|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Анализ существующих положений теории оценки параметров сигналовСтр 1 из 10Следующая ⇒
Введение Организация информационных потоков и способы их обработки в системах связи за последние 50 лет претерпели значительные изменения. Для современных связных систем характерен постоянный увеличение объема принимаемой и обрабатываемой ими информации. В этих условиях проблема мониторинга радиообстановки становится все более актуальной. Особенности функционирования современных систем радиосвязи показывают, что эффективность их контроля с помощью систем радиомониторинга определяется как оперативностью обнаружения факта излучения и вскрытия модуляционных параметров сигнала, так и способностью технических средств обрабатывать весь спектр требуемых видов радиосигналов и отвечать общим требованиям алгоритма организации мониторинга [1]. Для систем радиомониторинга характерен класс практических задач, при решении которых использование оптимальных методов приема и обработки сигналов оказывается затруднительным из-за априорной неопределенности значения несущей частоты, вида модуляции, скорости манипуляции, характера демодулированного сигнала, а также из-за неоптимальных условий приема. При этом в процессе радиоконтроля в общем случае необходимо выполнять следующие операции: поиск и обнаружение радиоизлучений с априорно неизвестными параметрами, определение вида и параметров их модуляции, измерение побочных составляющих радиоизлучений с целью оценки индивидуальных параметров радиопередатчика, демодуляция и декодирование сигналов и др. Одной из главных проблем систем радиомониторинга является то, что характерной особенностью современных систем и сетей связи является использование различных методов адаптации, в результате применения которых в каналах связи по различным причинам могут изменяться вид модуляции и параметры используемых сигналов в течение одного и того же сеанса связи. Следует также отметить, что в условиях неполных априорных сведений о параметрах принимаемого сигнала решение ряда задач его обработки, таких как установка полос основной селекции приемника, настройка демодулятора, принятие демодулятором правильного решения о передаваемом значении модуляционного параметра, требует возможно более точного знания модуляционной структуры поступающего из эфира сигнала. Эти факторы обуславливают необходимость включения в тракты обработки исследуемых сигналов специализированных систем автоматического определения параметров и видов модуляции принимаемых сигналов. В данной работе рассматривается общее построение системы радиомониторинга, а также разрабатывается устройство автоматического определения эффективных оценок периода сигнала, наблюдаемого на фоне стационарного гауссовского шума, на основе статистики времен пересечения наблюдаемым процессом заданного уровня в условиях априорной неопределенности относительно не измеряемых параметров сигнала и шума, а также расчет числовых характеристик полученных оценок. Во многих практических задачах возникает необходимость оценивания периода сигнала, наблюдаемого на фоне аддитивного стационарного гауссовского шума. К числу таких задач относятся, например, задачи измерения низкой частоты сигнала с помощью измерителя временных интервалов [1]. Оптимальное оценивание параметров сигнала, наблюдаемого на фоне шума, предполагает формирование условного отношения правдоподобия и отыскание в области значений параметров сигнала и шума его максимального значения [2]. При высоком уровне априорной неопределенности относительно параметров сигнала и шума оптимальный измеритель представляет собой многоканальную структуру, число каналов которой зависит от числа неизвестных параметров и необходимой точности оценки. При этом техническая реализация оптимального измерителя может представлять собой весьма сложную задачу [2]. При больших отношениях сигнал/шум, что характерно, например, для задач измерения и контроля параметров радиоаппаратуры и сигналов, используют более простые оценки, основанные на измерении временных интервалов между соседними пересечениями процессом заданного уровня [1, 3]. Применительно к задаче оценивания периода сигнала наибольшее распространение получили цифровые методы измерений, основанные на подсчете числа квантующих импульсов в течение одного или нескольких периодов [1]. Основным ограничением по точности таких измерений является погрешность, обусловленная действием шумов. При необходимости повысить точность оценки увеличивают число периодов сигнала, по которому производится оценка. Достоинством данных оценок является их устойчивость в условиях априорной неопределенности относительно неизмеряемых параметров сигнала и шума, недостатком необходимость формирования исходной выборки большого объема. Тем не менее используя те же исходные данные в виде статистики времен пересечения заданного уровня, можно получить более эффективные оценки периода сигнала, требующие меньшего объема исходной выборки. Цель настоящей работы - синтез эффективных оценок периода сигнала, наблюдаемого на фоне стационарного гауссовского шума, на основе статистики времен пересечения наблюдаемым процессом заданного уровня в условиях априорной неопределенности относительно неизмеряемых параметров сигнала и шума, а также расчет числовых характеристик полученных оценок.
