хода по другой координате. Амплитуда импульсов питания привода определяет величину шага перемещения столика, частота следования импульсов определяет скорость перемещения столика.
Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 964; Нарушение авторского права страницы