
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Распределение плотности вероятности сенсорных событий
При определении нижних абсолютных порогов чувствительности (см. раздел 1) испытуемый в каждой отдельной стимульной пробе должен принимать решение – был в интервале наблюдения предъявлен стимул или нет. Если испытуемый считает, что стимул был, он дает ответ «ДА», если полагает, что стимула не было, ответ – «НЕТ». При новом подходе внешне ситуация остается такой же. Однако, согласно ее трактовке в рамках ТОС, полагается, что в интервале наблюдения испытуемый имеет дело с сенсорным событием s, причину появления которого он не знает – его задачей является принятие решения о том, чем вызвано это сенсорное событие. Вводимое здесь новое понятие « сенсорное событие s » может трактоваться как некоторый « прообраз» стимула – т.е. то, что возникает до появления сенсорного образа в его привычном понимании. Основные допущения, на которые опирается ТОС в применении к психофизике, следующие:
1. Причиной возникновения сенсорного события s может быть либо действие на сенсорную систему стимула s, либо что-то другое, не связанное со стимулом – например, собственный “внутренний“ шум сенсорной системы (“нейронный шум”). 2. Испытуемый не знает достоверно, чем вызвано появление сенсорного события s – стимулом S или действием других факторов, например “шума” n. 3. Испытуемый должен принять в этих условиях наиболее правильное решение.
Таким образом, данная ситуация по своим признакам полностью соответствует той, которая описывалась в предыдущем разделе 2 – отсутствие достаточной информации для принятия детерминистического решения, необходимость принятия в ситуации неопределенности наилучшего решения – то есть испытуемый должен действовать в соответствии с правилами теории статистических решений. При этом аналогом величины, которую в предыдущем разделе называли апостериорной информацией ej, будет сенсорное событие s. Результатом положительного исхода при принятии решения, (т.е. испытуемый принимает решение: «Да. Стимул был»), является переход сенсорного события в категорию «сенсорный образ стимула - Š ». Если же решение отрицательно: «Нет. Стимула не было», - сенсорный образ не возникает. То есть результатом принятия решения является качественное изменение субъективного статуса сенсорного события - оно становится субъективным образом, образом ощущения.
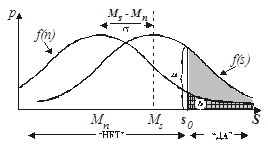
При измерении разностной чувствительности, когда испытуемый должен установить идентичность или неидентичность двух (или более) стимулов, процесс принятия решения строится следующим образом. В каждой стимульной пробе испытуемому предъявляется два стимула – J1 и J2 , вследстие воздействия которых сенсорная система формирует их сенсорные образы Š 1 и Š 2. Значение каждого из этих сенсорных образов является случайной величиной, что обусловлено стохастичностью функционирования сенсорной системы, о чем уже говорилось ранее. Любое возможное в этих условиях значение величины сенсорного образа Š может быть вызвано любым значением действующего стимула J . Это означает, что образ Š 1 может быть вызван воздействием как стимула J1 , так и стимула J2 , и также образ Š 2 может быть вызван воздействием как стимула J2 , так и стимула J1 . Соответственно принятие решения испытуемым в этой ситуации будет заключаться в том, чтобы правильно выбрать один из двух вариантов: а) различие образов, выражаемое значением случайной величины Δ Š = Š 2 ─ Š 1, есть следствие стохастичности функционирования сенсорной системы; б) различие образов (величина Δ Š ) обусловлено различием величин действующих стимулов J1 и J2 . В ситуации оценки абсолютной чувствительности, в соответствии с вышеизложенным, при принятии решения испытуемый должен все множество возможных сенсорных событий s, образующих сенсорную ось s, разбить на два части (см. рис. 6, где p -вероятность возникновения сенсорного события s ). Точку разбиения на сенсорной оси обозначим как s0 и в дальнейшем будем называть сенсорным порогом принятия решения. Значения s большие s0 по величине в результате принятия решения определяются как вызванные воздействием стимула (ответ испытуемого: «ДА! Стимул был.»), меньшие – как вызванные другими факторами - «внутренним» или «собственным» шумом n (ответ испытуемого: «нет! Стимула не было.») Функции, изображенные на рис.6, определяются как:
f(n) - плотность вероятности возникновения сенсорного события без воздействия стимула; f(s) - плотность вероятности возникновения сенсорного события при наличии стимула.