1. Анализ технического задания Постановка задачи В процессе выполнения работы требуется спроектировать аппаратно программный комплекс обработки радиосигналов систем связи, работающий в условиях большой априорной неопределенности. Обнаружение должно осуществляться для следующих параметров сигнала: - Диапазон контролируемых частот (З-ЗО) МГц. - Вероятность энергетического обнаружения информационного сигнала s(t )Р не хуже 0, 9. - Динамический диапазон на входе системы радиомониторинга - -Д< 140 дБ. - Вид модели на выходе линейного тракта системы радиомониторинга -двухкомпонентная. - Вид модуляции- дискретно-модулированный сигнал. - Расстройка сигнала на выходе линейного приемника- (215+ 1)кГц. - Погрешность определения скорости манипуляции - не хуже 10%. Постоянное появление новых систем и средств радиосвязи ставит перед разработчиками аппаратуры связи и мониторинга достаточно сложные технические задачи. Кажущаяся открытость систем радиосвязи и возможность относительно свободного приобретения технических средств, применяемых в интересующей коммуникационной системе, могут ввести в заблуждение о простоте и доступности радиоконтроля. Однако прием и обработка сигналов, используемых в современных системах наземной радиосвязи, значительно затруднены вследствие [1]: - возможности использования в радиообмене одним корреспондентом большого количества частот; - применения в одной системе связи сигналов с различными видами и параметрами модуляции и возможности изменения их значений в ходе сеанса связи; - разнообразного характера передаваемой информации — от речевых сообщений на аналоговом уровне до межкомпьютерного обмена на цифровом; - сокращения продолжительности сеансов связи за счет автоматизации процессов организации радиоканала и увеличения скорости передачи информации; - уменьшения уровня сигналов и, как следствие, соотношения сигнала/шум на входе средств радиоприема; - большого числа различных видов конфигураций сетей связи, динамического изменения их структуры и возможности их сопряжения с другими системами. Особенности функционирования современных систем радиосвязи, структура используемых в них сигналов и технических возможностей неавтоматизированных средств обработки показывают, что применение последних не позволяет эффективно решать задачи радиоконтроля [4]. Это объясняется большими временными затратами, вызванными необходимостью использования ручного труда оператора в процессе определения технических параметров сигнала и настройки обрабатывающей аппаратуры; необходимостью задействования большого числа различных аппаратных средств и нескольких операторов при контроле систем связи, использующих при радиообмене большое количество частот и ряд различных видов модуляции; отсутствием штатных образцов техники для доступа к ряду современных радиосигналов со сложными видами модуляции и кодирования. В этих условиях необходимость повышения технических возможностей комплексов радиоприема и мониторинга предполагает разработку и внедрение новых технических средств, адекватных по своим параметрам контролируемым системам связи. В целом состав аппаратуры таких комплексов должен обеспечить решение задач радиоприема, обнаружения, анализа, демодуляции, декодирования и обработки принятых сообщений. Радиоконтроль является областью радиоэлектроники, связанной с исследованием физических объектов и явлений на основе использования их электромагнитных излучений. Решение проблем радиоконтроля осуществляется на основе первичной, вторичной и третичной обработки информации. Наиболее важными этапами первичной обработки информации являются задачи обнаружения и оценивания параметров сигналов, которые должны решаться в условиях отсутствия априорной информации не только о параметрах, но и о виде сигналов, а также разнообразных помеховых ситуациях. Специфика исходных данных радиоконтроля в большинстве случаев соответствует ситуациям, когда величина коэффициента фильтрации превышает единицу (Δ fnT » 1), где Δ fn - полоса пропускания линейного входного тракта приемника, Т - постоянная усреднения выходного эффекта. Организация радиоприема сигналов систем наземной радиосвязи обычно предусматривает ряд следующих типичных действий оператора в процессе поиска либо контроля рабочих частот источников радиоизлучений: - управление частотой настройки радиоприемника с целью обнаружения требуемого сигнала; - определение (подтверждение) технических параметров обнаруженного сигнала; - настройка аппаратуры и обработка сигнала; - занесение или проверка параметров сигнала и источника радиоизлучений в соответствующих формах учета результатов работы; - в случае невозможности проведения в процессе приема сигнала вышеперечисленных операций в реальном масштабе времени осуществление записи обнаруженного сигнала с целью проведения операций детального технического или информационного анализа в отложенном режиме. К числу важнейших параметров, подлежащих оценке, относится скорость передачи информации.
