|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Изучение конструкции токарного станка с ЧПУ мод.16К20Ф3Т1.Стр 1 из 2Следующая ⇒
Изучение конструкции токарного станка с ЧПУ мод.16К20Ф3Т1. Цель работы. 1. Изучить устройство и работу основных частей станка. 2. Освоить наладку токарного станка на обработку детали. 3. Составить отчёт о проделанной работе. План работы 1. Ознакомиться с расположением, назначением и устройством основных частей и механизмов станка. 2. Ознакомиться с расположением и назначением основных органов управления станком. 3. Ознакомиться с работой основных частей и механизмов. 4. Получить представление о порядке и последовательности наладки станка. Назначение и основные технические данные станка. Этот станок предназначен для токарной обработки в патроне наружных и внутренних поверхностей деталей типа тел вращения со ступенчатым и криволинейным профилем, включая сверление, зенкерование, развертывание отверстий, а также для нарезания внутренних и наружных крепежных резьб резцом и резьбонарезным инструментом (метчиком, плашкой). Класс точности станка - П (повышенной точности). Станок оснащён оперативным устройством ЧПУ модели 2Р22. Станок применяется в единичном, мелкосерийном и среднесерийном производстве с мелкими повторяющимися партиями деталей. Техническая характеристика станка: Наибольший диаметр обрабатываемой заготовки, мм: при установке над станиной 400 при установке над суппортом 215 Наибольшая длина обработки, мм 900 Диаметр отверстия в шпинделе, мм 53 Частота вращения шпинделя, об/мин 22, 4... 2240 Максимальная рабочая подача, мм/мин: продольная 2000 поперечная 1000 Скорость быстрых перемещений, мм/мин: продольных 6000 поперечных 5000 Дискретность перемещений, мм: продольных 0, 01 поперечных 0, 005 Шаг нарезаемой резьбы, мм 0, 01... 40, 959 Предельные диаметры сверления, мм: по стали 25 по чугуну 28 Число позиций револьверной головки 5 Мощность главного электродвигателя, кВт 11 Конструкция и работа основных механизмов, устройств и систем. Основными механизмами, устройствами и системами станка являются: привод главного движения, привода продольного перемещения каретки и поперечного перемещения суппорта, механизированный трехкулачковый патрон, автоматическая универсальная головка, подвижное ограждение, ограничений перемещений каретки и суппорта, система автоматической смазки, пневмосистема. Привод главного движения. Привод главного движения (рис. 4) включает регулируемый электродвигатель, поликлиновую ременную передачу, шпиндельную бабку и шпиндель. В приводе главного движения используется электродвигатель М1- частотно- регулируемый асинхронный. Возможно использование регулируемого электродвигателя постоянного тока. От электродвигателя М1 посредством поликлиновой передачи (со шкивами диаметрами 105 и 264 мм) вращение передается на вал I шпиндельной бабки, а затем через зубчатые колеса Z = 48 и Z = 48- на вал II. Далее обеспечивается три диапазона частоты вращения шпинделя (n = 22, 4...315; 63...900; 160...2240 об/мин). В пределах каждого диапазона частота вращения регулируется бесступенчато путем изменения частоты вращения электродвигателя М1. Для получения первого диапазона частот вращения движение от вала II через зубчатые колеса z = 45 и z = 45 передается на вал III. затем через зубчатые колеса z = 24 и z = 66 - на вал IV и далее через зубчатые колеса z = 30 и z = 60 - на вал V (шпиндель). Для получения второго диапазона двойной блок зубчатых колес на шпинделе (вал V) вводится в зацепление с колесом z = 30 на валу II, зубчатое колесо z = 45 на валу III выводится из зацепления с колесом z = 45 на валу II. Для получения третьего диапазона колесо z = 48 на шпинделе вводится в зацепление с колесом z = 60 на валу II, а колесо z = 45 на валу III выводится из зацепления с колесом z = 45 на валу II. Зубчатые колеса z = 60 на валах V и VI служат для вращения датчика ВЕ-178 резьбонарезания. Зубчатое колесо z = 60 на валу V- разрезное и служит для выборки зазора в зацеплении в целях предотвращения рассогласования положения шпинделя и датчика.
