
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Причины возникновения переходных процессовСтр 1 из 10Следующая ⇒
Причины возникновения переходных процессов При всех изменениях в электрической цепи: включении, выключении, коротком замыкании, колебаниях величины какого-либо параметра и т.п. – в ней возникают переходные процессы, которые не могут протекать мгновенно, так как невозможно мгновенное изменение энергии, запасенной в электромагнитном поле цепи. Таким образом, переходный процесс обусловлен несоответствием величины запасенной энергии в магнитном поле катушки и электрическом поле конденсатора ее значению для нового состояния цепи. При переходных процессах могут возникать большие перенапряжения, сверхтоки, электромагнитные колебания, которые могут нарушить работу устройства вплоть до выхода его из строя. С другой стороны, переходные процессы находят полезное практическое применение, например, в различного рода электронных генераторах. Все это обусловливает необходимость изучения методов анализа нестационарных режимов работы цепи. Основные методы анализа переходных процессов в линейных цепях: 1. Классический метод, заключающийся в непосредственном интегрировании дифференциальных уравнений, описывающих электромагнитное состояние цепи. 2. Операторный метод, заключающийся в решении системы алгебраических уравнений относительно изображений искомых переменных с последующим переходом от найденных изображений к оригиналам. 3. Частотный метод, основанный на преобразовании Фурье и находящий широкое применение при решении задач синтеза. 4. Метод расчета с помощью интеграла Дюамеля, используемый при сложной форме кривой возмущающего воздействия. 5. Метод переменных состояния, представляющий собой упорядоченный способ определения электромагнитного состояния цепи на основе решения системы дифференциальных уравнений первого прядка, записанных в нормальной форме (форме Коши). Законы коммутации Доказать законы коммутации можно от противного: если допустить обратное, то получаются бесконечно большие значения На практике, за исключением особых случаев (некорректные коммутации), допустимо использование указанных законов в другой формулировке, а именно: первый закон коммутации – в ветви с катушкой индуктивности ток в момент коммутации сохраняет свое докоммутационное значение и в дальнейшем начинает изменяться с него: второй закон коммутации – напряжение на конденсаторе в момент коммутации сохраняет свое докоммутационное значение и в дальнейшем начинает изменяться с него: Необходимо подчеркнуть, что более общей формулировкой законов коммутации является положение о невозможности скачкообразного изменения в момент коммутации для схем с катушкой индуктивности – потокосцеплений, а для схем с конденсаторами – зарядов на них. В качестве иллюстрации сказанному могут служить схемы на рис. 2, переходные процессы в которых относятся к так называемым некорректным коммутациям (название произошло от пренебрежения в подобных схемах малыми параметрами, корректный учет которых может привести к существенному усложнению задачи). Действительно, при переводе в схеме на рис. 2, а ключа из положения 1 в положение 2 трактование второго закона коммутации как невозможность скачкообразного изменения напряжения на
конденсаторе приводит к невыполнению второго закона Кирхгофа
3. Уравнение переходных процессов в линейных цепях. Принужденные и свободные составляющие. Общий случай решения. Начальные условия. Начальные условия В соответствии с определением свободной составляющей Зависимыми начальными условиями называются значения остальных токов и напряжений, а также производных от искомой функции в момент коммутации, определяемые по независимым начальным условиям при помощи уравнений, составляемых по законам Кирхгофа для
Частное решение xпр уравнения определяется видом функции f(x), стоящей в его правой части, и поэтому называется принужденной составляющей. Для цепей с заданными постоянными или периодическими напряжениями (токами) источников принужденная составляющая определяется путем расчета стационарного режима работы схемы после коммутации любым из рассмотренных ранее методов расчета линейных электрических цепей.
Вторая составляющая xсв общего решения х уравнения – решение с нулевой правой частью – соответствует режиму, когда внешние (принуждающие) силы (источники энергии) на цепь непосредственно не воздействуют. Влияние источников проявляется здесь через энергию, запасенную в полях катушек индуктивности и конденсаторов. Данный режим работы схемы называется свободным, а переменная xcв - свободной составляющей.
В соответствии с вышесказанным, . общее решение имеет вид x=xcв+xпр Разрядка конденсатора. При разряде конденсатора на резистор Тогда, принимая, что к моменту коммутации конденсатор был заряжен до напряжения
Соответственно разрядный ток
Как видно из (8), во избежание значительных бросков разрядного тока величина В заключение отметим, что процессы заряда и разряда конденсатора используются в генераторах пилообразного напряжения, широко применяемых в автоматике. Для этого ключ в схеме на рис. 6 заменяется на электронный.