Ковариационный метод Основной подход к определению пределов суммирования заключается в том, что фиксируется интервал, на котором вычисляется средний квадрат погрешности, и рассматривается влияние этого обстоятельства на вычисление φ n(I, k). Другими словами, если определить
то φ n(I, k) выражается формулой [6]
Изменив индекс суммирования, (1.2) можно выразить в виде
или
Полученные уравнения кажутся очень похожими на (1.136), однако они имеют иные пределы суммирования. В (1.13) используется значение сигнала sn(m) вне интервала 0
обладает свойствами, которые значительно влияют на метод решения и свойства получаемого оптимального предсказателя. В матричной форме система уравнений имеет вид
В этом случае, поскольку
Метод анализа, основанный на изложенном выше способе вычисления Автокорреляционный метод Один из способов определения пределов в основан на предположении, что сигнал равен нулю вне интервала 0 sn(m) = s(m + n) * w(m), (1.17) где w(m) - окно конечной длительности (например, окно Хемминга), равное нулю вне интервала. Поскольку sn(m) равно нулю вне интервала 0
можно выразить в виде
Легко видеть, что в данном случае
где
Поскольку
Таким образом, (1.22) можно представить в виде [7]
Аналогично минимальный средний квадрат погрешности предсказания
2. Обоснование структурной схемы системы радиомониторинга, определение требований к структурным элементам Задачи родиомониторинга Радиомониторинг находит применение во многих областях. Это и контроль общей электромагнитной обстановки органами эфирного надзора, и обнаружение несанкционированных передатчиков, работающих в пределах закрытой зоны, например воинской части, аэропорта, здания с режимом секретности и так далее, вплоть до отдельного помещения — комнаты переговоров, кабинета. С технической точки зрения задача радиомониторинга состоит в обнаружении нового, неизвестного сигнала и определении его параметров и местонахождения источника. Энергетическое обнаружение сигнала, в свою очередь, является производной от задачи спектрального анализа. При решении задачи радиомониторинга на первом этапе у потребителя могут быть весьма ограниченные априорные данные об электромагнитной обстановке в контролируемом районе. В эфире могут быть многие тысячи сигналов различной частоты, длительности и мощности. Среди этого множества сигналов имеются сигналы, представляющие интерес для потребителя, однако он может не знать конкретные параметры этих сигналов (их диапазон и частоту). Кроме того, эти сигналы могут быть сверхкороткими, могут возникать и исчезать, а время их появления в эфире неизвестно. Кроме того, они могут быть маломощными и даже лежать ниже уровня шума, но занимать широкую полосу частот. Примерами таких сигналов могут быть сигналы со скачками по частоте и шумоподобные сигналы. Чтобы обнаружить короткие сигналы с той или иной степенью вероятности необходима высокая скорость поиска. Но сигналы могут быть рядом с другими сигналами и лежать близко к уровню шума. Способность различить такие сигналы и выделить слабый сигнал из шума определяется разрешением системы мониторинга, в то время как скорость