|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Регулирование скорости вращения и устойчивость работы двигателя
Способы регулирования скорости вращения двигателей постоянного тока следуют из соотношений' (10-7) и (10-9). Возможны три способа регулирования скорости вращения. 1. Наиболее удобным, распространенным и экономичным является способ регулирования скорости путем изменения потока Ф6, т. е. тока возбуждения tB. С уменьшением Фа, согласно выражению (10-7), скорость возрастает. Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Фе, т. е. с наименьшей величиной п. Поэтому практически можно только уменьшать Ф^. Следовательно, рассматриваемый способ позволяет регулировать скорость вверх от номинальной. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, в частности мала мощность реостатов для регулирования тока возбуждения. К тому же при уменьшении iB мощность возбуждения Шв уменьшается. Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями ее коммутации. При высоких скоростях коммутация ухудшается вследствие увеличения вибрации щеточного аппарата, неустойчивости щеточного контакта и возрастания реактивной э. д. с, а также вследствие увеличения максимального напряжения между коллекторными пластинами в результате ослабления основного поля и усиления при этом искажающего влияния поперечной реакции якоря (см. § 5-3). Для увеличения диапазона регулирования п посредством ослабления поля в машинах малой и средней мощности с волновой обмоткой якоря иногда применяют раздельное питание катушек возбуждения отдельных полюсов. При этом в одной группе полюсов сохраняют iB = const и большой поток со значительным насыщением участков магнитной цепи, а в другой группе полюсов tB и поток уменьшают. Искажающее влияние поперечной реакции якоря под первой группой полюсов в этом случае будет проявляться значительно слабее. Так как в волновой обмотке напряжение между соседними коллекторными пластинами складывается из э. д. с. р секций, расположенных под всеми полюсами (см. § 3-5), то в результате такого регулирования потока полюсов распределение напряжения между пластинами будет более равномерным. 2. Другой способ регулирования скорости заключается во включении последовательно в цепь якоря реостата или регулируемого сопротивления Rpa, Вместо выражения (10-7) при этом имеем
т. е. в реостате будет теряться 47, 5% приложенного напряжения и столько же мощности, подводимой к цепи якоря. По этой причине данный способ применяется в основном для двигателей небольшой мощности, а для более мощных двигателей используется редко и только кратковременно (пуско-наладочные режимы и т. д.). 3. Регулирование скорости осуществляется также путем регулирования напряжения цепи якоря. Так как работа двигателя при U > UH недопустима, то данный способ, согласно выражениям (10-7) и (10-9), дает возможность регулировать скорость также вниз от номинальной. К. п. д. двигателя при этом остается высоким, так как никаких добавочных, источников потерь в схему двигателя не вносится. Однако в этом случае необходим отдельный источник тока с регулируемым напряжением, что удорожает установку. Отметим, что регулирование скорости путем изменения 1а невозможно, хотя такая возможность на первый взгляд вытекает' из равенства.(10-7). Дело в том, что, согласно равенству (10-3), двигатель при каждой скорости вращения должен развивать определенный момент М, равный моменту сопротивления приводимого механизма М„ при данном значении п. Но при этом в соответствии с выражением (10-8) при данном значении Ф6 величина 1а в двигателе будет при каждом значении М тоже вполне определенной. Различные способы регулирования п более конкретно, применительно к двигателям с различными способами возбуждения; рассматриваются в последующих параграфах. Условия устойчивости работы двигателя. При работе двигателя всегда возникают определенные возмущения режима работы (кратковременные колебания напряжения сети, случайные кратковременные изменения момента нагрузки на валу и т. д.). Такие возмущения чаще всего бывают небольшими и кратковременными, однако при этом происходят, хотя также небольшие и кратковременные, нарушения равенства моментов установившегося режима работы [см. выражение (10-3)], вследствие чего возникает момент Мюв и изменяется скорость вращения. Под устойчивостью работы двигателя понимается его способность вернуться к исходному, установившемуся режиму работы при малых возмущениях его работы, когда действие этих возмущений прекратится. Иными словами, работа двигателя называется устойчивой, если бесконечно малые в пределе возмущения его работы вызывают лишь столь же малые изменения величин, характеризующих режим его работы (например, скорость вращения, ток якоря и т. д.). Двигатель неустойчив в работе, если подобные малые возмущения приводят к большим изменениям режима работы. При неустойчивой работе небольшие кратковременные возмущения вызывают либо непрерывное изменение
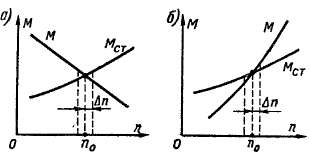