18. Переходные процессы в цепи из последовательно соединенных активного сопротивления, индуктивности и емкости. Тогда
На рис. 5 представлены качественные кривые При подключении R-L-C-цепи к источнику синусоидального напряжения для нахождения принужденных составляющих тока в цепи и напряжения на конденсаторе следует воспользоваться символическим методом расчета, в соответствии с которым
и
где Таким образом,
Здесь также возможны три режима:
1.
Наибольший интерес представляет третий режим, связанный с появлением во время переходного процесса собственных колебаний с частотой
Тогда
На рис. 5 представлены качественные кривые
Последовательность расчета Определение функции Запись выражения Определение производной Подстановка найденных функций в (1) и интегрирование определенного интеграла.
Исходные данные для расчета:
Переходная проводимость
Операторным методом 1. Определение независимых начальных условий путем расчета докоммутационного режима работы цепи. 2. Составление операторной схемы замещения цепи (для простых цепей с нулевыми начальными условиями этот этап может быть опущен). 3. Запись уравнений по законам Кирхгофа или другим методам расчета линейных цепей в операторной форме с учетом начальных условий. 4. Решение полученных уравнений относительно изображений искомых величин. 5.
Метод переменных состояний Уравнения элекромагнитного состояния – это система уравнений, определяющих режим работы (состояние) электрической цепи. Метод переменных состояния основывается на упорядоченном составлении и решении системы дифференциальных уравнений первого порядка, которые разрешены относительно производных, т.е. записаны в виде, наиболее удобном для применения численных методов интегрирования, реализуемых средствами вычислительной техники. Количество переменных состояния, а следовательно, число уравнений состояния равно числу независимых накопителей энергии. К уравнениям состояния выдвигаются два основных требования: - независимость уравнений; - возможность восстановления на основе переменных состояния (переменных, относительно которых записаны уравнения состояния) любых других переменных. Первое требование удовлетворяется специальной методикой составления уравнений состояния, которая будет рассмотрена далее. Для выполнения второго требования в качестве переменных состояния следует принять потокосцепления (токи в ветвях с индуктивными элементами) и заряды (напряжения) на конденсаторах. Действительно, зная закон изменения этих переменных во времени их всегда можно заменить источниками ЭДС и тока с известными параметрами. Остальная цепь оказывается резистивной, а следовательно, всегда рассчитывается при известных параметрах источников. Кроме того, начальные значения этих переменных относятся к независимым, т.е. в общем случае рассчитываются проще других. При расчете методом переменных состояния, кроме самих уравнений состояния, связывающих первые производные Таким образом, полная система уравнений в матричной форме записи имеет вид
Здесь Начальные условия для уравнения (2) задаются вектором начальных значений В качестве примера составления уравнений состояния рассмотрим цепь на рис. 4, а, в которой требуется определить токи
По законам Кирхгофа для данной цепи запишем
Поскольку
или в матричной форме записи
А В Матричное уравнение вида (3) вытекает из соотношений (4) и (6):
С D
Вектор начальных значений Непосредственное использование законов Кирхгофа при составлении уравнений состояния для сложных цепей может оказаться затруднительным. В этой связи используют специальную методику упорядоченного составления уравнений состояния
Первичные параметры Под первичными параметрами линии будем понимать сопротивление
Линия без искажения Пусть сигнал, который требуется передать без искажений по линии, является периодическим, т.е. его можно разложить в ряд Фурье. Сигнал будет искажаться, если для составляющих его гармонических затухание и фазовая скорость различны, т.е. если последние являются функциями частоты. Таким образом, для отсутствия искажений, что очень важно, например, в линиях передачи информации, необходимо, чтобы все гармоники распространялись с одинаковой скоростью и одинаковым затуханием, поскольку только в этом случае, сложившись, они образуют в конце линии сигнал, подобный входному. Идеальным в этом случае является так называемая линия без потерь, у которой сопротивление Действительно, в этом случае
т.е. независимо от частоты коэффициент затухания
Однако искажения могут отсутствовать и в линии с потерями. Условие передачи сигналов без искажения вытекает из совместного рассмотрения выражений для постоянной распространения
и фазовой скорости
Из (1) и (2) вытекает, что для получения
Как показывает анализ (3), при
Линия, параметры которой удовлетворяют условию (4), называется линией без искажений. Фазовая скорость для такой линии
