|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Математические модели автоматических регуляторов. ⇐ ПредыдущаяСтр 5 из 5
Автоматическим регулятором называется устройство, которое отображает определённый закон регулирования. По виду выходных величин автоматические регуляторы подразделяются на регуляторы дискретного или прерывного действия и на регуляторы непрерывного действия. Регуляторы дискретного действия – релейные или позиционные регуляторы (Пз - регулятор) К регуляторам непрерывного действия относятся (И, П, ПИ, ПД, ПИД - регуляторы).
Позиционные регуляторы
Пз – регулятор – это устройство, в котором при достижении определённого значения входной величины выходная величина изменяется скачком и принимает конечное число фиксированных значений. В теоретическом плане ПЗ – регуляторы можно представить как идеальные и реальные. Рассмотрим график выходной величины для идеального Пз – регулятора
Рисунок 37
В зависимости от типа технологического процесса регуляторы данного типа могут классифицироваться как регуляторы типов «откр-закр» и «вкл-выкл». Аналитическое выражение выходной величины идеального Пз – регулятора имеет вид
Для идеального Пз – регулятора графики прямого и обратного хода совпадают. Рассмотрим график выходной величины реального Пз – регулятора
Рисунок 38
Величина Параметром настройки данного регулятора является входная величина, которая для однозначной работы данного регулятора должна находиться вне пределов зоны нечувствительности. Больше верхнего предела для условной единицы и ниже нижнего предела для условного нуля. Аналитическое выражение выходной величины имеет вид
Интегральный регулятор И – регулятор
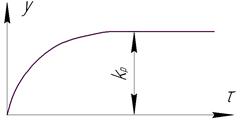
Это регулятор, у которого изменение выходной величины пропорционально интегралу отклонения входной величины x от заданного значения. Уравнение динамики данного регулятора:
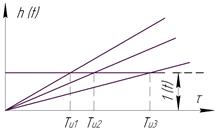
Переходная характеристика данного регулятора записывается уравнением:
Рисунок 39
Время интегрирования можно определить графически рассматривая несколько переходных характеристик с учётом единичного ступенчатого воздействия С увеличением времени интегрирования воздействие входной величины на выходную ослабевает Для увеличения выходной величины и регулирующей величины параметра настройки необходимо уменьшать наоборот. Кривая разгона реального регулятора имеет вид:
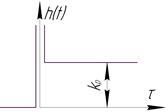
Пропорциональный регулятор Это регулятор, у которого выходная величина y в пределах зоны регулирования пропорциональна изменению входной величины x. Уравнение динамики имеет вид
В основе пропорционального регулятора лежит усилительное динамическое звено. Переходная характеристика данного регулятора имеет вид.
Рисунок 40
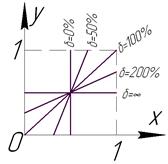
Параметром настройки данного регулятора является предел пропорциональности:
Пределом пропорциональности называется диапазон изменения входной величины выраженный в процентах от максимального, в пределах которого выходная величина изменяется от одного крайнего значения до другого. Предел пропорциональности может изменятся от единиц % до несколькох тысяч. Рассмотрим семейство статических характеристик для различных значений параметров настройки.
Рисунок 41
При увеличении параметра настройки воздействие входной величины на выходную ослабевает, и наоборот. Кривая разгона данного регулятора имеет вид.
Рисунок 42 Пропорционально интегральные регуляторы (ПИ)
Переходная характеристика данного регулятора имеет вид:
Рисунок 43
Кривая разгона данного регулятора имеет вид:
Рисунок 44
В общем случае для увеличения выходной величины ПИ регулятора необходимо уменьшить и время интегрирования и предел пропорциональности.
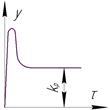
ПД – регулятор
Дифференциальная составляющая данного регулятора в качестве отдельного регулятора не применяется, а используется для того, чтобы изменение выходной величины по времени опережало изменение входной. Переходная характеристика имеет вид:
Рисунок 45
Рисунок 46 ПИД – регулятор
Переходная характеристика
Рисунок 47
Кривая разгона:
Рисунок 48 |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 858; Нарушение авторского права страницы



 называется зоной нечувствительности и в пределах данной зоны выходная величина с равной вероятностью может принимать противоположные значения.
называется зоной нечувствительности и в пределах данной зоны выходная величина с равной вероятностью может принимать противоположные значения.

 - время интегрирования, которое является параметром настройки данного регулятора.
- время интегрирования, которое является параметром настройки данного регулятора.


 - коэффициент усиления
- коэффициент усиления






 кривая разгона:
кривая разгона: