|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Регулирование скорости вращения посредством введения добавочной э. д. с. во вторичную цепь двигателя.
Регулирование скорости вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом к. п. д. установки. Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам фазного двигателя приемник электрической энергии в виде подходящей для этой цели вспомогательной электрической машины. Эта машина будет работать в режиме двигателя и оказывать воздействие на регулируемый асинхронный двигатель, развивая напряжение на его вторичных зажимах, так как при вращении вспомогательной машины в ее якоре индуктируется э. д. с. Можно также сказать, что задачей вспомогательной машины, как и реостата при реостатном регулировании, является создание «подпора» напряжения на контактных кольцах регулируемого асинхронного двигателя, ибо наличие определенного напряжения на кольцах U2K — непременное условие выдачи с этих колец определенной мощности РSK = m2U2KI2 cos ф2 во внешнюю цепь двигателя. Вместе с тем, вспомогательная машина в отличие от реостата позволяет полезно использовать эту мощность. Прежде всего рассмотрим вопрос о влиянии на работу фазного асинхронного двигателя внешней добавочной э. д. с. £ д, вводимой
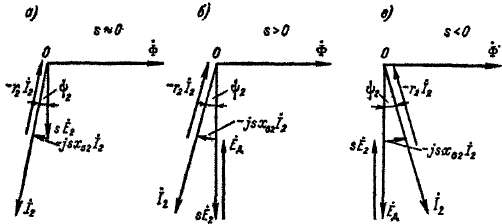
во вторичную цепь двигателя с помощью его контактных колец, при условии, что частота этой добавочной э. д. с. всегда равна частоте вторичного тока и э. д. с. /2 = s/i самого двигателя. На рис. 28-13, а изображена векторная диаграмма вторичной цепи асинхронного двигателя при ЕА — 0. Вторичный ток двигателя имеет величину, необходимую для создания нужного электромагнитного момента М в соответствии с величиной момента нагрузки М„ на валу.
Рис, 28-13. Векторные диаграммы вторичной цепи асинхронного двигателя при отсутствии добавочной э. д. с. (а) и при введший этой э. д. с, для уменьшения (б) и увеличения (в) скорости вращения Если теперь so вторичную цепь ввести э. д. с. Еж встречно э. д. с. скольжения £ «« в этой же цепи, то вторичный ток в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s — увеличиваться. При этом, согласно равенству (28-Ш), ток 1г, а вместе с ним и момент М будут увеличиваться. Это будет происхбдить до тех пор, пока опять не наступит равновесие моментов М = М„ на валу. Двигатель при этом будет работать с увеличенным скольжением s, а векторная диаграмма вторичной цепи приобретет вид, изображенный на рис. 28-13, б. Очевидно, что посредством регулирования величины ЕА можно регулировать величину s и, следовательно, скорость вращения двигателя. Предположим теперь, что э. д с. £ д имеет по сравнению с рассмотренным случаем противоположное направление и совпадает
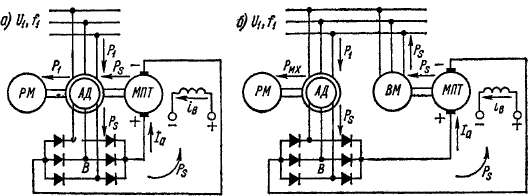
В первый момент после введения э, д. с. Ея ток /2 и момент ЛЯ возрастут, двигатель будет ускоряться и s будет уменьшаться. При достаточной величине £ д величина s уменьшится до нуля, и если ток /2, создаваемый в этом случае только за счет действия Еж, все еще будет велик по сравнению с током, необходимым для создания момента М — МСт, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и э. д. с. Ёц при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока в соответствии с выражением (28-11) ток не упадет до необходимой величины. При s < О угол чр2 = aretjg отрицали тельный й векторная диаграмма вторичной цепи двигателя имеет вид, показанный на рис. 28-13, в. Ток \% при этом будет иметь составляющую, совпадающую с Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos < p двигателя повысится. Таким образом, с помощью добавочной э. д. с. £ д, путем изменения ее величины и направления, можно осуществить плавной двухзонное регулирование скорости двигателя: ниже и выще синхронной. Если пренебречь потерями, то мощность источника добавочной э. д. с. равна мощности скольжения sPm, причем при s > 0 этот источник является приемником и потребляет энергию из вторичной цепи двигателя, а при s < 0 — генератором и отдает мощность во вторичную цепь двигателя. Механическая мощность, развиваемая магнитным полем двигателя, при s > 0 будет меньше Рш, а при s < 0 в соответствии с изменением знака мощности скольжения Рш > Рэя. Каскад асинхронного двигатели с машиной постоянного тока. Реализация рассмотренного способа регулирования скорости вращения асинхронного двигателя посредством добавочной э. д. с. осуществляется в каскадных соединениях двигателя со вспомогательными электрическими машинами. Рассмотрим здесь каскадные соединения асинхронного двигателя с машиной постоянного тока. На рис. 28-14, а показана схема каскада фазного асинхронного двигателя АД, приводящего в движение некоторую рабочую машину РМ, с машиной постоянного тока независимого возбуждения
