|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Асинхронный генератор с самовозбуждением
Генераторный режим работы асинхронной машины рассматривался в § 24-5. При этом было выяснено, что асинхронный генератор потребляет реактивный намагничивающий ток для создания магнитного потока й поэтому должен работать параллельно с сетью переменного тока, к которой присоединены другие машины или установки (например, синхронные генераторы), способные снабжать
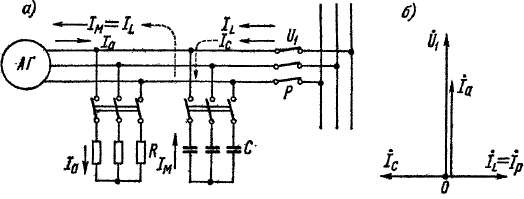
Рис. 29-6. Схема асинхронного генератора АГ с местной нагрузкой R и конденсаторной батареей С {а) и векторная диаграмма (б) реактивным током асинхронные генераторы идругих потребителей. Наряду с этим асинхронный генератор может работать также л режиме самовозбуждения на отдельную сеть, получая реактивный ток возбуждения от конденсаторов, прнключаемых к зажимам асинхронного генератора. 'Для выяснения некоторых положений рассмотрим схему рис. 29-6, на которой изображен асинхронный генератор АГ, работающий параллельно с сетью и потребляющий из нее реактивный (индуктивный) ток lL = /. Этот ток создает в генераторе магнитное поле, в то время как активный ток 1а, вырабатываемый генератором АГ, полностью потребляется местным Потребителем R. Приключим теперь к зажимам, генератора конденсаторы С такой емкости, чтобы потребляемый
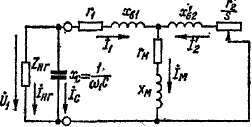
Рис 29-7. Схема замещения самоВоз-буждающегося асинхронного генератора с нагрузкой Zat и емкостным сопротивлением конденсаторной батареи хс ими из сети емкостный ток /с по величине был равен току IL, Очевидно, что при этом потребляемый из сети ток Рубильник Р можно поэтому отключить, и асинхронный генератор АГ будет работать на изолированную местную сеть с приемниками RnC. Так как при этом, с одной стороны, генератор продолжает потреблять ток IL = 1ш, а с другой стороны, конденсаторы продолжают потреблять ток /с = lh, то можно сделать следующие выводы: 1) источниками реактивного намагничивающего тока /м = /j. для генератора теперь являются конденсаторы; 2) утверждения «конденсатор потребляет из сети (или от асинхронного генератора) емкостный ток» и «конденсатор отдает в сеть (яля асинхронному генератору) индуктнвйый ток» равноценны; 3) равноценны также утверждения «асинхронная машина потребляет из сети индуктивный ток» и «асинхронная машина отдает в сеть емкостный ток». В практике энергетических систем термины «реактивный ток» и «реактивная мощность» принято связывать с отстающим (индуктивным) током. При этом говорят, что конденсаторы отдают в сеть реактивный ток и, реактивную мощность и являются гейераторами реактивной мощности. Из «казааиого следует, что при чисто активной нагрузке асинхронного генератора мощность конденсаторов должна равняться реактивной (намагничивающей) мощности генератора. Если же нагрузка будет иметь смешанный активно-индуктивный характер, то мощность конденсаторной батареи необходимо соответственно увеличить, чтобы она покрывала также реактивную мощность нагрузки. При смешай-ной активно-емкостной нагрузке требуется конденсаторная батарея меньшей мощности, а при определенных условиях эта батарея становится излишней. Схема замещениа-асинхронного генератора с самовозбуждением при помощи конденсаторов и с нагрузкой ZST изображена на рис. 29-7. На основании этой схемы могут быть найдеды все соотношения и величины, характеризующие режим работы генератора. В частности, на основе баланса реактивных мощностей с учетом потерь реактивной мощности в сопротивлениях хЛ, x'oi и хы мождо определить необходимую мощность « необходимую емкость конденсаторов. Векторная диаграмма самого асинхронного генератора с самовозбуждением имеет обычный вид и не зависит от того, откуда генератор потребляет необходимую реактивную мощность. Рис. 29-8. К выяснению условий самовозбуждения асинхронного генератора
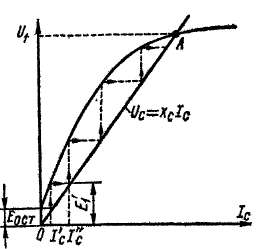
