|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Графические изображения КИП и средств автоматизации.Стр 1 из 5Следующая ⇒
Бийск, 2006 1 Функциональные схемы систем автоматического управления. Графические изображения КИП и средств автоматизации.
Буквенные обозначения основных и контролируемых, регулируемых параметров. T – температура. Р – давление, F – расход, L – уровень, W – масса, Q – состав, М – влажность, D – плотность, S – скорость, частота, R – радиоактивность, V – вязкость, Е – любая электрическая величина. Буквы, применяемые для уточнения контролируемых и регулируемых параметров. F – соотношение, доля, дробь, Q – интегрирование по времени, D – разность, перепад, J – автоматическое переключение, обегание. Буквенные обозначения функциональных признаков измерительных приборов. I – показания, R- регистрация, C- регулирование, S – включение, выключение, переключение, А – сигнализация, 1.5 Некоторые часто встречающиеся буквенные обозначения.
Е – первичное преобразование. Т – промежуточное преобразование или дистанционная передача, y- общая функция преобразования, Н - ручное управление, N- пусковая аппаратура. 1.6 Основные правила использования буквенных обозначений.
а) для буквенных обозначений используются прописные буквы латинского алфавита, б) буквенные обозначения записываются внутри графического изображения прибора и только в его верхней части. Нижняя часть графического изображения используется для цифро-буквенного обозначения в спецификации. в) На первом месте всегда записывается буква, символизирующая контролируемый или регулируемый параметр, г) Если данный параметр необходимо уточнить, то уточняющая буква пишется следом за первой, и две эти буквы считаются за одну, д) буквы, начиная со второй символизируют функциональные признаки измерительного прибора, при чем порядок букв должен быть следующим I R C S A. е) все приборы и устройства, относящиеся к одной линии контроля или одному контуру регулирования, обозначаются одной и той же арабской цифрой. Для буквенных обозначений в спецификации используются строчные или малые буквы русского алфавита, при чем буква а ставится на том устройстве, где сигнал возникает и далее по ходу прохождения сигнала буквы изменяются согласно алфавиту. При дистанционном или централизованном контроле любой КИП состоит из трех основных частей: а) первичный преобразователь, б) промежуточный преобразователь или канал связи, в) вторичный прибор. Первичный преобразователь-это устройство которое преобразует измеряемый параметр в сигнал удобный для обработки. Промежуточный преобразователь- это устройство которое обеспечивает связь выходной величины первичного преобразователя со входом вторичного прибора. В ряде случаев в измерительной системе промежуточный преобразователь может отсутствовать. Наиболее предпочтительный вариант, когда промежуточный преобразователь не используется. Вторичный прибор- это устройство, которое отображает измеряемый параметр в удобном для пользователя вида.
Контроль важнейших технологических параметров. Измерение температуры.
Температура- это условная статическая величина, характеризующая среднюю кинетическую энергию атомов и молекул. Температурной шкалой, называют ряд отметок внутри температурного интервала, ограниченного двумя легко воспроизводимыми температурами. Для упорядочения температурных измерений была принята международная практическая температурная шкала М П Т Ш- 68. За единицу температуры в этой шкале был принят К, но допускается и применение 0С. Классификация приборов для измерения температур. 1. Термометры расширения: 2. Монометрические термометры: 3. Термоэлектрические термометры: 4. Термопреобразователи сопротивления: 5. Пирометры излучения.
Термометры расширения. Данные термометры по виду рабочего тела разделяются на 2 группы: 1. Жидкостные термометры: 2. Твердотельные термометры. Принцип действия жидкостных термометров основан на различии коэффициентов объемного теплового расширения жидкости и материала, из которого сделан сам термометр. Для твердотельных термометров принцип действия рассчитан на различии коэффициентов линейного теплового расширения рабочей пары. По типу рабочей пары данные термометры делятся на биметаллические и дилатометрические. У биметаллических- Ме+ Ме. У дилатометрических Ме+ Кер. 2.1.3 Манометрические термометры.
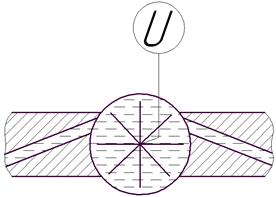
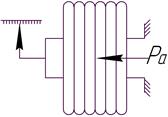
Принцип действия основан на преобразовании величины температуры в величину давления в замкнутом пространстве.
