
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамика кривошипно-шатунного механизма ⇐ ПредыдущаяСтр 9 из 9
При работе двигателя в КШМ действуют следующие основные силовые факторы: силы давления газов, силы инерции движущихся масс механизма, силы трения и момент полезного сопротивления. При динамическом анализе КШМ силами трения обычно пренебрегают. 8.2.1. Силы давления газов Сила давления газов возникает в результате осуществления в цилиндре двигателя рабочего цикла. Эта сила действует на поршень, и ее значение определяется как произведение перепада давления на поршне на его площадь: Pг = (pг–pо)Fп. Здесь рг – давление в цилиндре двигателя над поршнем; ро– давление в картере; Fп– площадь дна поршня. Для оценки динамической нагруженности элементов КШМ важное значение имеет зависимость силы Ргот времени. Ее обычно получают перестроением индикаторной диаграммы из координат р–V вкоординаты р—φ посредством определения Vφ =xφ Fп с использованием зависимости (84) или графических методов. Сила давления газов, действующая на поршень, нагружает подвижные элементы КШМ, передается на коренные опоры картера и уравновешивается внутри двигателя за счет упругой деформации элементов, формирующих внутрицилиндровое пространство, силами Рги Р/г, действующими на головку цилиндра и на поршень. Эти силы не передаются на опоры двигателя и не вызывают его неуравновешенности. 8.2.2. Силы инерции движущихся масс КШМ Реальный КШМ представляет собой систему с распределенными параметрами, элементы которой движутся неравномерно, что вызывает появление инерционных сил. В инженерной практике для анализа динамики КШМ широко используют динамически эквивалентные ему системы с сосредоточенными параметрами, синтезируемые на основе метода замещающих масс. Критерием эквивалентности является равенство в любой фазе рабочего цикла совокупных кинетических энергий эквивалентной модели и замещаемого ею механизма. Методика синтеза модели, эквивалентной КШМ, базируется на замене его элементов системой масс, связанных между собой невесомыми абсолютно жесткими связями. • Детали поршневой группы совершают прямолинейное возвратно-поступательное движение вдоль оси цилиндра и при анализе ее инерционных свойств могут быть замещены равной им массой mп, сосредоточенной в центре масс, положение которого практически совпадает с осью поршневого пальца. Кинематика этой точки описывается законами движения поршня, вследствие чего сила инерции поршня Pjп = –mпj, где j –ускорение центра масс, равное ускорению поршня.
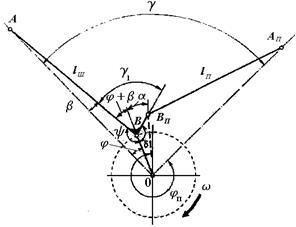
Рисунок 14 – Схема кривошипного механизма V-образного двигателя с прицепным шатуном
Рисунок 15 – Траектории точек подвеса главного и прицепного шатунов • Кривошип коленчатого вала совершает равномерное вращательное движение. Конструктивно он состоит из совокупности двух половин коренных шеек, двух щек и шатунной шейки. Инерционные свойства кривошипа описываются суммой центробежных сил элементов, центры масс которых не лежат на оси его вращения (щеки и шатунная шейка): Кк=Кrш.ш+2Кrщ=тш.шrω 2+2тщρ щω 2, где Кrш.ш Кrщи r, ρ щ— центробежные силы и расстояния от оси вращения до центров масс соответственно шатунной шейки и щеки, mш.ш и mщ— массы соответственно шатунной шейки и щеки. • Элементы шатунной группы совершают сложное плоскопараллельное движение, которое может быть представлено как совокупность поступательного движения с кинематическими параметрами центра масс и вращательного движения вокруг оси, проходящей через центр масс перпендикулярно плоскости качания шатуна. В связи с этим ее инерционные свойства описываются двумя параметрами — инерционными силой и моментом. Эквивалентная система, замещающая КШМ, представляет собой систему двух жестко связанных между собой масс: • массу, сосредоточенную на оси пальца и совершающую возвратно-поступательное движение вдоль оси цилиндра с кинематическими параметрами поршня, mj=mп+mш.п; • массу, расположенную на оси шатунной шейки и совершающую вращательное движение вокруг оси коленчатого вала, тr=тк+тш.к(для V-образных ДВС с двумя шатунами, расположенными на одной шатунной шейке коленчатого вала, тr= mк+mш.к. В соответствии с принятой моделью КШМ масса mj вызывает силу инерции Pj= —mjj, а масса тr создает центробежную силу инерции Кr= — аш.штr=тrrω 2. Сила инерции Pj уравновешивается реакциями опор, на которые установлен двигатель, Будучи переменной по величине и направлению, она, если не предусмотреть специальных мероприятий по ее уравновешиванию, может быть причиной внешней неуравновешенности двигателя, как это показано на рисунке 16, а. При анализе динамики ДВС и особенно его уравновешенности с учетом полученной ранее зависимости ускорения j от угла поворота кривошипа φ силу инерции Рj удобно представлять в виде суммы двух гармонических функций, которые отличаются амплитудой и скоростью изменения аргумента и называются силами инерции первого (PjI) и второго (PjII) порядка: Pj= – mjrω 2( cos φ +λ cos2φ ) = С cos φ + λ C cos 2φ =PfI+PjII, где С = –mjrω 2. Центробежная сила инерции Kr=mrrω 2 вращающихся масс КШМ представляет собой постоянный по величине вектор, направленный от центра вращения по радиусу кривошипа. Сила Кr передается на опоры двигателя, вызывая переменные по величине реакции (рисунок 16, б). Таким образом, сила Кr как и сила Рj, может являться причиной неуравновешенности ДВС.
а – сила Pj; сила Кr; Кх=Kr cos φ = Kr cos (ω t); Ку = Kr sin φ = Kr sin (ω t) Рис. 16 - Воздействие сил инерции на опоры двигателя:
|
Последнее изменение этой страницы: 2017-05-04; Просмотров: 1203; Нарушение авторского права страницы