Выяснив в общих чертах работу асинхронного генератора с самовозбуждением в установившемся режиме, рассмотрим процесс его самовозбуждения на холостом ходу (рис. 29-8), пренебрегая активными сопротивлениями. Ввиду наличия потока остаточного намагничивания ротора асинхронной машины, при вращении ротора в обмотке статора индуктируется некоторая э д. с. £ ост (рис. 29-8). Эта э. д. с. вызывает в конденсаторах ток 1'с, который, протекая по обмотке статора машины, усиливает его магнитный поток. В результате индуктируемая э. д. с. и ток конденсатора увеличиваются и т. д. На рис. 29-8 зависимость индуктируемой в обмотке статора генератора э. д.с. £ i от намагничивающего тока в этой обмотке /м или от тока конденсатора /с = /м изображена в виде кривой холостого хода или кривой намагничивания (жО1 + + хм)1с- Прямая U =• хс1с определяет зависимость напряжения конденсатора от его тока. Процесс самовозбуждения на рис. 29-8 условно изображен ступенчатой линией. Э. д. с. остаточного намагничивания вызывает в конденсаторе ток Очевидно, что процесс самовозбуждения асинхронного генератора во многом аналогичен процессу самовозбуждения генератора постоянного тока (см. § 9-4). Выше предполагалось, что первоначальный толчок тока статора при самовозбуждении возникает в результате действия потока остаточного намагничивания. Вместе с тем роль первоначального толчка может сыграть также ток разряда предварительно заряженной конденсаторной батареи, наводка тока внешним магнитным полем и флуктуация электронов в цепи обмотки статора. Последние две причины на практике часто оказываются недостаточно сильными для развития самовозбуждения. Мощность конденсаторной батареи самовозбуждающегося асинхронного генератора достаточно велика (до 70—100% от номинальной мощности генератора), что делает установку дорогой. В связи с этим такие генераторы находят в настоящее время весьма ограниченное применение. Иногда явление самовозбуждения асинхронной машины с подключенными к ней конденсаторами используется для торможения асинхронных двигателей после отключения их от сети. Торможение при этом происходит за счет потерь, возникающих в самовозбужден-ной машине и приключенных к ней сопротивлениях. Самовозбуждение асинхронной машины возможно также при включении конденсаторов во вторичную цепь, однако этот случай ввиду малой частоты в цепи ротора малоэкономичен. § 29-3. Асинхронные машины с массивным ротором Ротор асинхронной машины можно изготовить из массивной стальной поковки и без пазов. В этом случае роль обмотки ротора играет сам массивный ротор, в котором вращающееся магнитное поле будет индуктировать токи. Массивный ротор имеет большое преимущество в прочности. В связи с этим асинхронные двигатели на высокие скорости вращения (10 000—100 000 об/мин)
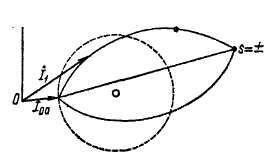
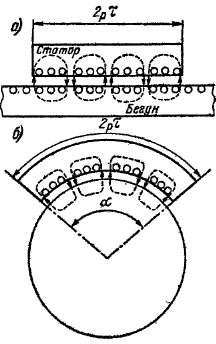
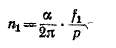
строятся с массивным ротором. Такие двигатели применяются в различных установках специального характера, в частности в гироскопических навигационных устройствах, и питаются током повышенной частоты (400—1000 гц). Активное г2 и индуктивное хл сопротивления массивного ротора ввиду сильно выраженного поверхностного эффекта значительно зависят от скольжения. Так, в случае / = 50 гц при пуске (s = 1) эквивалентная глубина проникновения токов в роторе составляет только около Змм, приs= 0, 02 — около 20мм, npns = = 0, 001 — около 100 мм. Поэтому при пуске сопротивление г2 весьма велико и хл мало, а с уменьшением скольжения сопротивление г2 уменьшается и ха2 увеличивается. Вследствие подобного изменения параметров геометрическое место токов машины с массивным ротором имеет вид, изображенный на рис. 29-9 сплошной линией. Для сравнения там же штриховой линией показана круго- fy^$=/ вая диаграмма асинхронного двигателя с постоянными- параметрами. В результате сильного проявления поверхностного эффекта пусковой момент двигателя с массивным ротором достаточно велик (Ма/Мя = 1, 5-V- 2, 0). Однако двигатели малой и средней мощности с массивными роторами при /= 50гц имеют низкие к. п. д. и коэффициент мощности, так как при Рис. 29-9. Геометрическое место токов скольжении s = 0, 02 -з- 0, 05 глу- асинхронной машины с массивным ро-бина проникновения тока и потокатором в сталь ротора мала, активное и магнитное сопротивления ротора магнитному потоку велики, вследствие чего двигатель имеет большое номинальное скольжение и большой намагничивающий ток. С увеличением геометрических размеров машины, а также при увеличении номинальной скорости вращения рабочие характеристики двигателя улучшаются. Так, асинхронный двигатель с массивным ротором на / = 50 гц и Ря = = 20 000 -з- 50 000 кет