
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ.
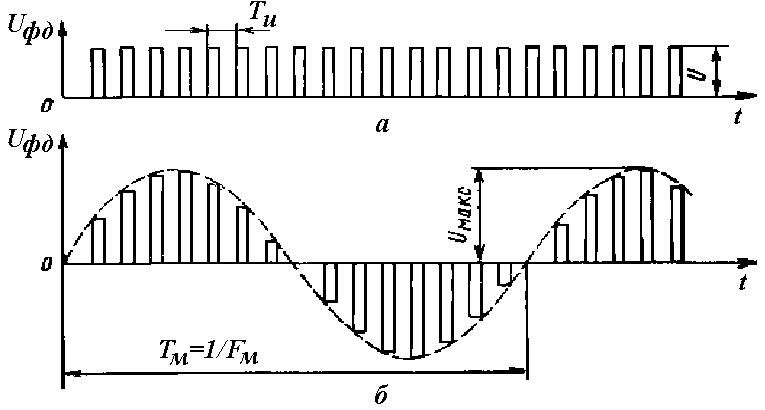
ИЗМЕРЕНИЕ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ ИМПУЛЬСНЫМИ РЛС При обнаружении целей и измерении их координат и параметров движения на фоне местных предметов, гидрометеоров, подстилающей поверхности и умышленных пассивных помех возникает необходимость режекции (фильтрования) мешающих отражений от сигналов движущихся целей. Селекция движущихся целей и измерение радиальной скорости движения цели основаны на использовании эффекта Допплера, заключающегося в том, что частоты излучаемых и принимаемых колебаний различны. Если приемник перемещается относительно источника излучения, то частоты излучаемых f0 и принимаемых fпр колебаний при условии υ < < c связаны соотношением fпр » f0 (1 – υ р/c ), (69) где υ – модуль скорости движения цели; с – скорость света. Величина f0 υ р/c = υ р/λ = Fд (70) представляет собой допплеровское смещение частоты сигнала, а радиальная составляющая скорости цели выражается равенством υ Р = λ Fд. (71) В радиолокации, где чаще всего используются отраженные от цели сигналы, значение допплеровского смещения приближенно удваивается. Допустив, что передатчик и приемник расположены в одной точке, а цель движется со скоростью υ , получим, что частота принимаемых сигналов при υ р < < c равна fпр » f0 (1 - 2υ р/c ), (72) откуда допплеровское смещение частоты равно Fд = 2f0 υ р/c = 2 υ Р/λ , (73) а радиальная скорость υ р = 0, 5Fдλ . (74) На практике сравнение частоты принятых колебаний с частотой опорного генератора производится с помощью фазового детектора, на один вход которого поступает отраженный сигнал с приемника, а на другой вход – опорное напряжение. На выходе фазового детектора формируются видеоимпульсы, амплитуда которых зависит от разности фаз Dψ между напряжением сигнала и опорным напряжением. Если цель неподвижна, то этот фазовый сдвиг постоянен и постоянна амплитуда U импульсов напряжения на выходе фазового детектора (рис.15, а). При движении цели относительно РЛС огибающая видеоимпульсов на выходе фазового детектора оказывается промодулированной некоторой частотой Fм (рис.15, б).
Рис. 15. Видеоимпульсы на выходе фазового детектора: а – при отражениях от местных предметов, б – при отражениях от движущейся цели Для измерения допплеровских частот отраженных сигналов используются когерентные радиолокационные станции, характеризующиеся когерентностью излучаемых колебаний. Колебания называют когерентными, если их начальная фаза либо постоянна, либо изменяется детерминировано. Когерентные РЛС подразделяются на РЛС с внешней и внутренней когерентностью в зависимости от расположения источника опорного сигнала. В РЛС с внешней когерентностью в качестве опорных применяют сигналы, отраженные от пассивной помехи. Опорный сигнал формируется с помощью помехового гетеродина, фазируемого помехой, опережающей полезный сигнал. В РЛС с внутренней когерентностью источником опорного сигнала служит когерентный гетеродин, который может фазироваться сигналом генератора СВЧ (псевдокогерентная РЛС) или служить задающим генератором (истинно когерентные РЛС). Если передатчик РЛС формирует колебание uпер (t) = U0cos (ω 0 t + ψ 0) при 0 £ t < ¥ , то отраженный сигнал на входе приемника uпр (t) = U0cos [ω 0 (t – tD) + ψ 0 + ψ отр], где tD = 2D/c = 2 (D0 – υ рt)/c – время запаздывания отраженной волны; D –текущая дальность до цели; D0 – дальность до цели в момент начала отсчета при t=0; ψ отр – изменение фазы волны при отражении от цели. Два рассмотренных колебания являются когерентными. Разность фаз излучаемых и принимаемых колебаний равна Dψ = - ω 0 tD + ψ отр. Если фазу ψ отр считать постоянной, что справедливо при медленных флуктуациях цели, то разность фаз Dψ окажется детерминированной функцией времени: Dψ = 2 υ P ω 0 t/c + const. (75) Сопоставление двух указанных колебаний позволит выделить допплеровскую частоту Wд = 2υ рω 0/c сигнала и определить радиальную составляющую скорости цели.
