
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Построение переходной кривой объекта.Стр 1 из 2Следующая ⇒
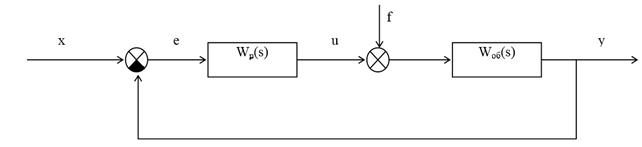
Цель работы – Определить настроечные параметры (настройки) типового (ПИ, ПД, ПИД) регулятора в одноконтурной АСР, обеспечивающие минимум интегрального квадратичного критерия качества – Выбрать промышленный регулятор и определить его настройки. Исходные данные:
Таблица 1.1. Данные для кривой разгона:
Построение переходной кривой объекта. Переходной кривой называется реакция звена на единичное скачкообразное воздействие при нулевых начальных условиях. В реальности амплитуда входного сигнала может быть отлична от единицы, в этом случае переходную кривую называют кривой разгона. По данным таблицы 1.1 строится переходная кривая объекта (рис. 1.1), при этом запаздывание не учитывается. Так как выходной сигнал имеет конечное установившееся значение, то есть система приходит к статическому режиму, в котором скорости изменения входного и выходного сигналов равны нулю, то можно говорить о том, что объект с самовыравниванием. Рисунок 1.1 - Переходная кривая объекта, построенная по табличным данным Определение параметров нескольких моделей объекта по переходной кривой методом «площадей» Симою М.П. Метод Симою: Метод площадей Симою М.П. позволяет определить передаточную функцию модели объекта по кривой разгона. Кривая разгона – реакция динамического звена (объекта регулирования) на скачкообразное воздействие произвольной амплитуды. В отличие от классического определения переходной характеристики амплитуда входного воздействия не равна единице. Кривая разгона может быть получена как экспериментально, так и расчетным путем. Динамические свойства объекта аппроксимируются моделью следующего вида:
где K – коэффициент усиления, τ – время запаздывания (запаздывание), ai, bi – коэффициенты передаточной функции,
Основной задачей является определение коэффициентов ai, bi передаточной функции методом, предложенным М.П. Симою. Для определения параметров модели (1) кривая разгона преобразуется к расчетной. Процедура приведения кривой разгона к расчетной зависит от динамических свойств объекта. Для практических целей представляют интерес два случая: - объект регулирования с самовыравниванием (пропорциональный). - объект регулирования без самовыравнивания (интегральный). Мы имеем модель с самовыравниванием, построим кривую по которой мы можем получить передаточную функцию объекта. Произведем расчет для заданной модели. Данный объект с самовыравниванием (пропорциональный) Коэффициент усиления равен
Для определения площадей построим нормированную кривую разгона
И сведем полученные данные в таблицу 2.1. Таблица 2.1
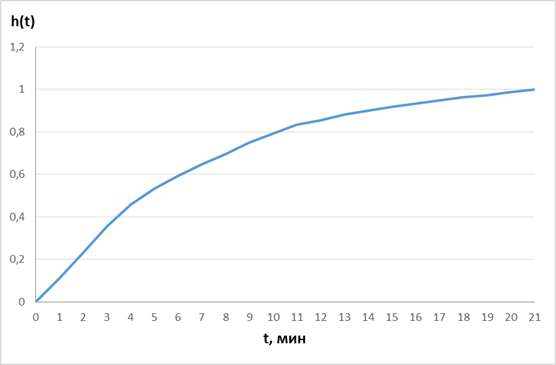
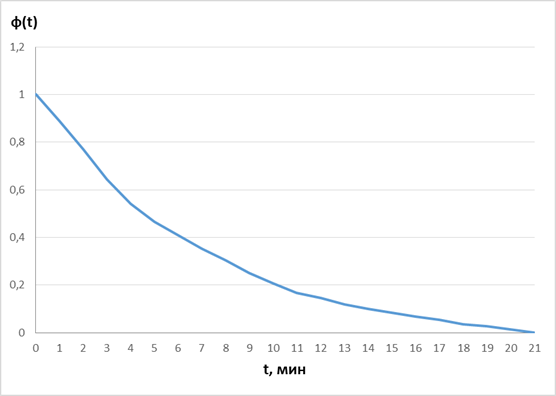
Построим нормированную кривую разгона объекта и кривую вспомогательной функции (рисунок 2.1, 2.2).
