|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамическая устойчивость синхронной машины
Под динамической устойчивостью синхронной машины понимается ее способность сохранять синхронный режим параллельной работы с сетью при больших и резких возмущениях режима ее работы (короткие замыкания в сети и пр.). Устойчивость работы при этих условиях зависит как от величины возмущения и его длительности, так и от параметров машины, величины, ее предшествующей нагрузки и прочих условий. В большинстве случаев при таких возмущениях возникают колебания или качания ротора с большой амплитудой. Нередко возникающий при таких возмущениях режим работы является неустойчивым и машина выпадает из синхронизма. Вопросы, связанные с динамической устойчивостью, весьма сложны и рассматриваются подробнее в специальных курсах [69—79]. Ниже дается лишь понятие о динамической устойчивости. Э. д. с. за переходным сопротивлением и угловая характеристика мощности при переходных режимах. При резких изменениях режима работы синхронной машины, как и при внезапных коротких замыканиях, в обмотках индуктора возникают добавочные апериодические токи, в результате чего э. д. с. Е, индуктируемая в обмотке якоря, увеличивается и угловая характеристика активной мощности, выражаемая равенством (35 4), изменяется. Как видно из (35-4), при этих условиях машина в состоянии развить большую электрическую мощность. Хотя равенством (35-4) можно пользоваться и при переходных режимах, но это неудобно, так как при этом каждый раз необходимо определять Е с учетом влияния апериодических токов в обмотках индуктора. Поэтому целесообразно такое изменение соотношения (35-4), чтобы в него входили величины, которые при резких изменениях режима остаются неизменными. Как было установлено в гл 34, при резких изменениях режима в обмотках возбуждения и успокоительной возникают апериодические токи, затухающие с постоянными времени T'd и T" d, Так как. период собственных колебаний То = = 0, 5 -*- 2, 0 сек, T'd = 0, 5 ч- 3, 0 сек и T" d = 0, 02 -f- 0, 10 сек, то отсюда следует, что быстро затухающие апериодические токи затухают уже в самом начале первого периода колебаний и поэтому мало влияют на эти колебания. Следовательно, этими токами можно пренебречь. Однако T'd > Т0/2, поэтому медленно затухающие апериодические токи ротора в течение первого полупериода колебаний изменяются мало и в течение этого времени их можно считать постоянными. Изложенное равнозначно предположению, что в течение начального периода колебаний Td — 0 и T'd — оо. З^го соответствует случаю, когда успокоительная обмотка отсутствует, а обмотка возбуждения является сверхпроводящей и поэтому ее потокосцепление постоянно. Сопротивление успокоительной обмотки по поперечной оси г также велико, и поэтому можно положить, что Т" щ — 0. Исходя из этих положений, можно преобразовать равенство (35-4), которое будет действительно для начального периода колебаний при резких изменениях режима работы синхронной машины. Учитывая, что Е = x^if, согласно векторной диаграмме рис. 33-2, для установившегося режима действительно соотношение Оно действительно и для начального периода резкого нарушения режима, если учесть увеличение if в результате возникновения свободной апериодической составляющей этого тока. С другой стороны, условие постоянства потокосцепления обмотки возбуждения ¥ f можно написать в следующем виде: Отсюда и это выражение также действительно как до, так и после резкого нарушений режима. Подставив это значение if в (39-23), находим Обозначим первый ч, лен этого выражения, который вследствие постоянства потокосцепления W. также постоянен, через E'd. С другой стороны, коэффициент второго члена
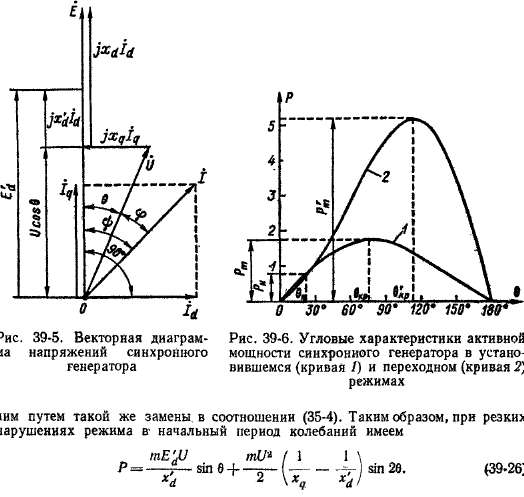
причем E'd— const и соотношение (39-25) также действительно до и после нарушения режима. Величину э. д. с. E'd, называемой э. д.'с. за переходным сопротивлением x'd, можно на#ти, построив векторную диаграмму э. д. с. по данным предшествующего режима (рис. 39-5). Построив на этой диаграмме векторы x'd\d и Е'д, получим видоизмененную диаграмму, отличающуюся от обычной только заменой xd на x'd и Е на E'd. Поэтому и выражение для угловой характеристики полу-
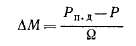