и затухание . Следует отметить, что у реальных линий (и воздушных, и кабельных)
Причины возникновения переходных процессов в цепях с распределенными параметрами. Исходные уравнения и их решения. Фронт волны. Падающая, отраженная и преломленная волны. Правило удвоения волны Пусть волна произвольной формы движется по линии с волновым сопротивлением
Для момента прихода волны к нагрузке можно записать
Нелинейные элементы и их характеристики. Примеры практического применения нелинейных элементов Нелинейными называются цепи, в состав которых входит хотя бы один нелинейный элемент. Нелинейными называются элементы, параметры которых зависят от величины и (или) направления связанных с этими элементами переменных (напряжения, тока, магнитного потока, заряда, температуры, светового потока и др.). Нелинейные элементы описываются нелинейными характеристиками, которые не имеют строгого аналитического выражения, определяются экспериментально и задаются таблично или графиками. Нелинейные элементы можно разделить на двух – и многополюсные. Последние содержат три (различные полупроводниковые и электронные триоды) и более (магнитные усилители, многообмоточные трансформаторы, тетроды, пентоды и др.) полюсов, с помощью которых они подсоединяются к электрической цепи. Характерной особенностью многополюсных элементов является то, что в общем случае их свойства определяются семейством характеристик, представляющих зависимости выходных характеристик от входных переменных и наоборот: входные характеристики строят для ряда фиксированных значений одного из выходных параметров, выходные – для ряда фиксированных значений одного из входных. По другому признаку классификации нелинейные элементы можно разделить на инерционные и безынерционные. Инерционныминазываются элементы, характеристики которых зависят от скорости изменения переменных. Для таких элементов статические характеристики, определяющие зависимость между действующими значениями переменных, отличаются от динамических характеристик, устанавливающих взаимосвязь между мгновенными значениями переменных. Безынерционныминазываются элементы, характеристики которых не зависят от скорости изменения переменных. Для таких элементов статические и динамические характеристики совпадают. Понятия инерционных и безынерционных элементов относительны: элемент может рассматриваться как безынерционный в допустимом (ограниченном сверху) диапазоне частот, при выходе за пределы которого он переходит в разряд инерционных. В зависимости от вида характеристик различают нелинейные элементы с симметричными и несимметричными характеристиками. Симметричной называется характеристика, не зависящая от направления определяющих ее величин, т.е. имеющая симметрию относительно начала системы координат: По типу характеристики можно также разделить все нелинейные элементы на элементы с однозначной и неоднозначной характеристиками. Однозначной называется характеристика Наконец, все нелинейные элементы можно разделить на управляемые и неуправляемые. В отличие от неуправляемых управляемые нелинейные элементы (обычно трех- и многополюсники) содержат управляющие каналы, изменяя напряжение, ток, световой поток и др. в которых, изменяют их основные характеристики: вольт-амперную, вебер-амперную или кулон-вольтную.
Графические методы расчета При использовании этих методов задача решается путем графических построений на плоскости. При этом характеристики всех ветвей цепи следует записать в функции одного общего аргумента. Благодаря этому система уравнений сводится к одному нелинейному уравнению с одним неизвестным. Формально при расчете различают цепи с последовательным, параллельным и смешанным соединениями.
а) Цепи с последовательным соединением резистивных элементов. При последовательном соединении нелинейных резисторов в качестве общего аргумента принимается ток, протекающий через последовательно соединенные элементы. Расчет проводится в следующей последовательности. По заданным ВАХ Применение указанной методики иллюстрируют графические построения на рис. 2, б, соответствующие цепи на рис. 2, а.
Использование данного метода наиболее рационально при последовательном соединении линейного и нелинейного резисторов. В этом случае линейный резистор принимается за внутреннее сопротивление источника, и линейная ВАХ последнего строится по двум точкам.
б) Цепи с параллельным соединением резистивных элементов. При параллельном соединении нелинейных резисторов в качестве общего аргумента принимается напряжение, приложенное к параллельно соединенным элементам. Расчет проводится в следующей последовательности. По заданным ВАХ Использование данной методики иллюстрируют графические построения на рис. 4, б, соответствующие цепи на рис. 4, а.
