|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Двигатели параллельного возбуждения
Естественные скоростная и механическая характеристики. Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства. Скоростная и механическая характеристики двигателя определяются равенствами (10-7) и (10-9) при U = const и iB = const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными. Рис. 10-5. Переход двигателя параллельного возбуждения к новому режиму работы при уменьшении потока
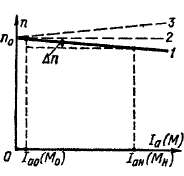
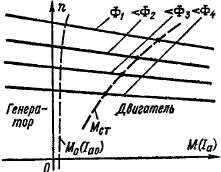
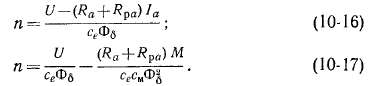
Если щетки находятся на геометрической нейтрали, при увеличении 1а поток Фв несколько уменьшится вследствие действия поперечной реакции якоря. В результате этого скорость п, согласно выражению (10-7), будет стремиться возрасти. С другой стороны, падение напряжения RaIa вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис. 10-6; 1 — при преобладании влияния RJa\ 2 — при взаимной компенсации влияния RJa и уменьшения Ф6; 3 — при преобладании влияния уменьшения Фа. Ввиду того что изменение Фв относительно мало, механические характеристики п = f (M) двигателя параллельного возбуждения, определяемые равенством (10-9), при U = const и гв = const совпадают по виду с характеристиками п = f (Ia) (рис. 10-6). По этой же причине эти характеристики практически прямолинейны. Характеристики вида 3 (рис. 10-6) неприемлемы по условиям устойчивости работы (см. § 10-3). Поэтому двигатели параллельного возбуждения изготовляются со слегка падающими характеристиками вида / (рис. 10-6). В современных высокриспользованных машинах ввиду довольно сильного насыщения зубцов якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида / (рис. 10-6) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, н. с. которой составляет до 10% от н. с. параллельной обмотки возбуждения. При этом уменьшение Фв под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей, а двигатель с такой обмоткой по-прежнему называется двигателем параллельного возбуждения. Изменение скорости вращения An (рис. 10-6) при переходе от холостого хода (/„ = 1а0) к номинальной нагрузке (1а — 1аи) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2—8% от пн. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и пр.). Рис. 10-6. Виды естественных скоростных и механических характеристик двигателя параллельного возбуждения Регулирование скорости посредством ослабления магнитного потока производится обычно с помощью реостата в цепи возбуждения /? р в (см. рис. 9-1, б; 10-2). При отсутствии добавочного сопротивления в цепи якоря (Rpa = 0) и U = const характеристики п — \ (1а) и п = / (М), определяемые равенствами (10-7) и (10-9), для разных значений Rps, iB или Фа имеют вид, показанный да рис. 10-7. Все характеристики п = f (Ia) сходятся на оси абсцисс (п = 0) в общей точке при весьма большом токе 1а, который, согласно выражению (10-5), равен
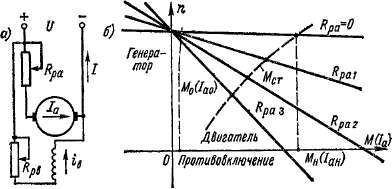
Рис. 10-7. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения Ia=U/Ra. Однако механические характеристики пересекают ось абсцисс в разных точках. Нижняя характеристика на рис. 10-7 соответствует номинальному потоку. Значения п при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривой Мст = f (п) для рабочей машины, соединенной с двигателем (штриховая ли«ия на рис. 10-7). Точка холостого хода двигателя (М = Мо, 1а = /а0) лежит несколько правее оси ординат на рис. 10-7. С увеличением скорости вращения п вследствие увеличения механических потерь Мо и 1а0 также увеличиваются. Если в этом режиме с помощью приложенного.извне момента вращения начать увеличивать скорость вращения п, то Еа [см. выражение (10-6)] будет увеличиваться, а 1а и М будут, согласно равенствам (10-5) и (10-8), уменьшаться. При 1а = 0 и М = 0 механические и магнитные потери двигателя покрываются за счет подводимой к валу мехнической мощности, а при дальнейшем увеличении скорости /о и М изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рис. 10-7 левее оси ординат). Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1: 2, Изготовляются также двигатели с регулированием скорости таким способом в пределах до 1: 5 или даже 1: 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами (см. § 5-3) необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов (см. § 10-3) или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается. Регулирование скорости сопротивлением в цепи якоря, искусственные механическая и скоростная характеристики. Если последовательно в цепь якоря включить добавочное сопротивление Rpa (рис. 10-8, а), то вместо выражений (10-7) и (10-9) получим
Сопротивление Rpa может быть регулируемым и должно быть рассчитано на длительную работу. Цепь возбуждения должна быть включена на напряжение сети.
Рис. 10-8. Схема регулирования скорости вращения двигателя параллельного возбуждения с помощью сопротивления в цепи якоря (а) и соответствующие механические и скоростные характеристики (б) Характеристики п — f (М) и п = f (Ia) для различных значений /? рг = const при U — const и iB = const изображены на рис. 10-8, б (Rpai < Rpaz < ^роз)- Верхняя характеристика (Rpa = 0) является естественной. Каждая из характеристик пересекает ось абсцисс (п — 0) в точке с Продолжения этих характеристик под осью абсцисс на рис. 10-8 соответствуют торможению двигателя противовключением. В этом случае п < 0, э. д. с. Еа имеет противоположный знак и складывается с-напряжением сети U, вследствие чего а момент двигателя М действует против направления вращения и является поэтому тормозящим.