Так как x'd < х, то множитель перед sin 26 в данном случае отрицателен. На рис. 39-6 представлены зависимости Р — f (в) п© (35-4) (кривая У) и по (39-26) (кривая^.2) для явнополюсноймашины с xd+= 1, 1, х # = 0, 75, x'dt = 0, 25 при 1/„ = 1, когда машина в установившемся режиме работала с номинальной нагрузкой (cos фн = 0, 8 (инд.), Pt = 0, 8, б н = 22°27'), чему соответствует Е# = = 1, 87 и E'dt = 1, 14. Из рис. 39-6 следует, что в переходном режиме машина при такой же величине U может нести значительно большую нагрузку, тем большую, чем меньше x'd. Поэтому, чем меньше x'd, тем больше динамическая устойчивость машины. Понятие о динамической устойчивости. Рассмотрим случай (рис. 39-7), когда генератор Г, эквивалентный мощной электростанции, работает через трансформаторы Т1 и Т2 и две параллельные линии передачи Л1 и Л2~~на приемную систему ПС с U= const. При установившемся режиме генератор работает в точке 1 угловой характеристики а рис 39-8, а, определяемой равенством (35-4), причем в данном случае параметры xd, х , х'д включают в себя также индуктивные сопротивления трансформаторов и линий передачи. В точке / мощность генератора Р равна мощности Рп. д, развиваемой турбиной. Допустим теперь, что в результате какой-либо неисправности одна из параллельных линий отключается. В результате такого динамического нарушения режима наступает переходный процесс, в начальной стадии которого величина E'd, определяемая параметрами и другими величинами исходного режима, остается постоянной. При этом будет справедливо соотношение (39-26), но вследствие отключения одной линии x'd увеличится, и в резуль- Рис. 39-7. Схема передачи энергии от синхронного генератора тате этого угловая характеристика переходного режима б рис. 39-8, а может пойти ниже характеристики а, несмотря на отмеченную выше способность машины развивать в переходном режиме при тех же U а х большую мощность. Угол 8 вследствие инерции мгновенно измениться не может, и поэтому непосредственно вслед за отключением линии генератор переходит на работу в точку 2 характеристики б. Так как мощность
Рис. 39-8: Угловые характеристики синхронного генератора в нормальных и аварийных режимах турбины остается постоянной, то при этом Р > Рп. д поэтому ротор будет ускоряться и угол 6 будет расти. В точке 3 наступит равновесие мощностей Р = Рп. д и вращающих моментов, но угловая скорость Q будет больше синхронной Qc, и поэтому в продолжает увеличиваться. Вправо от точки 3 будет Р> Ри. д, поэтому ротор будет тормозиться, Q — уменьшаться и на рис. 39-8, аъ некоторой точке 4 скорость уменьшится до синхронной Q = flc. Положение точки 4 определяется равенством площадей заштрихованных треугольников 123 и 345, т.е S4SS—S^4s (правило площадей). Действительно, длины линий штриховки этих треугольников пропорциональны неуравновешенному синхронизирующему моменту:
и работа dA, совершаемая этим моментом при изменении угла на d&, равная идет на сообщение ротору во время его ускорения добавочной кинетической энергии этой же величины. Поэтому на участке кривой 1—3 ротор получает добавочную кинетическую энергию Здесь мы положили Q « йс так как эти величины мало отличаются друг от друга. Аналогично при торможении ротора на участке 3—4 его кинетическая энергия уменьшается на величину S345 /рйс и поэтому скорость ротора достигнет синхронной, когда S12g -- S& jb- Таким образом, в точке 4 будет Q = Qc, но так как Р > Рп, д, то торможение ротора продолжается, Q становится меньше Qc и 6 уменьшается. При этом режим работы меняется от точки 4 к точке 3, в точке 3 Р = Рп. д и торможение прекращается, но при этом Q < Йс, уменьшение в поэтому будет продолжаться и режим меняется от точки 3 к точке 2. На этом участке Рп. д < Р, поэтому будет происходить ускорение ротора, Q будет расти, но уменьшение 6 будет продолжаться до тех пор, пока в точке 2 не станет Й = Qc. Этим заканчивается первый период колебаний ротора и угла 8 от 8 = 62 до 9 = б4 и обратно до 6 = 82. После этого ротор снова начинает ускоряться, рассмотренный цикл колебаний повторяется и наступают незатухающие колебания ротора с колебаниями 8 в диапазоне 62 — 64. Машина при этом из синхронизма не выпадает, хотя очевидно, что наибольший угол 64 может быть больше 8кр. К заключению о возникновении незатухающих колебаний мы пришли потому, что полагали E'd = const и неизменность в связи с этим характеристики б рис. 39-8, а во время колебаний и, кроме того', пренебрегли успокоительным моментом My, возникающим в результате того, что Q ф Qc. В действительности даже при предположении Е^ = const момент М ^0 и машина развивает мощность также за счет этого момента. Поэтому при движении от точки 2 на рис. 39-8, а к точке 4, когда Q > Qc и s < 0 (режим асинхронного генератора), характеристика Р = / (в) пойдет несколько выше кривой б, ускорение на участке 2—3 будет слабее, а торможение на участке 3—4 — сильнее и в результате угол Bi будет несколько меньше. Далее, при движении от точки 4 к точке 2, когда Q < Qc и s > 0 (режим асинхронного двигателя), характеристика Р = / (8) пойдет ниже кривой б, вследствие этого на участке 4—3 торможение вниз от Q = Qc будет слабее, а на участке 3—2 ускорение будет сильнее и поэтому равенство Q = Qc после первого периода колебаний наступит правее точ'ки 2. Таким образом, под воздействием Му размах, или амплитуда, колебаний будет беспрерывно уменьшаться до тех пор, пока эти колебания не затухнут полностью и при E'd — = const не наступит установившийся режим работы в точке 3, когда Р = Рп, д. Характер колебаний при этом имеет вид кривых на рис. 39-2 и 39-3. На самом деле предположение E'd = const с достаточной точностью действительно только для первого полупериода колебаний, от точки 2 до точки 4 на рис. 39-8, а. В дальнейшем наступает заметное затухание всплеска тока возбуждения Л/., вызванного динамическим нарушением режима, и поэтому E'd будет уменьшаться. Вследствие этого ординаты кривой б будут беспрерывно уменьшаться и при Д(^=0 характеристика Р = / (9) изобразится в виде
кривой в на рис. 39-8, б, которая соответствует равенству (39-4) и расположена ниже кривой а, так как при отключении одной линии на схеме рис. 39-7 х# и х„ увеличатся. Поэтому колебания в действительности происходят вдоль штриховой кривой рис. 39-8, б и установившийся режим наступает в точке 7 кривой в. Колебания при этом также имеют характер, изображенный на рис. 39-2 и 39-3. Однако если, согласно выражению (35-4), установившемуся режиму вместо кривой в рис. 39-8, б будет соответствовать кривая г этого же рисунка, то машина, сохраняя синхронизм в течение первого периода колебаний, выйдет из синхронизма в течение последующих циклов колебаний, так как максимальная развиваемая мощность генератора Рт < Рп. д. Угол 9 при этом будет беспредельно расти (рис. 39-9, а). Может случиться также, что кривая б на рис. 39-8, а будет располагаться настолько низко, что площадь S^ будет больше площади S$jgg фигуры 3465, на-ходящейся над прямой Рп. д = const. Тогда площадь торможения S$ig$ будет не--достаточна и, хотя на участке 346 ротор тормозится, в точке 6 скорость Q будет Рис. 39-9. Графики изменения угла нагрузки при выпадении синхронной машины из синхронизма в процессе колебаний (а) и во время первого полупериода колебаний (б) еще больше синхронной йс и угол 8 в точке 6 будет продолжать увеличиваться. Поэтому изменение режима будет происходить вправо от точки 6, при этом 8 > 8g и Р < Рп. д. В результате вновь наступит ускорение: ротора, угол в будет беспрерывно расти, машина выпадет вд синхронизма и перейдет в возбужденный асинхронный режим работы, когда генераторные режимы будут чередом ваться с двигательными. В этом случае выпадение из синхронизма произойдет в первом цикле колебаний и характер функции 8 — / (Q будет иметь вид рис, 39-9, 6 Выше мы предполагали, что величина тока возбуждения fy0 во время динамических нарушений не регулируется. Ясно, однако, что если в самом начале динамического нарушения i , fl быстро увеличить, то Е и E'd увеличатся и поэтому кривые б/, в, г на рис. 39-9, а и б расположатся выше. Во-первых, при этом уменьшится амплитуда колебаний угла в. I Во-вторых, при достаточно большом увеличении i/e можно избежать выпадения машины из синхронизма. Кроме того, нетрудно заключить также, что целесообразно регулировать, величину tf0 во время колебаний в зависимости от изменения в. При этом, например, во время первого полупериода колебаний, при изменении угла 8 на рис. 39-8, а от 8 = 8j до 9 = В4, надо i/e увеличивать, а во время второго полу* периода, от точки 4 до точки 2, — уменьшать. При этом размах колебаний # уменьшится.
При подобном же регулировании ip в последующих циклах колебаний можно достичь быстрого успокоения колебаний. Подобное же регулирование возбуждения эффективно для уменьшения амплитуды вынужденных колебаний синхронных двигателей и генераторов, соединенных с поршневыми машинами Вследствие малости периода колебаний и быстротечности переходных процессов регулирование if0 также должно совершаться быстро, с помощью автоматических регуляторов тока возбуждения. |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 733; Нарушение авторского права страницы