|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Измерение дальности радиолокационными методами базируется на предположении прямолинейного распространения радиоволн с постоянной скоростью. Следовательно, для измерения дальности до цели достаточно измерить время задержки отраженного от цели сигнала относительно излученного радиолокационного сигнала. Методы измерения дальности подразделяются на амплитудные, частотные и фазовые в зависимости от того, какой из параметров принимаемых радиосигналов используется при измерении времени задержки.
Среди РЛС с амплитудным методом измерения дальности наибольшее распространение получили импульсные станции. Принцип их действия иллюстрируется схемой на рис. 6. Генератор высокой частоты, управляемый импульсным модулятором, генерирует короткие высокочастотные импульсы (зондирующие сигналы) с заданным периодом повторения. Зондирующий сигнал может быть записан следующим образом: uген(t) = U0 cos(ω 0t + ψ 0) при t0 £ t £ t0 + τ и, где t0 – начало отсчета на временной оси, совпадающее с началом импульса; τ и – длительность импульса; U0 – амплитуда колебаний; ψ 0 – начальная фаза колебаний. На время излучения каждого импульса антенна подсоединяется к генератору с помощью антенного переключателя; все остальное время антенна подключена к приемнику. Отраженные от цели сигналы после преобразования в приемнике поступают к выходному устройству, где путем сопоставления моментов излучения зондирующего импульса и приема отраженного измеряется время запаздывания tD. Синхронность процессов в передатчике РЛС и измерительном устройстве обеспечивает синхронизатор. В качестве выходного устройства в импульсной РЛС может быть использована электронно-лучевая трубка с амплитудной или яркостной отметкой. Развертка луча по экрану трубки, как правило, осуществляется с постоянной скоростью. Работа схемы развертки синхронизирована с работой передатчика РЛС (рис. 7, а). Если на экране трубки расстояние между изображениями излученного и отраженного импульсов равно l (рис. 7, б), скорость развертки υ разв, то tD = l/υ разв. (41) В качестве выходного устройства импульсного дальномера может быть использовано и автоматическое счетное устройство.
Рис. 7. К импульсному методу измерения дальности: а – эпюры напряжения, б – изображение на экране индикатора
Для импульсных дальномеров диапазон однозначного измерения дальности определяется периодом следования Тп излучаемых импульсов
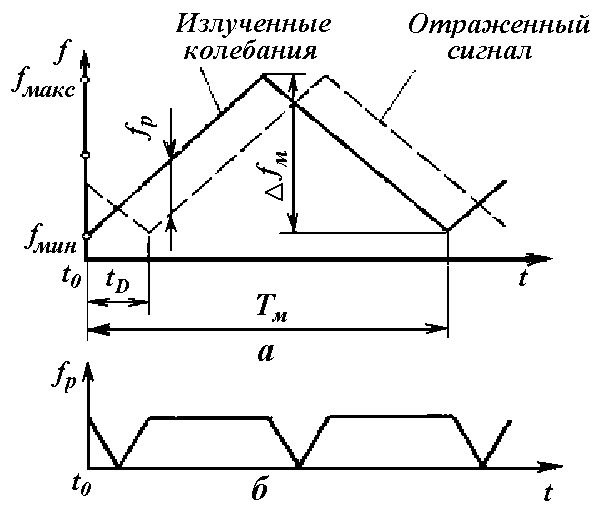
При частотном методе определения дальности РЛС излучает непрерывные колебания с частотной модуляцией. Время распространения определяется путем измерения разности частот излучаемых колебаний и отраженного сигнала. Схема частотной дальномерной РЛС приведена на рис. 8.
Рис. 8. Функциональная схема частотного дальномера
Передатчик формирует частотно-модулированные колебания. На рис.9, a сплошной линией показано изменение частоты излучаемых колебаний по симметричному пилообразному закону. На временных интервалах t0 + nTм £ t £ t0 + (2n+1)Tм/2, uген(t) = U0 cos[2π (fмин t + t 2 Dfм / Tм) + ψ 0], и на интервалах t0+ (2n + 1) Tм/2 £ t £ t0 + (n+ 1) Tм, uген(t) = U0 cos[2π (fмакс t – t 2 Dfм/Tм) + ψ 0], где U0 — амплитуда колебаний; Dfм = fмакс – fмин — максимальное изменение (девиация) частоты; Tм — период модуляции; n = 0, 1, 2, 3…
Рис. 9. К частотному измерению дальности: а — изменение во времени частоты излучаемых и принимаемых колебаний; б — разностная частота Изменение частоты отраженного сигнала характеризуется тем же законом, но смещенным по оси времени на tD (пунктирная линия на рис.9, а). Принятые и излучаемые колебания подаются в смеситель, на выходе которого образуется разностная частота fр. График, характеризующий изменение fр во времени, приведен на рис.9, б. Колебания с разностной частотой подводятся к анализатору частоты. Если время запаздывания tD много меньше периода модуляции Tм, а разностная частота много больше частоты модуляции (fр > > Fм), то с достаточной точностью справедлива формула fр = 2 Dfм tD / Tм. (43) Для дальности до цели соответственно получим D = c Tм fр /4Dfм. (44) Интервал однозначного измерения дальности равен DDодн = cTм /4. (45) К достоинствам частотных дальномеров с непрерывным излучением следует отнести простоту измерения очень малых расстояний и применение передатчиков относительно малой мощности. Основные недостатки рассмотренных РЛС свойственны всем станциям с непрерывным излучением: использование двух антенн, ухудшение чувствительности приема вследствие попадания в приемный тракт излучения передатчика. Специфическим недостатком является требование весьма высокой линейности изменения частоты для одновременного наблюдения за несколькими целями. При наличии только одной цели (например, в радиовысотомерах) может быть применена синусоидальная частотная модуляция uген(t)=U0cos(fизлt + ψ 0) = U0cos[2π f0t+(Dfм/2Fм)sin2π Fмt + ψ 0], где Fм = 1/Tм – частота модуляции; Тм – период модуляции. В этом случае разностная частота изменяется по синусоидальному закону. Среднее значение модуля разностной частоты |fр|ср однозначно связано с дальностью до цели: D = cTм |fр|ср /4D fм. (46) Фазовые методы определения дальности основаны на измерении разности фаз излучаемых волн и принимаемых отраженных сигналов. Схема простейшего фазового дальномера изображена на рис.10.