Рисунок 1
По виду рабочего тела Монометрические термометры подразделяются на: 1. Газовые: 2. Жидкостные: 3. Конденсационные. Градуировка манометрических термометров осуществляется в условиях завода изготовителя при температуре капилляра и манометрической части 200С. Для уменьшения температурной погрешности объем термометра должен составлять не менее 80% от объема всего пермометра.
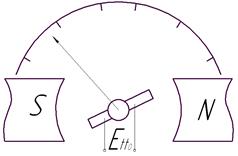
2.1.4 Термоэлектрические преобразователи ( термопары ).
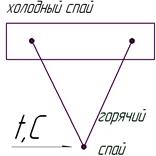
Термопара - это система состоящая из двух или нескольких разнородных проводников в которой возникает термо эдс (Еtt0). Наиболее часто для температурных измерений используются термо пары типов ТХК, ТХА, ППР. ТХК- термопара хромель- копелевая; ТХА- термопара хромель- алюмелевая; ППР- термопара платина- платино-родиевый. Градуировочной характеристикой термопары называется зависимость между измеряемой температурой в градусах и термо эдс температуры в мВ. Градуировочные характеристики представлены в виде таблиц для температуры холодного спая 00С.
Рисунок 2 2.2 Вторичные измерительные приборы для термоэлектрических преобразователей.
Милливольтметр Милливольтметр- прибор магнитоэлектрической системы конструктивно представляет собой подвижную рамку, расположенную между полюсами магнита. Особенности приборов магнитоэлектрической системы; 1. наличие постоянного магнита; 2. наличие одной или нескольких подвижных рамок; 3. наличие спиральных пружин, которые являются тоководами и которые создают при закручивании компенсирующий момент. При протекании тока по рамке ( при подключении Еtt0) возникает вращающий момент Мвр= Рамка поворачивается, спиральные пружины закручивается и создается компенсирующий момент. Мк= к2Е
Рисунок 3
Условия равновесия рамки:
B-магнитная индукция: I-сила тока:
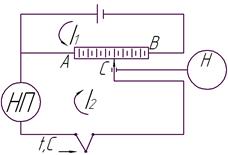
2.2.2 Ручной потенциометр: Принцип действия основан на уравновешивании ЭДС термопары напряжением внешнего источника. Основной принцип включения термопары в цепь потенциометра состоит в том, чтобы токи I1 от внешнего источника и ток I2 от термопары протекали по участку АС в одном направлении, тогда на основании 2-го закона Кирхгоффа для тока I1 можно записать:
Рисунок 4
Принцип действия уравновешивания или компенсации. Ток I2- протекающий через нулевой прибор будет равен нулю, когда Ett0 = Принято считать, что при I2=0 произошло уравновешивание термоЭДС термопары падением напряжения на участке АС. В этот момент нулевой прибор показывает нулевое значение, а численное значение изменения температуры наблюдается на отградуированной шкале потенциометра. Достоинства: простое устройство Недостаток: необходимость присутствия человека.
Автоматический потенциометр Основы теории мостовых схем Графически мостовая схема представляет собой повернутый квадрат, в каждой стороне которого находится по сопротивлению.
Рисунок 5
Сторона квадрата вместе с сопротивлением, называется плечом мостовой схемы. Диагональ АВ, называется питающей, диагональ СД называется измерительной. Мостовая схема называется уравновешенной или сбалансированной, если при подачи питающего напряжения на одну диагональ (АВ), напряжение на другой диагонали ( СД)=0 Аналитическое выражение для условия равновесия имеет вид: R1 Если условия равновесия не выполняется, то в измерительной диагонали СД появляется напряжение небаланса (UСД ). Принцип действия автоматического потенциометра основан на уравновешивании ЭДС термопары напряжением небаланса. Основой измерительной части автоматического потенциометра является мостовая схема. Термопара дифференциально включается в измерительную диагональ в результате чего на вход электронного усилителя подается разность
Рисунок 6
На усилителе эта величина усиливается до пределов способных управлять работой реверсивного двигателя. В зависимости от знака подаваемой на двигатель величины, вал двигателя вращается в ту или иную сторону, при этом через передаточный механизм перемещается стрелочный указатель и перо самописца и подвижный контакт С на сопротивлении реохорда. При перемещении подвижного контакта С изменяется напряжение небаланса UСД и наступает уравновешивание, т.е. Ett0=UСД. При этом реверсивный двигатель останавливается, стрелочный указатель показывает численное значение температуры, перо самописца рисует график ее изменения. На этом заканчивается один цикл работы прибора.