Если в режиме холостого хода (1а = 1п0) с помощью приложенного извне момента вращения начать увеличивать скорость враще-ьия, то сначала достигается режим 1а = 0, а затем 1а изменит направление и машина перейдет в режим генератора (участки характеристик на рис. 10-8, б слева от оси ординат). Как видно из рис. 10-8, б, при включении Rpa характеристики становятся менее жесткими, а при больших величинах Rpa — круто падающими, или мягкими. Если кривая момента сопротивления Мст = / (п) имеет вид, изображенный на рис. 10-8, б штриховой линией, то значения п при установившемся режиме работы для каждого значения Rpa
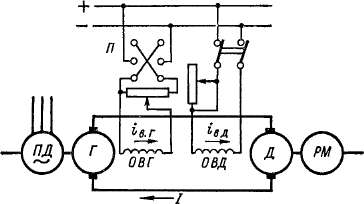
Рис 10-9 Схема агрегата «генератор—двигатель» для регулирования скорости двигателя независимого возбуждения определяются точками пересечения соответствующих кривых. Чем больше Rpa, тем меньше п и ниже к. п. д. Регулирование скорости посредством изменения напряжения якоря может осуществляться с помощью агрегата «генератор—двигатель» (Г — Д), называемого также агрегатом Леонарда (рис. 10-9). В этом случае первичный двигатель ПД (переменного тока, внутреннего сгорания и т. п.) вращает с постоянной скоростью генератор постоянного тока Г. Якорь генератора непосредственно приключен к якорю двигателя постоя'нного тока Д, который служит приводом рабочей машины РМ. Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от независимого источника — сети постоянного тока (рис. 10-9) или от возбудителей (небольших генераторов постоянного тока) на валу первичного двигателя ПД. Регулирование тока возбуждения генератора tB г должно производиться практически от нуля (на рис. 10-9 с помощью реостата, включенного по потенциометрической схеме). При необходимости реверсирования двигателя надо изменить полярность генератора (на рис. 10-9 с помощью переключателя Я). Пуск двигателя Д и регулирование его скорости осуществляют следующим образом. При максимальном гв д и гв г = 0 производят пуск первичного двигателя ПД. Затем плавно увеличивают ig г, и при небольшом напряжении генератора U двигатель Д придет во вращение. Регулируя, далее, U в пределах до U =* UH, можно получить Любые скорости вращения двигателя до п = ин. Дальнейшее увеличение п возможно путем уменьшения tB д. Для реверсирования двигателя уменьшают tB г до нуля, переключают ОВГ и снова увеличивают iB т от значения iB r = 0. Когда рабочая машина создает резко пульсирующую нагрузку (например, некоторые прокатные станы) и нежелательно, чтобы пики нагрузки полностью передавались первичному двигателю или в сеть переменного тока, двигатель Д можно снабдить маховиком (агрегат Г—Д—М, или агрегат Леонарда — Ильгнера). В этом случае при понижении п во время пика нагрузки часть этой нагрузки покрывается за счет кинетической энергии маховика. Эффективность действия маховика будет больше при более мягкой характеристике двигателя ПД или Д. В последнее время все чаще двигатель ПД и генератор Г заме-г няют ртутным или полупроводниковым выпрямителем с регулируемы! * напряжением. В этом случае рассматриваемый агрегат называют также вентильным (ионным, тиристорным)' п р и в о д о м. Рассмотренные агрегаты используются при необходимости регулирования скорости вращения двигателя с высоким к. п. д. в широких пределах — до 1: 10 й более (крупные металлорежущие станки, прокатные станы и т. д.). Отметим, что изменение U с целью регулирования п по схеме рис. 9-1, 0> и 10-8, а не дает желаемых результатов, так как одновременно с изменением напряжения цепи якоря изменяется пропорционально U также ток возбуждения. Так как регулирование V можно производить только от значения U — UK вниз, то вскоре магнитная цепь окажется ненасыщенной, вследствие чего U и te будут изменяться пропорционально друг другу. Согласно равеяству (10-7), п при этом существенным образом не меняется. В последнее время все больше распространяется так называемое импульсное регулирова н,.и е двигателей постоянного' зша. При этом цепь якоря двигателя питается от источника па-стйЯнного тока с постоянным напряжением через тиристоры, которые, периодически, с частотой 1000—ЗШО гц включаются' и отключаются. Чтобы сгладить пр» этом кривую тока якоря, на его зажимах подключаются конденсаторы. Напряжение на зажимах-якоря в этом случае практически постоянно и пропорционально отношению времени включения тиристоров ко времени-продолжи-тельдасти всего цикла. Таким образом, импульсный метод позво- ляет регулировать скорость вращения даигателя при его питании от источника с постоянным напряжением в широких пределах без реостата в цепи якоря и практически без дополнительных потерь. Таким же образом, без пускового реостата и без дополнительных потерь, может производиться пуск двигателя. Импульсный способ регулирования в экономическом отношении весьма выгоден для управления двигателями, работающими в режимах переменной скорости вращения с частыми пусками, например на электрифицированном транспорте. Рабочие характеристики представляют собой зависимости потребляемой мощности Ръ< потребляемого тока /, скорости п, момента М и к. п. д. т] от полезной мощности Р2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой Рис. 10-10. Рабочие характеристики двигателя параллельного возбуждения Ра = 10 кет, UH = 220 в, «н = = 950 об/мин мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рис. 10-10. Одновременно с увеличением мощности на валу Р2 растет и момент на валу М. Поскольку с увеличением Р% и М скорость п несколько уменьшается, то М = Р2/п растет несколько быстрее Р2. Увеличение Р2 и М, естественно, сопровождается увеличением тока двигателя /. Пропорционально / растет также потребляемая из сети мощность Рг. При холостом ходе (Р2 = 0) к. п. д. ц = 0, затем с увеличением Р2 сначала ц быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря г\ снова начинает уменьшаться. |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 568; Нарушение авторского права страницы