МПТ. Цепь якоря МПТ приключена к контактным кольцам асинхронного двигателя через ионный или полупроводниковый выпрямитель В, соединенный по трехфазной мостовой схеме. Выпрямитель преобразовывает переменный ток частоты скольжения /2 = sfx во вторичной цепи АД в постоянный ток в цепи якоря МПТ. Э. д. с. якоря МПТ в данном случае и является той рассмотренной выше добавочной э. д. с. Ел, которая (в данном случае с помощью выпрямителя В) вводится во вторичную цепь двигателя АД. Регулирование величины этой э. д. с. и скорости вращения АД производится путем регулирования тока возбуждения МПТ. На схеме рис. 28-14, а машина постоянного тока МПТ расположена на валу асинхронного двигателя АД. Она преобразовывает
Рис. 28-14. Схемы электромеханического (а) и электрического (б) каскадов асинхронного двигателя АД с машиной постоянного тока МПТ мощность скольжения Ps, потребляемую из вторичной цепи АД, в механическую мощность, которая через вал двигателя АД вместе с механической мощностью Рмх двигателя передается рабочей машине РМ. Такой каскад называется электромеханическим. Если при регулировании скорости вращения обеспечить полное использование мощности АД (Рх = Рн = const) и пренебречь потерями, то в этом каскаде мощность, передаваемая рабочей машине РМ, также остается при всех скоростях постоянной и равной номинальной мощности. В связи с этим электромеханический каскад иногда условно называют также каскадом постоянной мощности. Необходимая номинальная мощность вспомогательной машины каскада (в данном случае МПТ) зависит от пределов регулирования скорости:
Каскад с выпрямителями допускает регулирование скорости только вниз от синхронной (s > 0). Если заменить выпрямитель управляемым ионным или полупроводниковым преобразователем, способным производить также обратное преобразование — постоянного тока в переменный, то можно осуществить также регулирование скорости вверх от синхронной (s < 0). Указанные на рис. 28-14 направления передачи мощности скольжения при s < 0 изменятся на обратные. Ввиду сложности системы управления таким преобразователем и других причин эти каскады до сих пор применения не получили. Ранее применялись также каскады, выполненные по схеме рис. 28-14, а, в которой вместо выпрямителя использовался одноякорный преобразователь переменного тока в постоянный (см. § 41-1). На рис. 28-14, б изображена схема каскада, которая отличается от схемы рис. 28-14, а тем, что МПТ соединена механически со вспомогательной асинхронной или синхронной машиной ВМ. В этом каскаде мощность скольжения Р„ при s > 0 передается с помощью ВМ, работающей в режиме генератора, обратно в сеть переменного тока. При s < 0 ВМ работает в режиме двигателя. Такой каскад называется электрическим. В этом каскаде машине РМ передается только механическая мощность двигателя АД которая при P\ — Pn — const уменьшается пропорционально скорости вращения. Момент на валу РМ при этом остается постоянным, вследствие чего такой каскад иногда условно называют также каскадом с постоянным моментом. Машины ВМ и МПТ на схеме рис. 28-14, б можно заменить трансформатором и полупроводниковым преобразователем постоянного тока в переменный и обратно. Каскады позволяют осуществить экономичное и плавное регулирование скорости вращения асинхронного двигателя, однако вспомогательные машины и преобразователи удорожают установку. Поэтому каскады целесообразно применять только для привода мощных производственных механизмов, требующих регулирования скорости в достаточно широких пределах (например, прокатные станы, весьма мощные вентиляторы и др.). Рассмотренные выше каскадные соединения в связи с использованием в них ионных или полупроводниковых вентилей называют также вентильными каскадами. Существуют также другие системы каскадов, в частности с использованием коллекторных машин переменного тока (см- § 42-3). Каскадные установки выполняются на мощности в сотни и тысячи киловатт с регулированием скорости вращения в пределах до 3: 1 и больше.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 570; Нарушение авторского права страницы