в) Цепи с последовательно-параллельным (смешанным) соединением резистивных элементов. Расчет таких цепей производится в следующей последовательности: 1. Исходная схема сводится к цепи с последовательным соединением резисторов, для чего строится результирующая ВАХ параллельно соединенных элементов, как это показано в пункте б). 2. Проводится расчет полученной схемы с последовательным соединением резистивных элементов (см. пункт а)), на основании которого затем определяются токи в исходных параллельных ветвях. Графические методы расчета При использовании этих методов задача решается путем графических построений на плоскости. При этом характеристики всех ветвей цепи следует записать в функции одного общего аргумента. Благодаря этому система уравнений сводится к одному нелинейному уравнению с одним неизвестным. Формально при расчете различают цепи с последовательным, параллельным и смешанным соединениями.
а) Цепи с последовательным соединением резистивных элементов. При последовательном соединении нелинейных резисторов в качестве общего аргумента принимается ток, протекающий через последовательно соединенные элементы. Расчет проводится в следующей последовательности. По заданным ВАХ Применение указанной методики иллюстрируют графические построения на рис. 2, б, соответствующие цепи на рис. 2, а.
Использование данного метода наиболее рационально при последовательном соединении линейного и нелинейного резисторов. В этом случае линейный резистор принимается за внутреннее сопротивление источника, и линейная ВАХ последнего строится по двум точкам.
б) Цепи с параллельным соединением резистивных элементов. При параллельном соединении нелинейных резисторов в качестве общего аргумента принимается напряжение, приложенное к параллельно соединенным элементам. Расчет проводится в следующей последовательности. По заданным ВАХ Использование данной методики иллюстрируют графические построения на рис. 4, б, соответствующие цепи на рис. 4, а.
в) Цепи с последовательно-параллельным (смешанным) соединением резистивных элементов. Расчет таких цепей производится в следующей последовательности: 3. Исходная схема сводится к цепи с последовательным соединением резисторов, для чего строится результирующая ВАХ параллельно соединенных элементов, как это показано в пункте б). 4. Проводится расчет полученной схемы с последовательным соединением резистивных элементов (см. пункт а)), на основании которого затем определяются токи в исходных параллельных ветвях.
Магнитная проводимость Скалярная величина, равная отношению магнитного потока в рассматриваемом участке магнитной цепи к разности скалярных магнитных потенциалов на этом участке
Регулярные методы расчета Данными методами решаются задачи первого типа -”прямые” задачи. При этом в качестве исходных данных для расчета заданы конфигурация и основные геометрические размеры магнитной цепи, кривая (кривые) намагничивания ферромагнитного материала и магнитный поток или магнитная индукция в каком-либо сечении магнитопровода. Требуется найти НС, токи обмоток или, при известных значениях последних, число витков. 2. “Прямая” задача для разветвленной магнитной цепи |
Последнее изменение этой страницы: 2017-03-15; Просмотров: 1288; Нарушение авторского права страницы
 и
и  , что приводит к нарушению законов Кирхгофа.
, что приводит к нарушению законов Кирхгофа. .
. .
.
 . Аналогично при размыкании ключа в схеме на рис. 2, б трактование первого закона коммутации как невозможность скачкообразного изменения тока через катушку индуктивности приводит к невыполнению первого закона Кирхгофа
. Аналогично при размыкании ключа в схеме на рис. 2, б трактование первого закона коммутации как невозможность скачкообразного изменения тока через катушку индуктивности приводит к невыполнению первого закона Кирхгофа  . Для данных схем, исходя из сохранения заряда и соответственно потокосцепления, можно записать:
. Для данных схем, исходя из сохранения заряда и соответственно потокосцепления, можно записать: 
 в ее выражении имеют место постоянные интегрирования
в ее выражении имеют место постоянные интегрирования  , число которых равно порядку дифференциального уравнения. Постоянные интегрирования находятся из начальных условий, которые принято делить на независимые и зависимые. К независимым начальным условиям относятся потокосцепление (ток) для катушки индуктивности и заряд (напряжение) на конденсаторе в момент времени
, число которых равно порядку дифференциального уравнения. Постоянные интегрирования находятся из начальных условий, которые принято делить на независимые и зависимые. К независимым начальным условиям относятся потокосцепление (ток) для катушки индуктивности и заряд (напряжение) на конденсаторе в момент времени  (момент коммутации). Независимые начальные условия определяются на основании законов коммутации.