Рис. 6. Распределения плотностей вероятностей сенсорных событий (пояснения см. в тексте)
При этом полагается, что сенсорные события могут принимать какие угодно значения – т.е. ось сенсорных событий непрерывна. Это допущение является в определенной мере условным, поскольку идеализирует и упрощает ситуацию. Однако именно это позволяет выделить главное, что позволит дальнейшее описание теории проводить по отношению к некоему “идеальному наблюдателю” (“идеальному испытуемому”), действующему в “идеальных” условиях. Весьма интересным является предположение о том, что принятие решения о наличии или отсутствии стимула может быть связано с последующим осознанием или неосознанием сенсорного события s . В этом случае все множество сенсорных событий s может рассматриваться как содержание неосознаваемой субсенсорной области психического, которое может превратиться в содержание актуального сознания, если в результате принятия решения какая-то их (сенсорных событий) часть переводится в категорию «сенсорный образ Š ».
Правило принятия решения Правило принятия решения, которым будет руководствоваться испытуемый в этом случае, будет достаточно простым:
если sj > s0 , то принимается решение «Да, стимул был» (гипотеза h1); если sj < s0 , то принимается решение «Нет, стимула не было» (гипотеза h2).
Для того, чтобы субъект мог дать один из этих ответов, необходимо определить то критическое значение s0, которое разделит всё множество значений s на две области, соответствующие ответам ² ДА² и ² НЕТ². Процедура определения s 0 задаётся теми закономерностями процесса принятия решения, которые рассмотрели ранее в разделе 2. Однако теперь рассматриваются уже не дискретные величины апостериорных вероятностей p(ej /h1) и p(ej /h2), а функции распределения плотности вероятности возникновения сенсорного события при наличии (или без) стимула в пробе - f(s) и f(n) соответственно (см. рис.6). А взамен отношения правдоподобия λ используется функция отношения правдоподобия f(λ ), которая для случая нормального закона распределения функций f(s) и f(n) является монотонно возрастающей:
а ее общий вид представлен на рис.7.
Рис.7. Общий вид функции отношения правдоподобия
Порог принятия решения λ 0 определяется субъектом в полном соответствии с правилами, описанными ранее в разделе 2 - исходя из имеющихся значений априорных вероятностей qs, qn и стоимостей решений C. Затем, через функцию отношения правдоподобия f(λ ) определяется пороговое значение s0 , которое и позволяет принимать решение о переводе сенсорного события в категорию «сенсорный образ Š ». Соответственно четырём типам исходов (см. таблицу 4), можно определить их вероятности, если определены λ 0 и s0:
(далее будем обозначать как Pобн);
Графически эти четыре вероятности представляют собой площади под графиками функций f(s) и f(n), изображенными на рис.6., слева и справа от критической точки s0. На рис.6 заштрихованы площади, соответствующие Pобн и Pлт. При этом: Pобн+ Pпроп =1, (17а) Pлт + Pотр =1. (17b)
Учитывая эти соотношения, очевидно, что для полного описания ситуации достаточно знать одну величину из первого равенства ( Pобн или Pпроп ), и одну - из второго ( Pлт или Pотр ).
|
Последнее изменение этой страницы: 2017-05-05; Просмотров: 342; Нарушение авторского права страницы

 , (15)
, (15)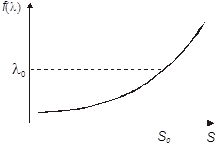
 - вероятность правильного обнаружения стимула (16a)
- вероятность правильного обнаружения стимула (16a) - вероятность пропуска стимула ( Pпроп ); (16b)
- вероятность пропуска стимула ( Pпроп ); (16b) - вероятность ложной тревоги ( Pлт ); (16с)
- вероятность ложной тревоги ( Pлт ); (16с) - вероятность правильного отрицания ( Pотр ). (16d)
- вероятность правильного отрицания ( Pотр ). (16d)