анализа дает возможность обнаружить и измерить короткие сигналы за разумное время. Одна и та же вероятность обнаружения короткого сигнала в разных системах мониторинга может быть получена при различном времени обнаружения, и чем выше скорость анализа, тем это время меньше. Скорость и разрешение системы мониторинга зависят от ее архитектуры. Такие системы строятся по принципу свипирования (анализаторы спектра), или сканирования (на базе сканирующего приемника), либо с использованием систем цифровой обработки сигналов (ЦОС) с вычислением спектра через алгоритмы быстрого преобразования Фурье (БПФ). Главным ограничением в системах первого вида, то есть свипирующих анализаторах, является противоречие между разрешением и скоростью, поскольку, чем выше разрешение, тем уже полоса фильтрации и тем больше время установления фильтра, то есть тем ниже скорость. В системах с ЦОС этого противоречия нет, и скорость работы определяется временем установления синтезаторов гетеродина приемника, разрядностью и частотой выборки АЦП, мощностью сигнального процессора DSP. Сочетание скорости и высокого разрешения в системе с ЦОС, использующей БПФ, позволяют обнаруживать и измерять параметры близко расположенных, коротких и сверхкоротких сигналов во всем контролируемом частотном диапазоне. Кроме того, система с БПФ позволяет обнаруживать сигналы, лежащие на уровне шума, за счет накопления и оценки флуктуаций уровня шума в некоторой полосе частот, то есть выявлять сигналы скрытных систем передачи информации с ШПС. Важнейшим инструментом обнаружения сигналов является энергетический порог. В сочетании с априорными данными по электромагнитной обстановке порог помогает уменьшить объем информации, получаемой при мониторинге, и выделить из массы сигналов только интересующие потребителя. Итак, потенциально интересные сигналы выбираются по превышению заданного порога. Энергетический порог может быть выражен и установлен как уровень мощности сигнала, или как уровень шума на входе приемника, или может определяться пользователем по какому-либо заданному им критерию. В системах мониторинга очень часто для уменьшения объема получаемой информации и времени обнаружения используют энергетический порог в виде усредненного спектра сигналов во всем диапазоне наблюдения. Требования предъявляемые к системе радиомониторинга Организация контроля сигналов систем наземной радиосвязи предусматривает решение целого ряда задач, основными из которых являются поиск и обнаружение радиосигналов при панорамном просмотре в требуемом диапазоне частот или при контроле фиксированного набора частот, определение параметров и вида модуляции обнаруженных сигналов, демодуляция заданных типов сигналов, определение при необходимости вида и структуры двоичных последовательностей, видов синхронизации, первичного и помехоустойчивого кодирования, скремблирования, перемежения и др., декодирование двоичных последовательностей и выделение сообщений, регистрация сигналов и сообщений, архивация данных радиоконтроля. Для решения данных задач требуется использование автоматизированных комплексов, обеспечивающих [1]: - настройку на сигналы с точностью до 1 Гц в диапазонах частот от 3 МГц до 30 МГц; - автоматическое сканирование сигналов в заданном диапазоне частот с отображением результатов сканирования в координатах время-частота и амплитуда-частота; - автоматическое сканирование по списку заранее заданных частот; - остановку на частоте обнаруженного радиосигнала по команде оператора или в автоматическом режиме; - демодуляцию заданных классов сигналов; - регистрацию аналоговых сигналов в цифровом виде и демодулированных сигналов на машинный носитель; - прослушивание уже записанных сигналов с использованием стандартных средств мультимедиа компьютера; - ведение базы данных обрабатываемых сигналов. Процедура определения параметров радиосигнала должна обеспечивать измерение уровня сигнала, номинала несущей частоты, вида модуляции, скорости манипуляции, разноса частот для сигналов с ЧМ, величины угла фазовой манипуляции для сигналов с ФМ. Демодулятор должен обеспечивать настройку на частотные и временные параметры входного сигнала в автоматизированном и автоматическом режимах. В первом случае настройка демодулятора осуществляется в режиме ввода значений сигнальных параметров оператором, во втором случае настройка осуществляется автоматизировано на основании результатов измерения модуляционных параметров сигналов. Структура и состав перспективных технических средств обработки должны быть направлены на обеспечение данного порядка действий. В соответствии с поставленными требованиями разрабатываемая система мониторинга радиообстановки должна функционировать в следующих основных режимах [1]: - режим поиска источников радиоизлучений; - контроль сигналов на известных частотах; - анализ параметров обнаруженных сигналов в автоматическом режиме; - демодуляция заданных типов сигналов; - регистрация сигналов; Рисунок 2.1- Приемник WR-3150i-DSP Размер платы для всех внутренних радиоприемников одинаковый: 114 х 290х 18 мм. Питание радиоприемника осуществляется от разъема компьютера. Потребляемая мощность составляет 4 Вт. Со стороны компьютера радиоприемник идентифицируется как внешнее устройство на шине ISA. С помощью перемычек на плате приемника устанавливается один из 8 фиксированных адресов. Таким образом, возможна установка до 8 радиоприемников в один компьютер. Пример установки двух радиоприемников в персональный компьютер показан на рисунок 2.2
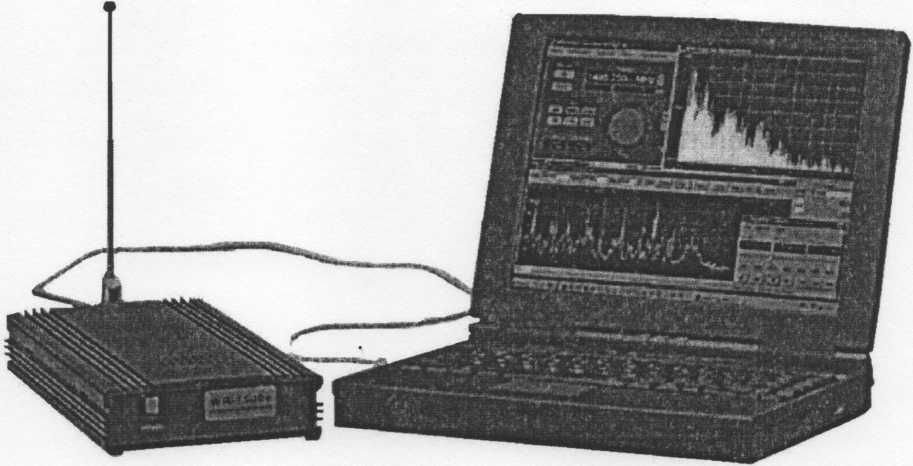
Рисунок 2.2-Установка двух радиоприемников в персон., компьютер Радиоприемники серии WR-3...i-DSP имеют встроенный цифровой сигнальный процессор ADSP-2105. Они используют для работы одно прерывание и один канал прямого доступа к памяти, номера которых также устанавливаются с помощью перемычек на плате. Преимуществом моделей радиоприемников с внешним исполнением является возможность их использования как в мобильном, так и в стационарных вариантах под управлением компьютеров различных типов. Однако при этом отсутствует возможность создания многоканальных малогабаритных комплексов на базе одного компьютера. На рисунке 2.3 показан пример соединения приемника WR-1500e с ноутбуком.