(момент коммутации). Независимые начальные условия определяются на основании законов коммутации. . Необходимое число начальных условий равно числу постоянных интегрирования. Поскольку уравнение вида (2) рационально записывать для переменной, начальное значение которой относится к независимым начальным условиям, задача нахождения начальных условий обычно сводится к нахождению значений этой переменной и ее производных до (n-1) порядка включительно при
. Необходимое число начальных условий равно числу постоянных интегрирования. Поскольку уравнение вида (2) рационально записывать для переменной, начальное значение которой относится к независимым начальным условиям, задача нахождения начальных условий обычно сводится к нахождению значений этой переменной и ее производных до (n-1) порядка включительно при  (ключ на рис.6 переводится в положение 2)
(ключ на рис.6 переводится в положение 2)  . Постоянная времени
. Постоянная времени  .
. (в частном случае
(в частном случае  ), для напряжения на нем в переходном режиме можно записать
), для напряжения на нем в переходном режиме можно записать .
. . (8)
. (8)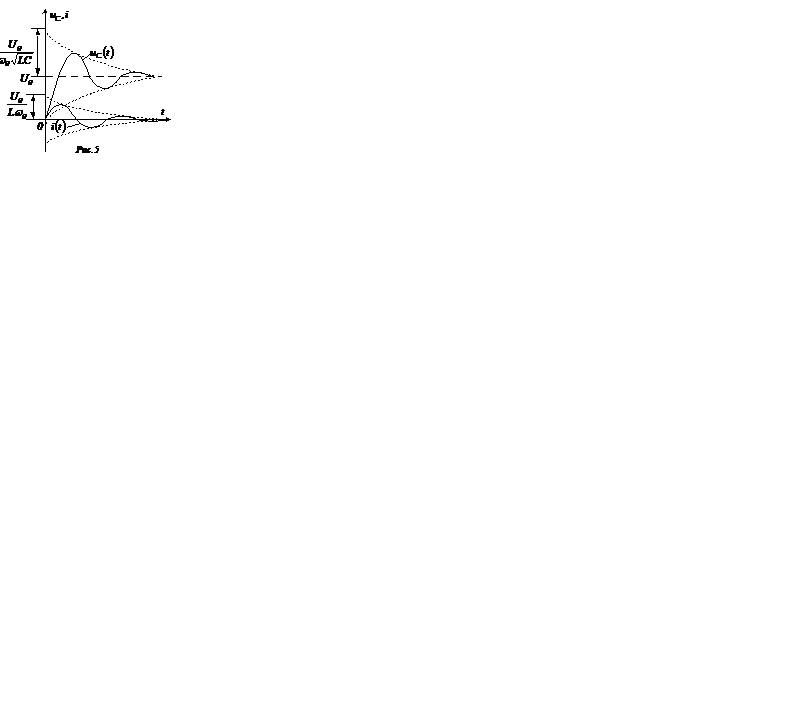

 .
. и
и  , соответствующие колебательному переходному процессу при
, соответствующие колебательному переходному процессу при  .
. 
 ,
,  ;
;  ;
;  .
. и
и  .
. ; 2.
; 2.  4.
4. 
 .
.  .
.  .
. . При этом возможны, в зависимости от соотношения частот собственных колебаний и напряжения источника, три характерные варианта: 1 -
. При этом возможны, в зависимости от соотношения частот собственных колебаний и напряжения источника, три характерные варианта: 1 -  ; 2 -
; 2 -  ; 3 -
; 3 -  , - которые представлены на рис. 6, а…6, в соответственно.
, - которые представлены на рис. 6, а…6, в соответственно. 
 (или
(или  ) для исследуемой цепи.
) для исследуемой цепи. (или
(или  ) путем формальной замены t на
) путем формальной замены t на  .
. .
. В качестве примера использования интеграла Дюамеля определим ток в цепи рис. 3, рассчитанный в предыдущей лекции с использованием формулы включения.
В качестве примера использования интеграла Дюамеля определим ток в цепи рис. 3, рассчитанный в предыдущей лекции с использованием формулы включения. ,
,  ,
,  .
. .
. .
. .
.

 Определение оригиналов (с помощью формулы разложения или таблиц соответствия оригиналов и изображений) по найденным изображениям.