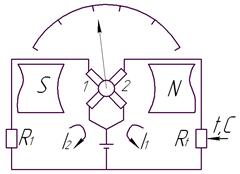
Логометр.
Это прибор магнитоэлектрической системы. Конструктивно представляет собой две жестко скрепленные рамки, размещенные вне равномерном зазоре, между полюсами наконечниками постоянного магнита.
Рисунок 7
Если R1=Rt, то I1=I2, Mвр1=Мвр2 Под воздействием температуры Rt меняет свое значение
Неуравновешенные мосты.
Рисунок 8
Особенностью данных приборов является, то что у них отсутствует уравновешивающие устройство и в измерительную диагональ включен милливольтметр для измерения напряжения небаланса. Условие равновесия мостовой схемы: Исходя из этой функциональной зависимости, шкала милливольтметра может быть отградуирована в единицах измерения температуры.
Автоматический мост.
Рисунок 10 Счетчики количества.
Рисунок 16
По принципу действия счетчики подразделяются на скоростные и объемные. Скоростные делятся на винтовые и крыльчатые. У винтовых счетчиков рабочим элементом является винт, который располагается параллельно потоку, а у крыльчатых - крыльчатка, которая располагается перпендикулярно потоку. У крыльчатых счетчиков подвод и отвод жидкости осуществляется тангенциально. Вращательное движение рабочих органов ч/з передаточный механизм передается на счетчик числа оборотов, шкала которого, в большинстве случаев, градуируется в единицах количества. Измерение давления. Под давлением понимают предел отношения нормальной составляющей силы на единицу поверхности. В технике различают абсолютное и избыточное давление. Ра- параметр состояния вещества. Ри =Ра - Рб. Рб – барометрическое давление.
Грузо-поршневые приборы.
Конструктивно эти приборы представляют собой сообщающих сосудов, в которой давление одинаково распространяется во всех направлениях. Данные приборы не используются непосредственно для контроля давления, а применяются для проверки рабочих приборов. 2.6.3 Деформационные приборы. Одновитковый пружинный манометр.
Рисунок 18
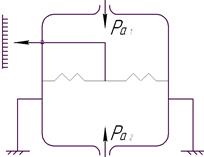
Один конец пружины жестко закреплен, а другой свободный конец через передаточный механизм передается на стрелочный механизм. В зависимости от измеряемого давления свободный конец пружины будет перемещаться либо к центру кривизны, либо от него Мембранные приборы.
Рисунок 19
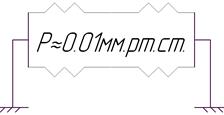
Чувствительным элементом данного прибора является мембрана (пластина, выполненная из упругих материалов). В большинстве случаев мембраны используются в составе мембранных коробок во внутреннюю полость которых подается избыточное давление. Если мембранная коробка герметично запаяна и имеет внутренние давление 0, 01 мм. рт. ст., то данная коробка называется анероидной коробкой и является элементом барометра. Замечание: Деформация упругого элемента передается на преобразователь, позволяющий получить на выходе электрический сигнал. Сильфонные приборы.
Рисунок 20
Сильфон под воздействием измеряемого давления измеряет свои линейные размеры. Плоское днище сильфона через передаточный механизм перемещает стрелочный указатель или же действует на электрический преобразователь. Измерение уровня. Уровнем называется высота столба жидкости в технологическом аппарате.
Электрические уровнемеры. Подразделяются на две основные группы: - емкостные; - омические.
Рисунок 24
Рассмотрим емкостной измеритель уровня: электрическая емкость чувствительного элемента определяется по формуле: Где S- площадь, - Система позволяет во всем диапазоне изменения уровня контролировать его величину; - Система позволяет осуществлять либо сигнализацию, либо регулирование по величине верхнего уровня.