имел бы номинальное скольжение значительно менее 1%. В двигателях относительно небольшой мощности на высокие скорости вращения для улучшения рабочих характеристик иногда внешнюю поверхность массивного стального ротора покрывают медью. С этой же целью применяются медные кольца, прикрепленные к торцевым поверхностям массивного ротора. Роль этих колец аналогична торцовым короткозамыкающим кольцам беличьей клетки, и активное сопротивление ротора с такими кольцами уменьшается. Иногда на цилиндрической поверхности ротора выполняют также пазы, но без укладки в них обмотки. При этом площадь внешней рабочей поверхности ^ротора, нагруженной токами, увеличивается, что приводит к уменьшению активного сопротивления ротора. § 29-4. Линейные и дуговые асинхронные машины Если представить себе, что обычный круглый статор асинхронного двигателя разрезан по осевой плоскости и выпрямлен в плоскость или разогнут по дуге большего радиуса, чем радиус исходного круглого статора, то получится статор линейной (рис. 29-10, о) или дуговой (рис. 29-10, б) асинхронной машины. Трехфазная обмотка такого статора создает в воздушном зазоре в пределах сердечника статора соответственно бегущее или вращающееся магнитное поле. Движущаяся часть линейной машины называется бегуном, а движущаяся часть дуговой машины — ротором. Бегун и ротор могут иметь конструкцию, свойственную роторам нормальных короткозамкнутых асинхронных машин, т. е. иметь сердечники из листовой электротехнической стали и обмотку Рис. 29-9. Геометрическое место токов асинхронной машины с массивным ротором типа беличьей клетки, расположенную в пазах сердечника бегуна и ротора. Они могут быть изготовлены также массивными — из стали или чугуна, и в этом случае роль вторичной обмотки выполняет само тело бегуна или ротора.' Линейную асинхронную машину можно выполнить также в виде двух статоров, обращенных друг к другу, и бегуном при этом служит проводящее тело, расположенное в зазоре между сердечниками статоров. Проводящее вторичное тело в виде шины может быть также неподвижным, а „статор" — находиться на движущемся экипаже. Такие устройства перспективны для высокоскоростного пассажирского транспорта. Принцип действия рассматриваемых машин одинаков с принципом действия нормальных асинхронных машин: бегущее или вращающееся поле статора индуктирует в обмотке бегуна или ротора токи, в результате взаимодействия которых с магнитным полем возникают электромагнитные силы, действующие на бегун и ротор. В установившемся режиме скольжение бегуна или ротора относительно магнитного поля обычно невелико. Особенностью дуговой машины является то, что ее скорость вращения не связана так жестко с числом пар полюсов р и частотой fi, как в нормальной асинхронной машине. Действительно, пусть статор.машины (рис. 29-10, 6) имеет р пар полюсов' и занимает дугу с центральным углом а, -За один период тока вращающееся поле перемещается на 2т или на угол ajp, а в тече» ние одной секунды поле совершает оборотов. Выбирая различные а, полу чаем различные скорости вращения. Щщ а = 2я имеем нормальную асинхронную машину с «i=/i/P. об/сек.
P#c. 29-10, Линейная (а) я дуговая (б) асинхронные машины Линейные асинхронные машины можно использовать для получения возвратно-поступательного движения. При этом производится периодическое пере* ключеиие обмотки статора (изменение чередования фаз) и. машина работает в циклическом режиме ускорения, движения и торможения. Такой режим в энергети; ческом отношении невыгоден, так как в течение каждого цикла работы при уско^ рении и торможении бегуна бесполезно теряется относительно большое количество-энергии в виде тепла, выделяемого в обмотках. Количество теряемой энергии тем больше, чем больше масса бегуна и его максимальная скорость. В связи с этим Явигатели возвратно-поступатального движения не получили заметного распространения. Применение линейных и дуговых асинхронных машин и родственных им магнитогидродинамическ'их машин (см, §29-5) в качестве электрических машин специального назначения расширяется. В линейных и дуговых асинхронных машинах возникают краевые эффекты, вызванные 'уем. что их статоры не" замкнуты в кольцо и имеют конечную длину. Вследствие этого энергетические показатели линейных и дуговых машин хуже» чем у нормальных асинхронных машин.