Определение оригиналов (с помощью формулы разложения или таблиц соответствия оригиналов и изображений) по найденным изображениям. и
и  с самими переменными
с самими переменными  и
и  и источниками внешних воздействий – ЭДС и тока, необходимо составить систему алгебраических уравнений, связывающих искомые величины с переменными состояния и источниками внешних воздействий.
и источниками внешних воздействий – ЭДС и тока, необходимо составить систему алгебраических уравнений, связывающих искомые величины с переменными состояния и источниками внешних воздействий. ; (2)
; (2) . (3)
. (3) и
и  - столбцовые матрицы соответственно переменных состояния и их первых производных по времени;
- столбцовые матрицы соответственно переменных состояния и их первых производных по времени;  - матрица-столбец источников внешних воздействий;
- матрица-столбец источников внешних воздействий;  - столбцовая матрица выходных (искомых) величин;
- столбцовая матрица выходных (искомых) величин;  - квадратная размерностью n´ n (где n – число переменных состояния) матрица параметров, называемая матрицей Якоби;
- квадратная размерностью n´ n (где n – число переменных состояния) матрица параметров, называемая матрицей Якоби;  - прямоугольная матрица связи между источниками и переменными состояния (количество строк равно n, а столбцов – числу источников m);
- прямоугольная матрица связи между источниками и переменными состояния (количество строк равно n, а столбцов – числу источников m);  - прямоугольная матрица связи переменных состояния с искомыми величинами (количество строк равно числу искомых величин к, а столбцов – n);
- прямоугольная матрица связи переменных состояния с искомыми величинами (количество строк равно числу искомых величин к, а столбцов – n);  - прямоугольная размерностью к´ m матрица связи входа с выходом.
- прямоугольная размерностью к´ m матрица связи входа с выходом. (0).
(0). и
и  .
.
 ; (4)
; (4) ; (5)
; (5) . (6)
. (6) с учетом соотношения (6) перепишем уравнения (4) и (5) в виде
с учетом соотношения (6) перепишем уравнения (4) и (5) в виде
 .
. .
. .
. , индуктивность
, индуктивность  , проводимость
, проводимость  и емкость
и емкость  , отнесенные к единице ее длины.
, отнесенные к единице ее длины. равны нулю.
равны нулю. ,
,  и фазовая скорость
и фазовая скорость .
. (1)
(1) . (2)
. (2) и
и  , что обеспечивает отсутствие искажений, необходимо, чтобы
, что обеспечивает отсутствие искажений, необходимо, чтобы  , т.е. чтобы волновое сопротивление не зависело от частоты.
, т.е. чтобы волновое сопротивление не зависело от частоты. . (3)
. (3) (4)
(4) есть вещественная часть.
есть вещественная часть.
 . Поэтому для придания реальным линиям свойств линий без искажения искусственно увеличивают их индуктивность путем включения через одинаковые интервалы специальных катушек индуктивности, а в случае кабельных линий – также за счет обвивания их жил ферромагнитной лентой.
. Поэтому для придания реальным линиям свойств линий без искажения искусственно увеличивают их индуктивность путем включения через одинаковые интервалы специальных катушек индуктивности, а в случае кабельных линий – также за счет обвивания их жил ферромагнитной лентой. и падает на некоторую нагрузку
и падает на некоторую нагрузку  (см. рис. 6, а).
(см. рис. 6, а).
 ; (
; ( . Для несимметричной характеристики это условие не выполняется, т.е.
. Для несимметричной характеристики это условие не выполняется, т.е.  . Наличие у нелинейного элемента симметричной характеристики позволяет в целом ряде случаев упростить анализ схемы, осуществляя его в пределах одного квадранта.
. Наличие у нелинейного элемента симметричной характеристики позволяет в целом ряде случаев упростить анализ схемы, осуществляя его в пределах одного квадранта. , у которой каждому значению х соответствует единственное значение y и наоборот. В случае неоднозначной характеристики каким-то значениям х может соответствовать два или более значения y или наоборот. У нелинейных резисторов неоднозначность характеристики обычно связана с наличием падающего участка, для которого
, у которой каждому значению х соответствует единственное значение y и наоборот. В случае неоднозначной характеристики каким-то значениям х может соответствовать два или более значения y или наоборот. У нелинейных резисторов неоднозначность характеристики обычно связана с наличием падающего участка, для которого  , а у нелинейных индуктивных и емкостных элементов – с гистерезисом.