Критерий устойчивости Это математические методы позволяющие определить устойчивость или работоспособность систем не находя корней уравнения.
Критерий Гурвица Основан на составлении матрицы, главная диагональ которой записывается из коэффициентов характеристического уравнения начинается с Заполнение матрицы производят диагонали вверх по возрасрастанию индексов коэффициентов и вниз по убыванию свободного места заполненного нулями.
Отчёркивая одинаковое число строк и столбцов выделяем дисп. определители Гурвица.
Для устойчивости систем управления необходимо и достаточно, чтобы коэффициент Критерий Михайлова Данный критерий используется если корни характеристического уравнения представлены в виде комплексной формулы. Данный метод основан на изображении годографа векторов комплексно-частотними функциями.
Рисунок 34
Для устойчивости системы управления необходимо и достаточно, чтобы годограф вектора комплексно-частотной функции начинался на положительной полуоси, обходил в положительном направлении n квадрантов и нигде не обращается в 0 при изменении
Позиционные регуляторы
Пз – регулятор – это устройство, в котором при достижении определённого значения входной величины выходная величина изменяется скачком и принимает конечное число фиксированных значений. В теоретическом плане ПЗ – регуляторы можно представить как идеальные и реальные. Рассмотрим график выходной величины для идеального Пз – регулятора
Рисунок 37
В зависимости от типа технологического процесса регуляторы данного типа могут классифицироваться как регуляторы типов «откр-закр» и «вкл-выкл». Аналитическое выражение выходной величины идеального Пз – регулятора имеет вид
Для идеального Пз – регулятора графики прямого и обратного хода совпадают. Рассмотрим график выходной величины реального Пз – регулятора
Рисунок 38
Величина Параметром настройки данного регулятора является входная величина, которая для однозначной работы данного регулятора должна находиться вне пределов зоны нечувствительности. Больше верхнего предела для условной единицы и ниже нижнего предела для условного нуля. Аналитическое выражение выходной величины имеет вид
Пропорциональный регулятор Это регулятор, у которого выходная величина y в пределах зоны регулирования пропорциональна изменению входной величины x. Уравнение динамики имеет вид
В основе пропорционального регулятора лежит усилительное динамическое звено. Переходная характеристика данного регулятора имеет вид.
Рисунок 40
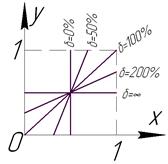
Параметром настройки данного регулятора является предел пропорциональности:
Пределом пропорциональности называется диапазон изменения входной величины выраженный в процентах от максимального, в пределах которого выходная величина изменяется от одного крайнего значения до другого. Предел пропорциональности может изменятся от единиц % до несколькох тысяч. Рассмотрим семейство статических характеристик для различных значений параметров настройки.
Рисунок 41
При увеличении параметра настройки воздействие входной величины на выходную ослабевает, и наоборот. Кривая разгона данного регулятора имеет вид.
Рисунок 42 ПД – регулятор
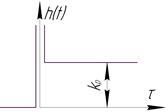
Дифференциальная составляющая данного регулятора в качестве отдельного регулятора не применяется, а используется для того, чтобы изменение выходной величины по времени опережало изменение входной. Переходная характеристика имеет вид:
Рисунок 45
Рисунок 46 ПИД – регулятор
Переходная характеристика
Рисунок 47
Кривая разгона:
Рисунок 48 Качество регулирования
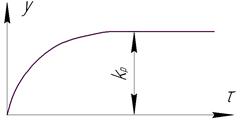
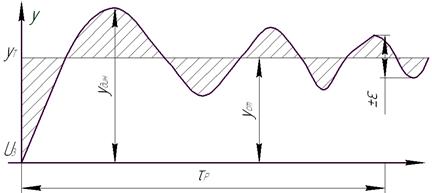
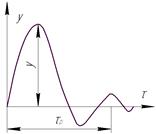
Виды ошибок 1 Статическая ошибка регулирования Она постоянна по времени и для различных регуляторов эта величина может быть также различна. 2 Динамическая ошибка регулирования 3 Перерегулирование 4 Время регулирования
Рисунок 49
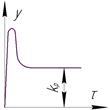
Временем регулирования называется время в течении которого достигается заданная точность. Если точность регулирования не задана, то временем регулирования считается время в течении которого выходная величина входит в 5% зону установившегося значения или выходная величина достигает 0, 95 установившегося значения. 5 Интегральная квадратичная ошибка регулирования
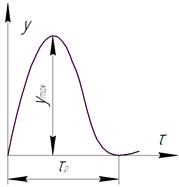
3.11.2 Типовые переходные процессы (виды переходных процессов) 1 Граничный апериодический процесс с минимальным временем регулирования Для него
Рисунок 50
2 Процесс с 20% регулированием
Рисунок 60
3. Процесс с минимальной квадратичной площадью отклонения
Рисунок 61
Выбор типа автоматического регулятора производится исходя из анализа соотношения
где
1) Если 2) Если 3) Когда
Емкостной преобразователь. Принцип действия основан на изменении величины электрической ёмкости (емкостного сопротивления) под влиянием внешних факторов (см. электрические уровнемеры.)