Рисунок 2.3-Соединение приемника WR-1500e с ноутбуком Размеры корпуса приемников с внешним исполнением составляют 122 х 216 х 48 мм. Питание радиоприемника осуществляется от внешнего источника через сетевой адаптер. Взаимодействие с компьютером выполняется либо через стандартный последовательный порт, либо, как дополнительная опция, по интерфейсу PCMCIA. Схожие по исполнению сканирующие компьютерные радиоприемники выпускаются фирмами ICOM (модели IC-PCR100 и IC-PCR1000) и OPTOELECTRONICS (модель OptoCom). Внешний вид приемника IC-PCR100 показан на рисунке 2.4
Рисунок 2.4-Приемник IC-PCR100 В настоящее время компьютерные радиоприемники создаются и российскими производителями. В качестве примера отечественных компьютерных радиосканеров можно привести приемники серии АРК-ЦТ. Внешний вид радиоприемника АРК-ЦТ1 изображен на рисунке 2.5
Рисунок 2.5-Радиоприемник АРК-ЦТ 1 Этот приемник обладает следующими характеристиками: диапазон частот — 20...2020 МГц, значение динамического диапазона — не менее 70 дБ, скорость перестройки в реальном масштабе времени с шагом 2 МГц под управлением ПЭВМ — не менее 140 МГц/с, потребляемая мощность — до 27 ВА, объем конструктива — 5, 6 дм. Управление перестройкой и передача данных осуществляется по одному параллельному порту, предусмотрено использование последовательного порта (как опция) для решения дополнительных задач. Все описанные выше модели компьютерных радиоприемников могут работать как под управлением фирменного программного обеспечения, так и под управлением специализированных программных средств, созданных независимыми разработчиками в интересах решения различных задач радиоконтроля [36]. Базовое программное обеспечение, поставляемое вместе с компьютерным приемником, предназначено для реализации основных функций управления приемником. Как правило, оно позволяет устанавливать различные параметры настройки приемника, выполнять несколько вариантов сканирования, осуществлять измерение относительного уровня сигнала на частоте приема, вести базу данных по результатам работы, декодировать в процессе приема сигналы некоторых стандартных протоколов и реализовывать выполнение определенных операции, например, запуска другой программы, при приеме заданной последовательности декодированных сигналов. На рисунке 2.6 приведен пример визуального отображения загрузки диапазона частот, полученной с использованием одной из русифицированных версий программного обеспечения для приемников Winradio.
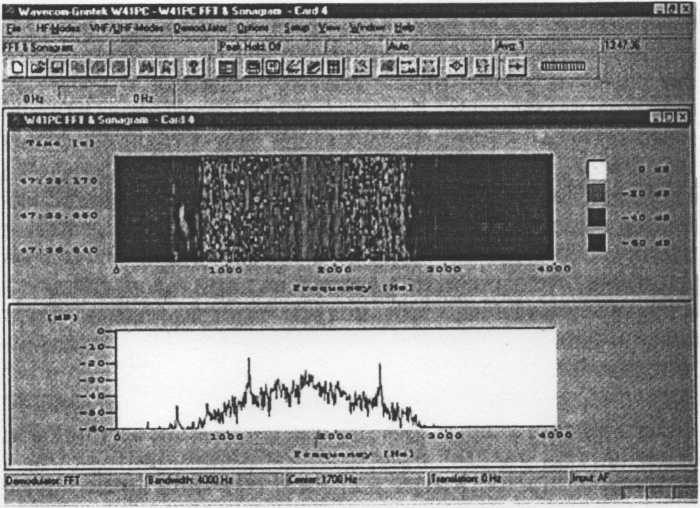
Рисунок 2.6-Отображения загрузки диапазона частот В настоящее время в состав стандартного программного обеспечения, поставляемого вместе со всеми описанными компьютерными приемниками, могут быть включены дополнительные опции, значительно расширяющие их функциональные возможности. Так, дополнительные программные средства, разработанные для приемников фирмы Winradio Communications позволяют проводить анализ временных и частотных характеристик сигналов, обработку сигналов DTMF, CTCSS, аналогового факсимиле, АХ.25, ACARS, МРТ-1327, РОС SAG. Для проведения процедур анализа и обработки сигналов используется стандартная звуковая карта компьютера. Существует специальный программный модуль для обработки стандартных протоколов, используемых на линиях цифровой связи декаметрового диапазона. Этот модуль интегрируется в базовую программу и работает с радиоприемниками Winradio, имеющими встроенный цифровой процессор обработки сигналов. Следует отметить, что управление большим числом различных моделей профессиональных компьютерных радиоприемников также обеспечивается такими программами радиомониторинга, как Филин, Патруль, Крот, ARCON EXPERT, созданными отечественными компаниями-разработчиками программного обеспечения. Пример одного из рабочих окон последней программы показан на рисунке 2.7 Образцами компьютерных демодуляторов-декодеров являются зарубежные изделия Wavecom, Hoka Code, Universal. Все они имеют варианты исполнения как в виде встраиваемых в компьютер плат, так и в виде отдельных модулей, подключаемых к компьютеру через соответствующие порты. Разработанное для них программное обеспечение позволяет проводить различные операции анализа аналоговых и цифровых сигналов, выделять сообщения, передаваемые с использованием основных видов протоколов в каналах декаметрового и метрового диапазонов. На рисунке 2.8 показан вариант представления спектра ФМ-сигнала, полученного с использованием изделия Wavecom W41PC.