Рис. 16. Функциональная схема псевдокогерентной импульсной РЛС
На рис. 16 изображена схема псевдокогерентной импульсной РЛС с фазируемым когерентным гетеродином. Особенность станций такого типа состоит в том, что импульсы высокочастотного генератора некогерентны, т. к. передатчик РЛС формирует зондирующий сигнал, имеющий случайную начальную фазу: uг(t) = Uг cos(ω 0t — ψ гn) при 0 £ tn £ τ и, где tn – время, отсчитываемое от начала n-го периода повторения; ψ гn – фаза n-го импульса, являющаяся величиной случайной, τ и – длительность импульса. Эти импульсы фазируют колебания когерентного гетеродина uкг (t) = Uкгcos(ω кгtn — ψ кгn ), при 0 £ tn £ Tп. Когерентный гетеродин вырабатывает высокостабильные колебания на промежуточной частоте, используемые в качестве опорных для фазового детектора. Длительность существования этих колебаний должна быть равна времени задержки сигналов, отраженных от цели, находящейся на максимальной дальности действия РЛС. Поэтому период повторения зондирующих импульсов в псевдокогерентных РЛС выбирается исходя из условия однозначного измерения дальности
где tзад.мах – максимальное время задержки отраженного сигнала; Dмах – максимальная дальность действия РЛС; c – скорость света. Особенность когерентно-импульсных станций состоит в том, что линейная зависимость между допплеровской частотой Fд и частотой Fм амплитудной модуляции импульсных сигналов на выходе фазового детектора имеет место лишь при выполнении условия Fд £ 0, 5Fп, (77) где Fп – частота следования импульсов РЛС. При возрастании допплеровского смещения Fд частоты сигнала изменение частоты Fм амплитудной модуляции выходных видеоимпульсов происходит по симметричному пилообразному закону (рис.17).
Рис. 17. Зависимость частоты амплитудной модуляции Fм импульсных сигналов на выходе фазового детектора от допплеровского смещения Fд
Таким образом, диапазон однозначно измеряемых, допплеровских частот равен 0, 5Fп. При использовании когерентно-импульсных РЛС движущаяся цель воспринимается как неподвижная, если допплеровская частота кратна частоте следования импульсов РЛС Fд = kFп, (78) где k – целое число. В этом случае амплитуда импульсов на выходе фазового детектора постоянна. Из (73) и (78) следует, что движущаяся цель воспринимается как неподвижная при выполнении следующего равенства (рис. 17): (2υ /λ )cosα = kFп. (79) При заданной скорости υ движения цели значения углов α , для которых справедлива формула (79), называются «слепыми». При заданном направлении движения цели относительно линии «РЛС – цель» формула (79) позволяет определить «слепые» значения скорости полета цели. Наличие «слепых» скоростей и направлений является существенным недостатком импульсно-когерентных РЛС. В связи с ограниченными возможностями когерентно-импульсных РЛС по измерению радиальной скорости обычно их используют для обеспечения решения задач селекции движущихся целей. Примером истинно когерентной импульсной РЛС является станция, схема которой изображена на рис. 18.
Рис. 18. Функциональная схема истинно когерентной импульсной РЛС В станциях такого типа задающий генератор работает на частоте, равной промежуточной частоте fпр приемника. Для создания зондирующего сигнала колебания задающего генератора умножаются по частоте в n раз, усиливаются по мощности и проходят через каскад импульсной модуляции. В качестве гетеродина приемника используется схема умножения частоты задающих колебаний (n-1) раз. В фазовом детекторе в качестве опорных используются колебания задающего генератора. Для обеспечения когерентности задающий генератор должен характеризоваться высокой стабильностью создаваемых колебаний. Особенность истинно когерентных РЛС состоит в том, что когерентность зондирующих импульсов между собой позволяет принимать отраженные от цели сигналы в другом периоде зондирования. Таким образом, появляется возможность выбрать частоту повторения зондирующих импульсов исходя из условия однозначного измерения скорости Fп ³ 2 Fд.мах. (80) Однако в этом случае дальность будет измеряться неоднозначно. Кроме того, при использовании одной антенны, работающей на прием и передачу, возможен эффект «слепых» дальностей. Если отраженный сигнал поступит в антенну в момент излучения зондирующего сигнала, то в связи с тем, что приемник «закрыт» антенным переключателем, отраженный сигнал будет потерян. «Слепые» дальности определяются следующим образом:
где Тп – период повторения зондирующих импульсов; n – номер периода повторения. Истинно когерентные импульсные РЛС применяются при необходимости измерения радиальной скорости цели. Задачи 5.1. Передатчик УКВ станции самолета, летящего со скоростью 900 км/ч по направлению к неподвижному радиоприемнику, настроен на частоту 180 МГц. Определить частоту Допплера. 5.2. Определить радиальную скорость самолета, летящего в направлении РЛС, если несущая частота РЛС составляет 1 ГГц, а частота Допплера, измеренная на выходе приемника, 800 Гц. 5.3. Выбрать параметры РЛС (несущую частоту и период повторения зондирующих импульсов) таким образом, чтобы РЛС была способна однозначно измерять дальность и радиальную скорость одновременно. Максимальная дальность обнаружения должна быть не менее 50 км, а максимальная радиальная скорость цели – не менее 720 км/ч. 5.4. В направлении импульсно-когерентной РЛС движутся три цели с радиальными скоростями 448 км/ч, 648 км/ч и 925 км/ч соответственно. Сколько целей будет наблюдаться, если РЛС характеризуется рабочей длиной волны 3 см и частотой повторения зондирующих импульсов 4 кГц. 5.5. Будет ли наблюдаться цель, движущаяся в направлении РЛС со скоростью 925 км/ч, если импульсно-когерентная РЛС имеет следующие характеристики: частота повторения зондирующих импульсов 4 кГц, рабочая длина волны 4 см. Полоса режекции фильтра Допплера 500 Гц. 5.6. Определить диапазоны радиальных скоростей, полет с которыми позволит ударному самолету скрытно подойти к импульсно-когерентной РЛС со следующими характеристиками: рабочая длина волны 0, 1 м, частота повторения зондирующих импульсов 2 кГц, фильтр Допплера имеет зону режекции 200 Гц. Максимальная скорость ударного самолета 1250 км/ч. 5.7. Определить максимальную радиальную скорость перемещения метеообразований, при которой еще происходит подавление отметок от них импульсно-когерентной РЛС со следующими характеристиками: рабочая длина волны 0, 03 м, частота повторения зондирующих импульсов 4 кГц, фильтр Допплера имеет зону режекции 400 Гц. 5.8. Определите «слепые» направления полета и «слепые» скорости самолета, приближающегося к РЛС с максимальной скоростью 1200 км/ч в секторе углов от 0° до 90°. Характеристики РЛС: частота повторения зондирующих импульсов 800 Гц, рабочая длина волны 8 см. 5.9. Разведывательный самолет совершает полет вокруг импульсно-когерентной РЛС по окружности со скоростью 500 км/ч. Будет ли он наблюдаться на экране индикатора, если рабочая длина волны РЛС 0, 15 м, а частота повторения зондирующих импульсов 5 кГц? 5.10. При использовании наземной когерентно-импульсной РЛС для обнаружения воздушных целей заранее известно, что цели могут перемещаться со «слепыми» скоростями и по «слепым» направлениям. Каким образом можно обеспечить наблюдение всех целей в режиме СДЦ на фоне отражений от местных предметов? 5.11. Определить полосу пропускания и количество фильтров Допплера, если требуется обеспечить разрешающую способность по скорости 30 км/ч для истинно когерентной РЛС. Рабочая длина волны 0, 15 м, максимальная скорость цели равна 1200 км/ч. Имеются ли в данной РЛС «слепые» зоны по дальности, если максимальная дальность обнаружения равна 100 км, длительность зондирующих импульсов 5 мкс? 5.12. Каким способом возможно исключение вредных эффектов «слепых» дальностей в истинно когерентных радиолокационных системах? 5.13. Для защиты РЛС от активных помех используется одновременная работа на двух несущих частотах 3 ГГц и 3, 5 ГГц. Для защиты от пассивных помех используется система СДЦ, функциональная схема которой представлена на рис. 19. Определить, какими характеристиками обладает подобная РЛС (возможность измерения дальности, скорости, наличие «слепых» скоростей и дальностей)? Максимальная дальность обнаружения целей 120 км, максимальная радиальная скорость целей 1500 км/ч. Частота повторения зондирующих импульсов 3 кГц.
Рис. 19. Функциональная схема системы СДЦ двухчастотной РЛС 5.14. Цель приближается к истинно когерентной РЛС. На каких дальностях цели от РЛС отметки от цели будут отсутствовать, если РЛС имеет следующие характеристики: частота повторения зондирующих импульсов 100 кГц, максимальная дальность обнаружения 20 км. 5.15. Максимальная скорость сближения самолетов может достигать 2500 км/ч. Как нужно выбрать частоту повторения зондирующих импульсов самолетной истинно когерентной РЛС для обеспечения однозначной селекции целей по допплеровской частоте? Как это скажется на измерении дальности до цели? Длина волны РЛС равна 4 см. 5.16. При использовании бортовой истинно когерентной РЛС для обнаружения воздушных целей известно, что имеется неоднозначность при измерении дальности до цели. Каким образом из множества отраженных эхо-сигналов можно выделить отметку, несущую информацию об истинной дальности до цели? 5.17. Многофункциональная бортовая самолетная РЛС предназначена для работы в двух режимах: режиме поиска воздушной цели, летящей со скоростью до 3000 км/ч, и поиска наземной цели на дальности до 50 км. Длина волны РЛС равна 3 см. Определите частоты повторения зондирующих импульсов при работе РЛС в данных двух режимах.
|
Последнее изменение этой страницы: 2017-04-12; Просмотров: 491; Нарушение авторского права страницы
 , (76)
, (76)
 , (81)
, (81)