Индукционный
Конструктивно данный преобразователь представляет собой подвижную рамку, расположенную между полюсными наконечниками постоянного магнита.
Рисунок 67 Данный преобразователь используется в качестве тахогенераторов для определения частоты вращения рабочих органов. 4.2.3 Пьезометрический преобразователь . Принцип действия основан на пьезоэффекте, т.е. способности материалов накапливать заряды на сторонах пластин под воздействием механических усилий. Данные преобразователи обладают высокой чувствительностью и точностью, но при этом имеют малую механическую прочность.
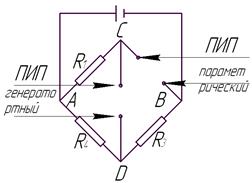
ИЗМЕРИТЕЛЬНЫЕ СХЕМЫ. Мостовая схема В мостовых измерительных схемах параметрический П.И.П. включается в плечо(плечи) мостовый схемы, а генераторные П.И.П. ы дифференциально включаются в измерительную диагональ.
Рисунок 69
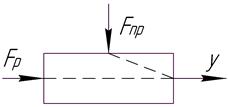
Использование мостовых схем позволяет получить выходные величины разных знаков для управления работой автоматических устройств. Одномерные объекты
Эти объекты имеют одну выходную величину и характеризуются одним уравнением статики и одним уравнением динамики. Fпр, Fр – входные величины L – выходная величина L=f(Fпр, Fр) – Ур-е статики L=f(Fпр, Fр, t) – Ур-е динамики Для одномерного объекта схема динамического канала имеет вид:
Рисунок 71
По данной схеме видно, что выходная величина определяется параметрами 2-х входных величин.
Многомерные объекты Данные объекты содержат 2, 3 и более выходных величин. Число уравнений должно соответствовать числу входных величин. Бийск, 2006 1 Функциональные схемы систем автоматического управления. Графические изображения КИП и средств автоматизации.
|
Последнее изменение этой страницы: 2017-03-14; Просмотров: 2525; Нарушение авторского права страницы

 первичный преобразователь или прибор установленный по месту.
первичный преобразователь или прибор установленный по месту. прибор установленный на щите или пульте.
прибор установленный на щите или пульте. Исполнительный механизм.
Исполнительный механизм. Регулирующий орган.
Регулирующий орган. Лампа сигнальная.
Лампа сигнальная. Звонок электрический.
Звонок электрический. Двигатель.
Двигатель.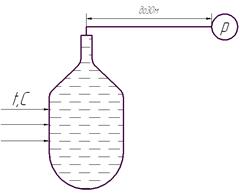

 коэффициент, характеризующий геометрические размеры рамки:
коэффициент, характеризующий геометрические размеры рамки: 
 коэффициент, характеризующий геометрические размеры пружины:
коэффициент, характеризующий геометрические размеры пружины:  угол отклонения рамки или стрелочного указателя.
угол отклонения рамки или стрелочного указателя.

 высокая надежность.
высокая надежность.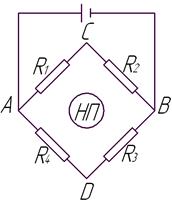

 (Ett0-UСД).