Рисунок 2.8-Вариант представления спектра ФМ-сигнала Следует отметить, что постоянно расширяется число реализованных только программным образом различных универсальных и специализированных демодуляторов и декодеров. Как правило, обрабатываемый ими сигнал поступает с низкочастотного выхода радиоприемника, при этом ввод сигнала в компьютер осуществляется либо через COM-порт, либо через стандартную звуковую карту. Характерными примерами универсальных программ являются зарубежные RadioRaft, Hamcomm и отечественная PC_Monitor. Пакет программ PC Monitor предназначен для определения модуляционных параметров обнаруженных в эфире радиосигналов и демодуляции цифровых АМ-, ЧМ- и ФМ-сигналов. Он может поставляться как в составе комплексов программ радиоконтроля Регламент-П и Патруль, рассматриваемых в следующем разделе, так и обладает возможностью самостоятельного функционирования. Особенностью пакета является использование только программных методов обработки, реализованных на обычном компьютере, при этом для ввода сигнала используется обычный саундбластер. Это дало возможность отказаться от применявшихся ранее для таких целей дорогостоящих аппаратных средств (частотомеров, спектроанализаторов, сонографов, демодуляторов и т. д.) и специализированных цифровых вычислителей. Пример представления спектра, полученного комплексом программ PC_Monitor в процессе анализа четырехпозиционного ЧМ-сигнала, представлен на рисунке 2.9
Рисунок 2.9-Анализ четырехпозициоиного ЧМ-сигнала Специализированные программы служат, как правило, для обработки сигналов только одного типа или достаточно узкого круга сигналов. Нередко такими сигналами являются сигналы, используемые в различных системах мобильной связи, радиолюбительской связи, сигналы различных систем сигнализаций, например DTMF, и т. д. Созданием таких программ занимаются как отдельные радиолюбители, так и крупные организации, и, в частности, это присуще для компаний-разработчиков компьютерных радио приемников. Они часто в качестве дополнительных опций предлагают различные варианты программного обеспечения по обработке сигналов конкретных типов, специально ориентированные на особенности конкретного применения поставляемых моделей радиоприемников. Характерным примером компьютерной обработки радиосигналов является технология компьютерного пейджинга, т. е. прием с использованием ПЭВМ передаваемой по каналам пейджинговой связи информации. Используемые технические решения по обеспечению ввода поступающих пейджинговых сообщений в персональный компьютер по способу организации радиоприема можно разделить на два типа [37]. Интерфейс системы В режиме поиска источников радиоизлучений интерфейс пользователя должен обеспечивать задание оператором необходимых параметров поиска радиоизлучений (диапазон поиска, полосу пропускания, шаг перестройки радиоприемника, вид его детектора и уровень шумоподавления, вид и параметры модуляции интересующих сигналов). Результат сканирования указанного диапазона должен отображаться в графическом окне интерфейса в виде амплитудно-частотной характеристики. При необходимости диапазоны и параметры поиска источников радиоизлучений могут быть заданы заранее и храниться в формализованном виде в памяти компьютера. В процессе сканирования диапазона при обнаружении сигналов, уровень которых превышает заданный порог, или с интересующими значениями модуляционных параметров значения радиочастоты и параметры модуляции сигнала должны регистрироваться в ПЭВМ автоматически или после подтверждения оператором. Возможна приостановка сканирования для проведения регистрации сигнала на время установленной задержки или остановка на этой частоте до момента пропадания сигнала. Кроме этого, должна быть предоставлена возможность исключения повторно обнаруженных частот, отдельных заведомо неинформативных частот и участков анализируемого диапазона. Таким образом, режим поиска должен позволять оператору получать полную информацию о загрузке рабочего диапазона в виде списка частот, на которых отмечены интересующие его сигналы, и графического отображения загруженности анализируемого