В качестве привода подач суппорта по оси Х (поперечное перемещение) применяют электродвигатель М2 (регулируемый высокомоментный постоянного тока или частотно-регулируемый асинхронный). От электродвигателя М2 вращение передается через зубчатые колеса z = 40 и z = 40 на шариковый винт-гайку качения с шагом РX.B=5мм; обратная связь по пути осуществляется фотоимпульсным датчиком ВЕ-178. Кинематическая цепь привода подач суппорта по оси Z (продольное перемещение); электродвигатель МЗ - зубчатые колеса z = 50 и z = 50 - шариковый винт-гайка качения с шагом РX.B= 10мм - датчик ВЕ-178. Кинематическая цепь поворота шестипозиционной револьверной головки: асинхронный электродвигатель М4 - зубчатые колеса z = 20 и z = 62 - червячная передача z = 1 и z = 38. Асинхронный электродвигатель М5 приводит во вращение шестеренный насос ВГ11-11А, осуществляющий централизованное смазывание станка. Шпиндельный узел Конструкция шпиндельного узла (рис. 5) в значительной мере определяет эксплуатационные показатели станка, т.е. применяемые режимы резания, достигаемые точность и производительность обработки. Поэтому корпус 7 шпиндельной бабки выполнен в виде жесткой чугунной отливки и надежно закреплен на станине. Зубчатые колеса закалены и прошлифованы по профилю зубьев. Наиболее важной деталью шпиндельной бабки является шпиндель 5, непосредственно воспринимающий усилия резания. Передней опорой служит двухрядный конический роликовый подшипник 4, а задней - однорядный роликовый подшипник 3. Применение в опорах пружин 2, предназначенных для постоянной выборки зазоров в подшипниках, способствует повышению точности и жесткости шпиндельного узла. Подшипники отрегулированы заводом - изготовителем станка, что обеспечивает их эксплуатацию без вмешательства наладчика (кроме случаев ремонта).
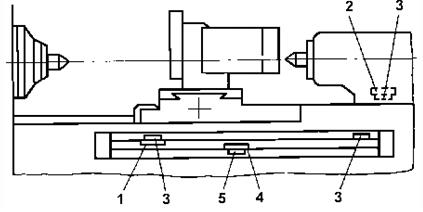
Станция смазки каретки. Станция смазки каретки предназначена для смазки направляющих каретки и станины, а также для подачи масла в гидросистему автоматического перемещения ограждения. Станция смазки С48-14М установлена на правой стороне основания станка и включает в себя (рис.2.11): резервуар 1, насос 2 с приводным электродвигателем, подпорный клапан 3, сетчатый фильтр 4, шланг 5, коллектор, золотник Р3 с электромагнитным управлением и манометром МН. При включении электродвигателя насос подает масло по шлангу в коллектор, находящийся на каретке, и от него ко всем точкам смазки или в гидросистему, что регулируется золотником Р3. Включение насоса станции для смазки направляющих происходит при включении станка и во время работы станка через каждые 45 мин. по команде от устройства ЧПУ. При необходимости можно дополнительно подать масло в направляющие нажатием кнопки 6 ² Смазка направляющих станины² на панели управления станка (см. рис.2, а), масло будет подаваться в течении времени нажатия кнопки. Давление масла в магистрали смазки 0, 1…0, 2 МПа контролируется с помощью манометра МН и регулируется подпорным клапаном 3. Во время перемещения ограждения подача смазки на направляющие отключается золотником Р3.
Рис.2.11. Гидравлическая схема станции смазки каретки: 1 - резервуар, 2 - насос, 3 - редукционный клапан, 4 - фильтр, 5 - трубопровод.