, а у нелинейных индуктивных и емкостных элементов – с гистерезисом. отдельных резисторов в системе декартовых координат
отдельных резисторов в системе декартовых координат  строится результирующая зависимость
строится результирующая зависимость  . Затем на оси напряжений откладывается точка, соответствующая в выбранном масштабе заданной величине напряжения на входе цепи, из которой восстанавливается перпендикуляр до пересечения с зависимостью
. Затем на оси напряжений откладывается точка, соответствующая в выбранном масштабе заданной величине напряжения на входе цепи, из которой восстанавливается перпендикуляр до пересечения с зависимостью  . Из точки пересечения перпендикуляра с кривой
. Из точки пересечения перпендикуляра с кривой  на отдельных резистивных элементах.
на отдельных резистивных элементах.
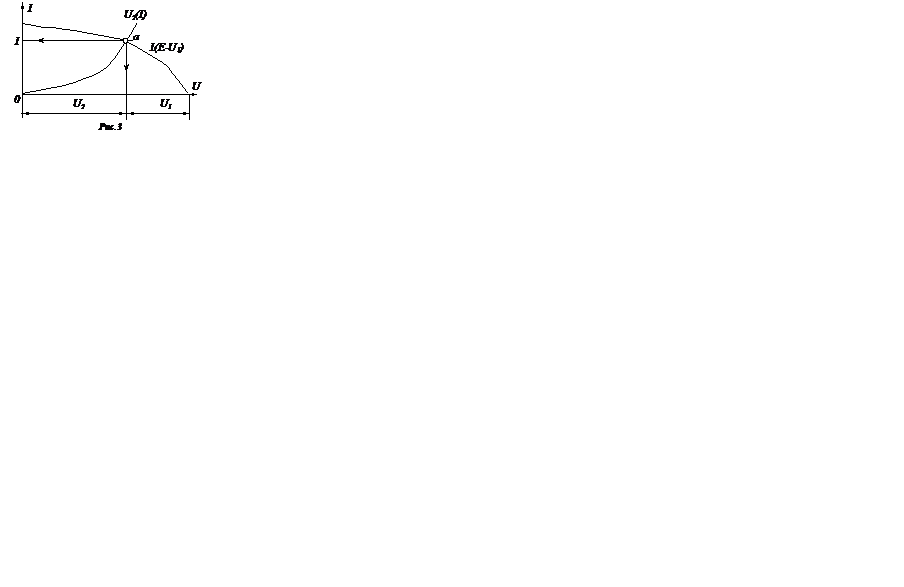 Графическое решение для последовательной нелинейной цепи с двумя резистивными элементами может быть проведено и другим методом – методом пересечений. В этом случае один из нелинейных резисторов, например, с ВАХ
Графическое решение для последовательной нелинейной цепи с двумя резистивными элементами может быть проведено и другим методом – методом пересечений. В этом случае один из нелинейных резисторов, например, с ВАХ  на рис.2, а, считается внутренним сопротивлением источника с ЭДС Е, а другой – нагрузкой. Тогда на основании соотношения
на рис.2, а, считается внутренним сопротивлением источника с ЭДС Е, а другой – нагрузкой. Тогда на основании соотношения  точка а (см. рис. 3) пересечения кривых
точка а (см. рис. 3) пересечения кривых  и
и  определяет режим работы цепи. Кривая
определяет режим работы цепи. Кривая  отдельных резисторов в системе декартовых координат
отдельных резисторов в системе декартовых координат  . Затем на оси токов откладывается точка, соответствующая в выбранном масштабе заданной величине тока источника на входе цепи (при наличии на входе цепи источника напряжения задача решается сразу путем восстановления перпендикуляра из точки, соответствующей заданному напряжению источника, до пересечения с ВАХ
. Затем на оси токов откладывается точка, соответствующая в выбранном масштабе заданной величине тока источника на входе цепи (при наличии на входе цепи источника напряжения задача решается сразу путем восстановления перпендикуляра из точки, соответствующей заданному напряжению источника, до пересечения с ВАХ  . Из точки пересечения перпендикуляра с кривой
. Из точки пересечения перпендикуляра с кривой  в ветвях с отдельными резистивными элементами.
в ветвях с отдельными резистивными элементами.