диапазона в координатах «уровень излучения — частота». Эта информация также может храниться в компьютере в виде отдельных файлов. В режиме контроля частоты сигналов, подлежащих мониторингу, результаты предварительно вводятся в память компьютера в любом режиме его функционирования, включая автоматическую запись в процессе сканирования. Каждая запись должна содержать информацию о номинале частоты, виде модуляции, скорости манипуляции, служебных параметрах источника излучения и поле дополнительной текстовой информации. Вся накопленная информация о частотах и сигналах может быть сохранена в виде файлов, что позволяет считать память каналов приемного устройства неограниченной. В любой момент эта информация может быть целиком перезагружена из необходимого файла. Программное обеспечение должно давать возможность сортировки и классификации частот по видам модуляции и параметрам источников, кроме того, любая запись должна быть найдена по текстовому полю комментария. Сканирование по каналам аналогично сканированию по диапазонам. Программа должна позволять выполнять выборочное сканирование частот по группам и видам модуляции. Кроме того, должен быть предусмотрен режим приоритетного сканирования. В качестве приоритетных могут быть выбраны любые частоты памяти каналов. В режиме анализа параметров обнаруженных сигналов в автоматическом режиме в качестве инструмента технического анализа обнаруженных сигналов в реальном масштабе времени используемое в комплексе программное обеспечение должно осуществлять: - графическое отображение значений амплитудных, фазовых и частотных параметров сигнала; - получение мгновенного и усредненного частотных спектров сигнала; - автоматическое, а также в режиме диалога с оператором определение модуляционных параметров сигнала (несущей частоты, разноса частот, скорости манипуляции и др.). Результаты анализа сигнала должны позволять определять его технические параметры с точностью, необходимой для дальнейшей демодуляции. В режиме демодуляции заданных типов сигналов программное обеспечение демодуляции основных типов сигналов, используемых в наземных системах радиосвязи, должно обеспечить: - настройку демодулятора на модуляционные параметры входного сигнала в ручном или в автоматизированном режиме; - демодуляцию заданных типов сигналов, при которой работоспособность демодулятора должна сохраняться при ошибке в установке значений несущей частоты или скорости манипуляции до 1%; установление и поддержание тактовой синхронизации при отношении сигнал/шум не ниже 3 дБ по мощности в диапазоне скоростей 10...2400 Бод; - вывод в процессе демодуляции результатов обработки на монитор в виде номеров частотных позиций или позиций фаз, отображаемых различными цветами, что позволит производить визуальный анализ в реальном масштабе времени двух- и многопозиционных сигналов и оценку методов их двоичного сигналообразования; - регистрацию демодулированного сигнала в цифровом или текстовом виде в файл на жестком магнитном диске ПЭВМ; - возможность формирования по команде оператора дополнительного файла с информацией о модуляционных параметрах сигнала, времени начала и окончания его обработки. |
Последнее изменение этой страницы: 2017-05-11; Просмотров: 1340; Нарушение авторского права страницы




 m
m 

 =
=  матрица размером рхр является квазикорреляционной симметричной, но не теплицевой. Действительно, можно сказать, что диагональные элементы связаны соотношением
матрица размером рхр является квазикорреляционной симметричной, но не теплицевой. Действительно, можно сказать, что диагональные элементы связаны соотношением (1.16)
(1.16) известен как ковариационный метод, поскольку матрица обладает свойствами ковариационной матрицы.
известен как ковариационный метод, поскольку матрица обладает свойствами ковариационной матрицы.

 совпадает с кратковременной автокорреляционной функцией сигнала (1.8), вычисленной для (i-k). Это означает, что
совпадает с кратковременной автокорреляционной функцией сигнала (1.8), вычисленной для (i-k). Это означает, что

 - четная функция, то
- четная функция, то (1.22)
(1.22)