Рис. 10. Функциональная схема фазового дальномера Излучаются немодулированные незатухающие колебания uген(t) = U0 cos(ω 0t + ψ 0) при 0 £ t < ¥. В фазовом детекторе осуществляется сравнение фаз принятого сигнала и излучаемых колебаний. С учетом фазового сдвига ψ отр волны при отражении от цели и сдвига фаз ψ 0, образующегося при прохождении сигналов по тракту РЛС, результирующая разность фаз указанных колебаний будет равна Dψ = 4π D/λ + ψ отр + ψ 0, (47) где λ – длина волны зондирующего сигнала. Отсюда видно, что разность фаз Dψ зависит от дальности до цели. Этот простейший метод имеет существенный недостаток – очень мал диапазон однозначного измерения дальности: DDодн= λ /4 (48) при условии, что диапазон однозначного измерения фазы равен π. Диапазон однозначного измерения дальности фазовым методом можно резко увеличить, если применять амплитудную модуляцию излучаемых колебаний низкой частотой F = c/Λ ; здесь Λ – длина волны низкочастотных колебаний. В этом случае uген(t) = U0(1 + m cos2π Ft)cos(ω 0 t + ψ 0). Сравнение фаз излученных и принятых колебаний производится на частоте модуляции F. Изменением фазы при отражении от цели на частоте F можно пренебречь. Тогда Dψ = 4π D/Λ = 4π F D/c, (49) D = (c/4π F) Dψ . (50) Диапазон однозначного определения дальности определяется не высокой, а низкой частотой, следовательно, DDодн = Λ /4. (51) Более перспективными следует считать двухчастотные фазовые дальномеры. В подобных РЛС (рис. 11), создаются незатухающие колебания на двух близких частотах f1 и f2, которые излучаются в пространство. Принятые сигналы усиливаются каждый в своем тракте и поступают к первому смесителю. На выходе этого смесителя формируется напряжение разностной частоты uс(f1—f2). Аналогично формируется опорное напряжение разностной частоты uоп(f1—f2). Напряжения uс(t) и uоп(t) подводятся к фазовому детектору, где сравниваются их фазы. Выходное напряжение Uфд фазового детектора позволяет определить дальность до цели. Допуская, что фазовые сдвиги при отражении одинаковы вследствие малой разности частот, определяется дальность до цели D = сDψ P / 4π (f1-f2), (52) где Dψ р — разность фаз опорного напряжения и сигнала на разностной частоте, измеряемая фазовым детектором. Диапазон однозначного измерения дальности равен DDодн = c /4(f1 – f2). (53)
Рис. 11. Функциональная схема двухчастотного фазового дальномера
Общими достоинствами фазовых дальномеров всех типов является относительная простота собственно измерительного устройства и высокая точность измерении. Применительно к двухчастотному методу и методу с амплитудной модуляцией достоинством является большой диапазон однозначного измерения дальности. Фазовым дальномерам свойственны все недостатки, присущие устройствам с непрерывным излучением. Специфическим недостатком фазовых дальномеров является невозможность измерений при одновременном облучении двух и большего числа целей. Задачи 3.1. Каким дальностям до целей соответствует время задержки отраженных сигналов 2 мкс, 5 мс, 1 с, 3 мин? 3.2. Определить время задержки отраженного импульса и максимальную частоту повторения зондирующих импульсов при определении дальности до Луны (среднее расстоянии до Луны равно 385 000 км). 3.3. Частота повторения зондирующих импульсов РЛС равна 1000 Гц. Показать, как расположатся на линии развертки отметки отраженных от целей импульсов, если момент излучения совпадает с началом развертки, длительность прямого хода развертки 700 мкс, а цели находятся на расстоянии соответственно 50 км, 75 км, 90 км и 125 км. 3.4. Максимальная дальность действия самолетной РЛС составляет 70 км. Определить частоту повторения зондирующих импульсов, если известно, что промежуток времени между концом развертки и началом следующей равен 533, 4 мкс. 3.5. Передатчик радиолокационной системы формирует радиоимпульсы длительностью 2 мкс. Максимальная дальность обнаружения РЛС составляет 150 км. Определить суммарное время излучения передатчика РЛС за 8 часов ее работы. 3.6. Длина линии развертки индикатора радиолокационной станции составляет 125 мм. Максимальная дальность действия РЛС 150 км. Определить дальность до цели, если отраженный импульс находится на расстоянии 50 мм от начала линии развертки, а луч перемещается линейно. 