режима (п, Ia и т. д.) в каком-либо одном направлении, либо приводят к колебательному режиму работы с возрастанием амплитуд колебаний п, 1а и т. д. Естественно, что в условиях эксплуатации необходимо обеспечить устойчивый режим работы двигателя. При неустойчивости двигателя нормальная его работа невозможна, и обычно происходит авария. Неустойчивая работа возможна также и у генераторов. В § 9-7 была рассмотрена неустойчивость параллельной работы генераторов смешанного возбуждения при отсутствии уравнительного провода. Режим самовозбуждения генераторов постоянного тока (см. § 9-4) также в сущности представляет собой неустойчивый режим работы, так как iB и U непрерывно изменяются. Работа генератора параллельного возбуждения при Rs = RB.Kp также неустойчива, так как если несколько изменить величину RB, то напряжение Uзначительно изменится, т. е. возрастет до некоторой конечной величины или упадет почти до нуля. Устойчивость работы двигателя зависит от вида его механической характеристики М = f{n) и от вида зависимости момента сопротивления на валу от скорости вращения Мст = /(«)• Вид последней зависимости определяется свойствами рабочей машины, приводимой в движение двигателем. Например, у металлорежущих станков, если установка резца не изменяется, М„ да const, т. е. Мст не зависит от скорости вращения, а у вентиляторов и насосов М„ ~ п2. На рис. 10-4, а я б изображены два характерных случая работы двигателя. Установившемуся режиму работы (М = М„) со скоростью вращения п0 соответствует точка пересечения указанных двух характеристик. Если зависимости М = f (п) и Мст = / (п) имеют вид, изображенный на рис. 10-4, а, то при случайном увеличении п в результате возмущения на An тормозящий момент Мсг станет больше движущего М (Мст > М) и поэтому двигатель будет затормаживаться, что заставит ротор вернуться к исходной скорости п0. Точно так же, если в результате возмущения скорость двигателя уменьшится на An, то будет М„ < М, поэтому ротор станет ускоряться и снова будет п = п0. Таким образом, в рассматриваемом Рис. 10-4. Устойчивый (а) и неустойчивый (б) режимы работы двигателя случае работа устойчива. Как следует из рис. 10-4, а, в этом случае что и является признаком, или критерием, устойчивости работы двигателя. При зависимостях М = f (п) и Мст = / (п) вида рис. 10-4, б работа неустойчива. Действительно, при увеличении п от п = п0 до п = п0 + An будет М > Мст, возникнет избыток движущего момента, скорость п начнет нарастать, причем избыточный момент М — УИСТ увеличится еще больше, п еще возрастет и т. д. Если в результате возмущения п = п0 — An, то М< Мсг и п будет непрерывно уменьшаться. Поэтому работа в точке М = Мст и п = п0 невозможна. Как следует из рис. 10-4, б, в этом случае что является признаком неустойчивости работы двигателя. Из изложенного следует, что двигатель с данной механической характеристикой М = f (n) может работать устойчиво или неустойчиво в зависимости от характеристики Мст = / (п) рабочей машины. Возникновение неустойчивости наиболее вероятно при такой механической характеристике двигателя М = f (п) или п = f (M), когда Мига увеличиваются или уменьшаются одновременно (рис. 10-4, б). В частности, в этом случае работа неустойчива при Мст = /(«)= const (например, металлорежущие станки). Поэтому двигателей с такими механическими характеристиками не строят. Изложенное здесь в равной мере относится к устойчивости двигателей как постоянного, так и переменного тока, а также любых видов двигателей. Изменение режима работы. Двигатели постоянного тока, как, впрочем, и двигатели переменного тока, обладают при соблюдении условий устойчивости замечательной способностью автоматически, без внешнего регулирующего воздействия, приспосабливаться-к изменившимся условиям работы. В этом смысле можно сказать, что электрические двигатели обладают свойством саморегулирования. Проиллюстрируем сказанное на примере двигателя параллельного возбуждения. Допустим, что такой двигатель работает при U = const, ie = = const и, следовательно, Фв « const и нагрузочный момент М„, развиваемый рабочей машиной, увеличивается. Тогда М < Mzr, возникает Мтн < 0 [см. выражение (10-2)] и п начинает умень-
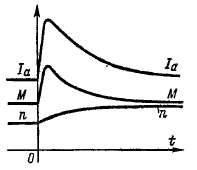
шаться. Но при этом будет уменьшаться также Еа, ток 1а [см. выражение (10-5)] и момент М Гсм. выражение (10-8)] начнут увеличиваться, причем это будет происходить до тех пор, пока снова не наступит равновесие моментов М = М„. Аналогичным образом изменяется также режим, если М„ уменьшится, причем в этом случае я и Еа начнут увеличиваться, а 1а и М — уменьшаться до тех пор, пока снова будет М = Мст и Мтш = 0. Допустим теперь, что с помощью реостата Rp в (см. рис. 10-2) произведено уменьшение iB. При этом Фв будет уменьшаться, однако вследствие механической инерции ротора скорость п в первый момент не изменится. Тогда, согласно выражению (10-6), Еа уменьшится, а вследствие этого 1а и М возрастут [см. выражения (10-5) и (10-8)1. При этом будет М > М„, в соответствии с равенством (Ю-2) Мдин > 0, и скорость п начнет увеличиваться. Это вызовет, согласно тем же соотношениям, увеличение Еа и уменьшение 1а и М до тех пор, пока снова не наступит равновесие моментов М = = М„ и Мдин = 0 (рис. 10-5). При увеличении iB явления развиваются в обратном направлении. Необходимо отметить, что резких изменений iB при регулировании допускать нельзя, так как U и Еа [см. выражение(10-5)] являются близкими величинами и небольшое изменение Фв и Еа ведет к большим изменениям /а и М. Аналогичным образом происходит переход к новому режиму при изменении других внешних условий (например, введение сопротивления в цепь якоря и т. д.), а также в двигателях с другими способами возбуждения. Из изложенного следует, что поведение двигателя при установившемся режиме работы и переходах к новому режиму работы всецело определяется уравнениями равновесия моментов (10-2) и напряжения цепи якоря (10-4). |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 490; Нарушение авторского права страницы