(Ett0-UСД).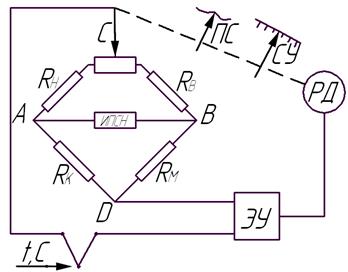
 Rt, I1
Rt, I1  , который поворачивает систему рамок, пружины закручиваются и создается момент компенсирующий, при условии
, который поворачивает систему рамок, пружины закручиваются и создается момент компенсирующий, при условии  , стрелочный указатель показывает численное значение измеряемой температуры.
, стрелочный указатель показывает численное значение измеряемой температуры.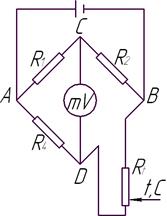 Отсутствие уравновешивающего устройства. Основой измерительной части является мостовая схема в одно из плеч, которой включено термосопротивление.
Отсутствие уравновешивающего устройства. Основой измерительной части является мостовая схема в одно из плеч, которой включено термосопротивление. Под воздействием температуры Rt меняет свое значение, равновесия мостовой схемы нарушается и в измерительной диагонали СД появляется напряжение небаланса Uсд. Uсд=f(T)
Под воздействием температуры Rt меняет свое значение, равновесия мостовой схемы нарушается и в измерительной диагонали СД появляется напряжение небаланса Uсд. Uсд=f(T)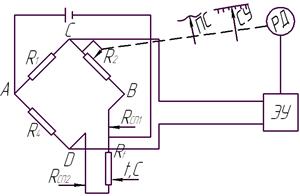 Принцип действия автоматического моста основан на уравновешивании ( компенсации) изменения сопротивления чувствительного элемента изменением сопротивления уравновешивающего устройства.
Принцип действия автоматического моста основан на уравновешивании ( компенсации) изменения сопротивления чувствительного элемента изменением сопротивления уравновешивающего устройства.
 Чувствительным элементом данного прибора является полая одновитковая пружина плоскоовального или плоского сечения.
Чувствительным элементом данного прибора является полая одновитковая пружина плоскоовального или плоского сечения.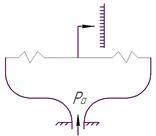
 Сильфон представляет собой гофрированную трубку, выполненную из упругого материала.
Сильфон представляет собой гофрированную трубку, выполненную из упругого материала.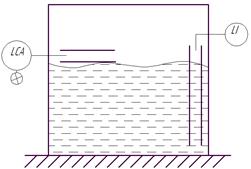
 ,
,  - диэлектрическая проницаемость среды,
- диэлектрическая проницаемость среды,  - диэлектрическая проницаемость вакуума,
- диэлектрическая проницаемость вакуума,  - расстояние между пластинами.
- расстояние между пластинами.



 и все дисп. определители Гурвица были положительные.
и все дисп. определители Гурвица были положительные.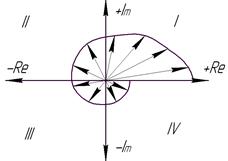
 от 0 до
от 0 до 



 называется зоной нечувствительности и в пределах данной зоны выходная величина с равной вероятностью может принимать противоположные значения.
называется зоной нечувствительности и в пределах данной зоны выходная величина с равной вероятностью может принимать противоположные значения.

 - коэффициент усиления
- коэффициент усиления



 кривая разгона:
кривая разгона: 



 - заданное значение выходной величины объекта управления
- заданное значение выходной величины объекта управления - установившееся значение выходной величины объекта управления.
- установившееся значение выходной величины объекта управления.
 - площадь
- площадь ;
;  ;
; 


 (перерегулирование допускается до 40%)
(перерегулирование допускается до 40%)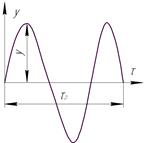
 ,
,  - время запаздывания (время задержки)
- время запаздывания (время задержки) - постоянная времени объекта управления
- постоянная времени объекта управления , то выбирается регулятор прерывистого или дискретного действия т.е. ПЗ –регулятор
, то выбирается регулятор прерывистого или дискретного действия т.е. ПЗ –регулятор выбирается регулятор непрерывного действия это (И, П, ПИ, ПД, ПИД)
выбирается регулятор непрерывного действия это (И, П, ПИ, ПД, ПИД) выбирается многоконтурная система регулирования
выбирается многоконтурная система регулирования