
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кинематика кривошипно-шатунного механизма
В автотракторных ДВС в основном используются следующие три типа кривошипно-шатунного механизма (КШМ): центральный (аксиальный), смещенный (дезаксиальный) и механизм с прицепным шатуном (рисунок 11). Комбинируя данные схемы, можно сформировать КШМ как линейного, так и многорядного многоцилиндрового ДВС. Реализация смещенного (дезаксиального) механизма возможна в двух вариантах: в первом случае ось цилиндра не пересекает ось коленчатого вала ДВС, а во втором — ось поршневого пальца смещается относительно оси цилиндра. Кривошипно-шатунный механизм с прицепным шатуном отличается от других схем наличием прицепного шатуна, соединенного пальцем с главным шатуном в его кривошипной головке. Необходимо отметить, что кинематика механизма главного шатуна не отличается от кинематики центрального и смещенного КШМ. Изучение законов движения деталей КШМ проводится с учетом только его структуры и геометрических соотношений между звеньями механизма независимо от сил, вызывающих его движение, и сил трения, при отсутствии зазоров между сопряженными элементами и постоянной угловой скорости кривошипа.
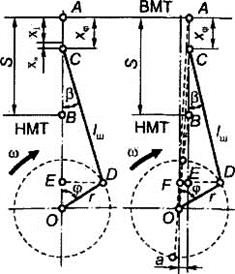
При работе ДВС основные элементы КШМ совершают различные виды перемещений. Поршень движется возвратно-поступательно. Шатун совершает сложное плоскопараллельное движение в плоскости его качания. Кривошип коленчатого вала совершает вращательное движение относительно его оси. Рис. 11 - Кинематические схемы: а— центрального КШМ; б— смещенного КШМ; в — механизма с прицепным шатуном Кинематика центрального и смещенного кривошипно-шатунного механизма. Расчетная кинематическая схема КШМ представлена на рисунке 12 Основными геометрическими параметрами, определяющими законы движения элементов центрального КШМ, являются радиус кривошипа коленчатого вала r и длина шатуна lш. Параметр λ =r/lш является критерием кинематического подобия центрального механизма. При этом для КШМ различных размеров, но с одинаковыми λ законы движения аналогичных элементов подобны. В автотракторных ДВС используются механизмы с λ = 0, 24...0, 31. В смещенных КШМ существует еще один геометрический параметр, влияющий на его кинематику, - величина смещения оси цилиндра (пальца) относительно оси коленчатого вала а. При этом относительное смещение k = а/r является дополнительным (к λ ) критерием кинематического подобия. Таким образом, подобные смещенные КШМ имеют одинаковые λ и k, где k изменяется в пределах 0, 02...0, 1.
а б а – центрального; б – смещенного Рисунок 12 – Расчетные схемы КШМ Как следует из схемы (см. рис. 12), кинематика КШМ полностью описывается, если известны законы изменения по времени следующих параметров: • перемещения поршня x. Начало отсчета (х=0) — положение поршня в верхней мертвой точке (ВМТ); за положительное направление отсчета принято его движение от ВМТ к нижней мертвой точке (НМТ) при вращении кривошипа по часовой стрелке; • угла поворота кривошипа φ. Начало отсчета (φ =0) соответствует положению кривошипа при нахождении поршня в ВМТ; • угла отклонения шатуна от оси цилиндра β (β =0 при φ = 0).
Кинематика кривошипа .Вращательное движение кривошипа коленчатого вала определено, если известны зависимости угла поворота φ, угловой скорости ω и ускорения ε от времени t. При кинематическом анализе КШМ принято делать допущение о постоянстве угловой скорости (частоты вращения) коленчатого вала ω. Тогда φ =ω t, ω =const и ε =0. Угловая скорость и частота вращения кривошипа коленчатого вала п связаны соотношением ω =π n/30. Кинематика поршня. Кинематика возвратно-поступательно движущегося поршня описывается зависимостями его перемещения х, скорости v и ускорения j от угла поворота кривошипа φ. • Перемещение поршня при повороте кривошипа на угол φ определяется как сумма его смещений от поворота кривошипа на угол φ (xI)и от отклонения шатуна на угол β (хII): xφ = r+lш – r cosφ – lш cosβ. (84) Полсе преобразований получим окончательно
• Скорость поршня определяется как первая производная от перемещения поршня по времени, т. е.