3.7. Длительность импульса самолетной радиолокационной системы 2 мкс. Определить, какой участок линии развертки занимает импульс на экране электронно-лучевой трубки, если линия развертки длиной 100 мм соответствует дальности 10 км. 3.8. Максимальная дальность действия радиолокационной станции равна 200 км. Какова скорость движения луча по экрану электронно-лучевой трубки, если длина линии развертки 50 мм? 3.9. В радиолокационной станции используется импульсный метод определения дальности. Определить расстояние до цели, если отметка на экране индикатора дальности находится на расстоянии 40 мм от начала линии развертки, период развертки равен 2000 мкс, развертка прямолинейная и равномерная, рабочий диаметр экрана электронно-лучевой трубки индикатора 100 мм. 3.10. Период повторения зондирующих импульсов РЛС в несколько раз меньше максимального времени задержки отраженных сигналов. Чему равно время задержки отраженных сигналов, измеряемое подобной РЛС? Поясните графически. 3.11. На какой дальности будет находиться отметка от цели на индикаторе кругового обзора, если частота повторения зондирующих импульсов равна 12 кГц, а истинная дальность до цели 18 км? 3.12. Определить абсолютную и относительную ошибки измерения дальности до цели цифровым дальномером (см. рис.12), если цель находится на максимальной дальности обнаружения 120 км. Тактовая частота Fтакт, используемая в дальномере, равна 20 МГц. Объяснить принцип работы цифрового дальномера. Какова должна быть разрядность счетчика дальномера?
Рис. 12. Функциональная схема цифрового дальномера 3.13. На экране индикатора дальности имеются отметки двух целей. Время запаздывания сигналов одной из них превышает период повторения зондирующих импульсов РЛС, и ее дальность отображается неправильно. Изменение частоты повторения зондирующих импульсов в небольших пределах позволяет определить, какая из отметок занимает ложное положение на индикаторе дальности, а какая – правильное. Объясните этот эффект. 3.14. В РЛС используется частотный метод определения дальности. Определить дальность до цели, если разностная частота прямого и отраженного сигнала 7200 Гц, девиация частоты 10 МГц, а частота модуляции 120 Гц. 3.15. Радиовысотомер малых высот имеет два диапазона: 0 – 120 м и 0 – 1200 м. Девиация частоты для первого диапазона равна 40 МГц. Определить девиацию частоты для второго диапазона, если период модуляции не изменяется, а разностные частоты прямого и отраженного сигналов одинаковы для обоих диапазонов. 3.16. В радиовысотомере малых высот используется частотная модуляция. При этом частота сигнала равна 60 МГц, частота модуляции равна 150 Гц. Определить разностную частоту на высоте 100 м. Какой должна быть частота модуляции, чтобы на высоте 1000 м разностная частота осталась бы такой же, как на высоте 100 м? 3.17. Для полета в горной местности на самолете установлена РЛС с частотной модуляцией. Станция служит для предупреждения столкновений с препятствиями. Определить ошибку в показаниях РЛС по дальности, обусловленную эффектом Допплера, если радиальная скорость самолета 1260 км/ч, девиация частоты 2 МГц, период модуляции 0, 01 с, средняя несущая частота 444 МГц. 3.18. Два радиовысотомера характеризуются равными частотами модуляции 8 кГц и девиацией частоты 7 МГц, но разными законами модуляции: первый – пилообразный симметричный, второй – пилообразный несимметричный. Определить однозначно измеряемую высоту первого и второго радиовысотомеров и значения максимальной разностной частоты при положении самолета на максимальной высоте. 3.19. При использовании двухчастотного фазового дальномера разность фаз колебаний, подводимых к фазовому детектору, составляет 36°, дальность до цели равна 40 км. Определить разность частот дальномера. 3.20. Определить применительно к условиям предыдущей задачи максимально возможные значения несущих частот дальномера, если относительная стабильность генераторов несущих частот равна 10-7, а допустимые ошибки измерения дальности не должны превышать 3%. 3.21. Можно ли использовать двухчастотный фазовый дальномер при наличии нескольких целей? 3.22. Определить наивысшую частоту синусоидальной модуляции незатухающих колебаний фазового дальномера, если максимальная дальность до цели равна 150 км.
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 633; Нарушение авторского права страницы
 . (42)
. (42)