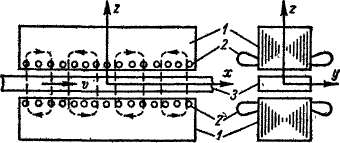
§ 29-5. Магнитогидродинамические машины переменного тока Одной из разновидностей магнитогидродинамических машин переменного тока являются индукционные насосы для жидких металлов, которые подразделяются на линейные и винтовые [58]. Линейные индукционные насосы родственны линейным асинхронным машинам (см. § 29-4) и делятся на плоские и цилиндрические. Плоские насосы (рис. 29-11) имеют обычно два индуктора, каждый из которых состоит из сердечник-а 1 и многофазной (обычно трехфазной) обмотки 2. Между индукторами находится плоский канал прямоугольного сеченияЗ с жидким металлом. Стенки канала в зависимости от свойств жидкого металла могут быть как металлическими, так и керамическими. Между стенками канала и индукторами в большинстве случаев имеется слой тепловой изоляции. Бегущее магнитное
Рис. 29-Я. Устройство плоского линейного индукционного насоса для жидких металлов поле индукторов наводит в жидком металле токи, и вследствие взаимодействия этих токов с магнитным полем возникают электромагнитные силы, действующие на частицы жидкого металла. В результате развивается напор, и жидкий металл прихоцвт в движение по направлению движения поля с некоторым скольжением относительно его. Цилиндрические насосы имеют канал кольцевого сечения, внутри которого расположен сердечник без обмотки, а снаружи — с обмоткой. Обмотка создает магнитное поле, бегущее вдоль оси канала. Представление о винтов ом индукционном насосе можно получить, если предположить, что ротор асинхронного двигателя заторможен, зубцы ротора вместе с обмоткой срезаны и в зазоре, образовавшемся между внешним и внутренним сердечниками, навит винтовой канал. Индукционные насосы находят применение в исследовательских, транспортных и промышленных установках с ядерными реакторами на быстрых нейтронах, в которых для отвода тевда используются жидкометаллические теплоносители (натрий, кадий, их сплавы и др.). Создаются также разные установки для металлургии и Литейного производства. Все виды индукционных насосов обратимы, и насосы могут работать в режиме асинхронного генератора, если по их каналам за счет внешнего источника прокачивать жидкий металл со скоростью выше скорости движения поля. Магнитогидродинамические генераторы с жидкими металлами, а также с парами жидких металлов имеют перспективы практического применения в разных энергетических установках, в том числе с ядерными реакторами [58]. Предложены различные конструктивные разновидности подобных генераторов. Однако на пути их создания имеются различные трудности, из которых можно отметить проблему разгона жидких металлов за счет содержащейся в них тепловой энергии. § 29-6. Асинхронный преобразователь частоты Асинхронный преобразователь частоты (рис. 29-12) состоит из трехфазной асинхронной машины AM с фазным ротором и соединенного с ней приводного двигателя Д. Одна из обмоток асинхронной машины, например обмотка статора, приключается к первичной сети с частотой flt а вторичная обмотка питает вторичную сеть током частоты скольжения f2 = sfj. Асинхронная машина AM работает либо в тормозном, режиме противовклю-чения, когда s > 1 и f2 > fi. либо в режиме двигателя, когда s < 1 и f2 > fv В двигательном режиме ротор AM вращается в направлении вращения поля, а в тормозном — против направления вращения поля. Генераторный режим работы AM в преобразователях частоты обычно не используется. рели пренебречь потерями, то первичная мощность AM Pi = Pbh> а вторичная мощность, или мощность скольжения, Механическая мощность, развиваемая двигателем Д, Pux = P2-Pi = (s-\)P1. При s > 1, когда fi> f\, приводной двигатель Д работает в режиме двигателя и Рт > 0. При s > 1 двигатель Д работает в действительности в режиме генератора и Рмх < 0. Приводным двигателем Д обычно служит асинхронный или синхронный двигатель. Если величину вторичной частоты необходимо регулировать, то возбуждение первичной обмотки AM частотой производится от вспомогательной синхронной или коллекторной машины с регулируемой частотой. Для этой же цели в качестве двигателя Д можно, использовать машину постоянного тока и регулировать скорость ее вращения. Если /а > fu то Р2 > Pi, и для облегчения работы контактных колец и щеток в качестве первичной обмотки с током частоты ^ используется обмотка ротора. В простейшем случае, когда регулирования величины частоты f2 не требуется, приводной синхронный или асинхронный двигатель Д и первичную обмотку AM можно питать от общей сети с промышленной частотой Д. При этом скорость вращения приводного двигателя и всего агрегата, если в случае использования асинхронного приводного двигателя, пренебречь его скольжением, равна
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 2591; Нарушение авторского права страницы