что применительно к уравнениям (84) и (85) дает точную vφ =rω sin (φ +β )/cosβ (87) и приближенную зависимости скорости поршня от угла поворота кривошипа. Как видно из (87), максимального значения скорость достигает при φ + β = 90°, когда sin(φ + β ) = 1. При этом ось шатуна перпендикулярна радиусу кривошипа и
Широко применяемая для оценки конструкции ДВС средняя скорость поршня, которая определяется как cn = Sn/30, связана с максимальной скоростью поршня сотношением • Ускорение поршня определяется как первая производная от скорости поршня по времени, что соответствует точно
И приближенно
В современных ДВС j=5000…20000 м/с. Максимальное значение Для смещенного КШМ приближенные зависимости
а – перемещение; б – скорость, в – ускорение Рисунок 13 – Кинематические параметры поршня:
Cравнивая эти зависимости с аналогичными для центального КШМ, можно отметить их отличие в добавочном члене, пропорциональном кλ. Так как для современных двигателей kλ =0, 01...0, 05, то его влияние на кинематику механизма невелико и на практике им обычно пренебрегают. Кинематика шатуна. Сложное плоскопараллельное движение шатуна складывается из перемещения его верхней головки с кинематическими параметрами поршня и его нижней кривошипной головки с параметрами конца кривошипа. Кроме того, шатун совершает вращательное (качательное) движение относительно точки сочленения шатуна с поршнем. • Угловое перемещение шатуна β =arcsin(λ sinφ ). Экстремальные значения β = ±arcsinλ имеют место при φ = 90 и 270°. В автотракторных двигателях β max= ± (12...18°). • Угловая скорость качания шатуна ω ш=dβ шldt или ω ш= λ ω cos φ /сos β ш. Экстремальные значения ω ш = ±λ ω наблюдаются при ω ш = 0 и 180°. • Угловое ускорение шатуна
Экстремальные значения ε ш= ±λ ω 2/ Кинематика кривошипно-шатунного механизма с прицепным шатуном. Кривошипный механизм с прицепным шатуном (рисунок 14) представляет собой совокупность двух механизмов: обычного КШМ с главным шатуном АВ длиной lш, опирающимся на кривошип ОВ радиусом r; механизма с прицепным шатуном АпВп, шарнирно соединенным в точке подвеса Вп, с нижней головкой главного шатуна на расстоянии rп=ВВпот центра шатунной шейки (rп – радиус подвеса) под углом λ 1к оси главного шатуна. Очевидно, что механизм с главным шатуном кинематически тождествен обычному трехшарнирному КШМ, в то время как механизм с прицепным шатуном (МПШ) является механизмом четырехшарнирным, что предопределяет своеобразие его кинематики. Перемещение поршня в МПШ в принципе может быть описано тем же уравнением, что и в случае обычного КШМ. Если мысленно на отрезке ОВпразместить кривошип (штриховая линия на рисунке 14; в дальнейшем такой кривошип называется фиктивным), то смещение поршня xп=ρ [1 - cos φ п)+(λ п/4) (1 - cos 2φ п)]. Здесь ρ = ОВп— радиус «фиктивного» кривошипа; φ п — угол поворота «фиктивного» кривошипа относительно ВМТ в МПШ. Как следует из рисунка 15, φ п=(360° - γ ) + φ + α, где φ – угол поворота кривошипа в КШМ с главным шатуном; γ – угол между осями цилиндров левого и правого рядов; α – угол между осями действительного (ОВ) и «фиктивного» (ОВп) кривошипов; λ п=ρ /lп; lп = АпВп– длина прицепного шатуна. Радиус «фиктивного» кривошипа может быть определен по формуле: ρ = Величина угла α определяется по теореме синусов из треугольника ОВВп: α =arcsin {(rп /ρ )sin [γ 1 – (φ +β )]}. Скорость и ускорение поршня в МПШ находятся по известным зависимостям: vn=(Δ xп/Δ φ )ω и jп = (Δ vп /Δ φ )ω, где Δ xп и Δ vп— приращения соответственно перемещения и скорости поршня на угловом интервале Δ φ. На рисунке 15 показана траектория точки подвеса Вппри повороте кривошипа в пределах углов φ =0...360°.
|
Последнее изменение этой страницы: 2017-05-04; Просмотров: 3648; Нарушение авторского права страницы

 (85)
(85) (86)
(86) (88)
(88) (89)
(89) и для используемых λ равна 1, 62...1, 64.
и для используемых λ равна 1, 62...1, 64. (90)
(90) (91)
(91) имеет место при φ =0 и 360º. Угол φ =180º для механизмов с λ < 0, 25 соответствует минимальному значению ускорения
имеет место при φ =0 и 360º. Угол φ =180º для механизмов с λ < 0, 25 соответствует минимальному значению ускорения  . Если λ > 0, 25, то имеется еще два экстремума
. Если λ > 0, 25, то имеется еще два экстремума  при
при  . Графическая интерпретация уравнений перемещения, скорости и ускорения поршня приведена на рисунке 13.
. Графическая интерпретация уравнений перемещения, скорости и ускорения поршня приведена на рисунке 13. ,
,  и
и  имеют вид
имеют вид (92)
(92) , (93)
, (93) . (94)
. (94)
 (95)
(95) достигаются при φ = 90 и 270°.
достигаются при φ = 90 и 270°. .
.