Наладка станка Наладку токарного станка с ЧПУ рекомендуется выполнять следующим образом: 1. В начале смены проверяют основные функции, выполняемые станком. Кроме того, в целях тепловой стабилизации станка и УЧПУ включают вращение шпинделя на средней частоте и питание УЧПУ на 20... 25 мин; при этом прогревают станок. 2. Подбирают согласно карте наладки режущий инструмент и оснастку для крепления обрабатываемой заготовки. Проверяют состояние инструмента. 3. Устанавливают инструмент в соответствующие позиции револьверной головки, указанные в карте наладки. 4. Налаживают кулачки, ограничивающие перемещение суппорта и его нулевое (исходное) положение (рис. 12, 13). 5. Вводят управляющую программу (УП) с пульта УЧПУ с бланка или из кассеты внешней памяти; проверяют УП сначала в покадровом режиме, а затем в автоматическом цикле; наблюдают за правильностью ее осуществления без резания. 6. Закрепляют обрабатываемую заготовку согласно карте наладки. Производят размерную привязку каждого режущего инструмента. 7. Обрабатывают деталь по УП; определяют размеры обрабатываемой детали и вводят необходимые коррекции с пульта управления УЧПУ. При обработке партии деталей необходимо периодически проверять размеры детали и, если нужно, вводить коррекции на инструмент. При обработке первой детали наблюдают за процессом резания (особенно за стружкообразованием и шероховатостью обработанной поверхности); при необходимости вводят коррекции режимов резания (от УЧПУ). Качественная наладка станка во многом определяет производительность труда оператора и наладчика.
Рис.12. Схема расположения кулачков в пазах линейки продольного перемещения: 1 - кулачок для отключения подачи при ходе каретки влево; 2 - кулачок для отключения подачи при ходе каретки вправо; 3 - кулачки аварийного отключения; 4 - кулачок замедления скорости станка; 4 – кулачок выхода в «0» станка; 5 – кулачок для отключения подачи при ходе суппорта от оси шпинделя; 6 – кулачок аварийного останова суппорта при ходе от оси шпинделя.
Рис. 13. Схема расположения кулачков в пазах линейки поперечного перемещения 1 – кулачок аварийного останова суппорта при ходе к оси шпинделя; 2 – кулачок для отключения подачи при ходе суппорта к оси шпинделя; 3– кулачок замедления Применяемые измерительные инструменты и приборы, точность и правильность показаний, которых необходимо проверить в измерительной лаборатории. На точность обработки деталей на токарных станках с ЧПУ влияют следующие факторы: 1. Соответствие станка нормам точности по техническим условиям его изготовления и правильная выверка станка по уровню при монтаже. 2. Правильная регулировка механизмов и устройств станка. 3. Стабильность многократного выхода суппорта в заданные координаты, которую можно проверить посредством индикаторов часового типа. 4. Состояние режущего инструмента (как режущей кромки, так и державки). 5. Стабильная точность индикации револьверной головки, проверяемой индикаторными часами. 6. Точность установки детали в кулачках. 7. Усилие зажима детали (зависящее от характера обработки) и жесткости обрабатываемой детали. Содержание отчета 1. Записать цель лабораторной работы. 2. Указать назначение и область применения станка. 3. Вычертить кинематическую схему приводов главного движения и подачи. 4. Описать принцип действия привода револьверной головки. 5. Описать принцип действия приводов продольной и поперечной подач. 6. Описать конструкцию и принцип действия электромеханического привода зажима обрабатываемых деталей. 7. Выполнить необходимые эскизы (по указанию преподавателя). 8. Ответить на контрольные вопросы. Контрольные вопросы 1. Какой способ регулирования скорости вращения шпинделя применен в станке? 2. Какова структура привода подачи? 3. Как обеспечивается обратная связь по положению при отработке заданного перемещения по координатам X и Z? 4. Как осуществляется выборка зазора в подшипниках шпинделя? 5. Каким образом обеспечивается выборка бокового зазора в зубчатом зацеплении редуктора привода подачи? 6. Как обеспечивается установка нужной инструментальной позиции в револьверной головке? 7. Как обеспечивается необходимое усилие зажима заготовки в патроне станка? 8. Как обеспечивается установка кулачков на диаметр обрабатываемой заготовки? 9. От чего зависит точность обработки на станке?
Изучение конструкции токарного станка с ЧПУ мод.16К20Ф3Т1. Цель работы. 1. Изучить устройство и работу основных частей станка. 2. Освоить наладку токарного станка на обработку детали. 3. Составить отчёт о проделанной работе. План работы 1. Ознакомиться с расположением, назначением и устройством основных частей и механизмов станка. 2. Ознакомиться с расположением и назначением основных органов управления станком. 3. Ознакомиться с работой основных частей и механизмов. 4. Получить представление о порядке и последовательности наладки станка. |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 1735; Нарушение авторского права страницы