Рисунок 2.1 - Нормированная кривая разгона объекта
Рисунок 2.2 - Кривая вспомогательной функции
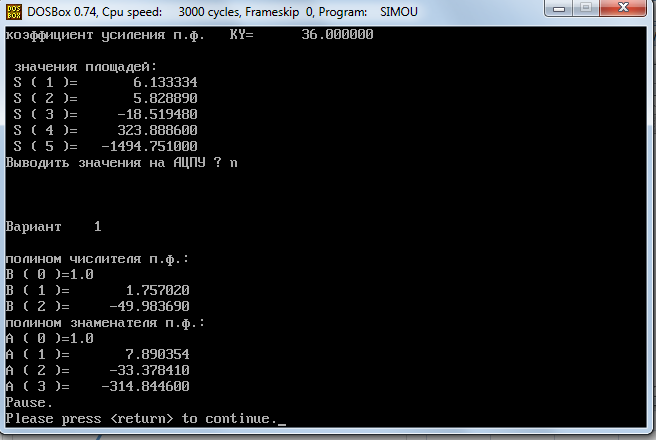
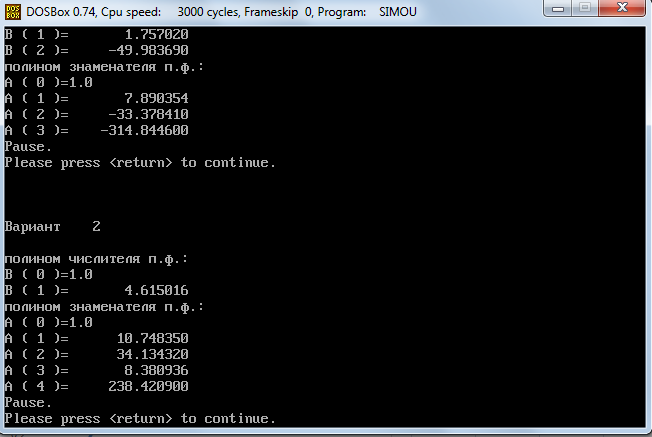
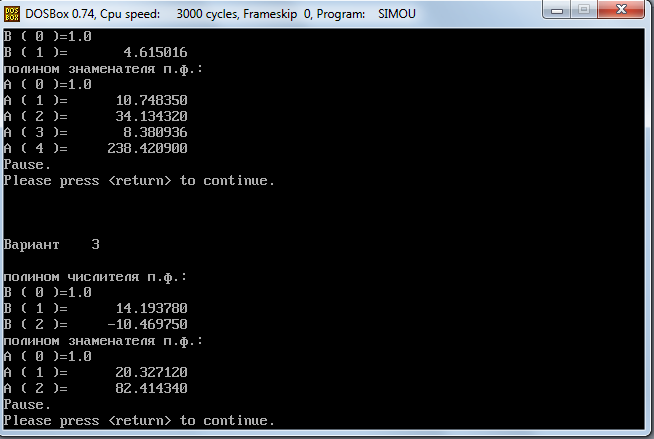
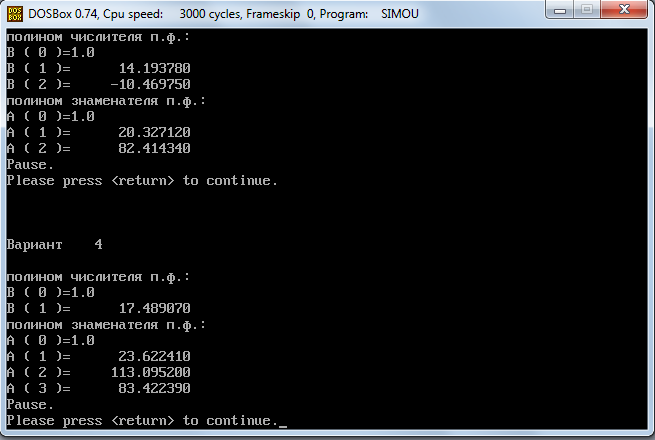
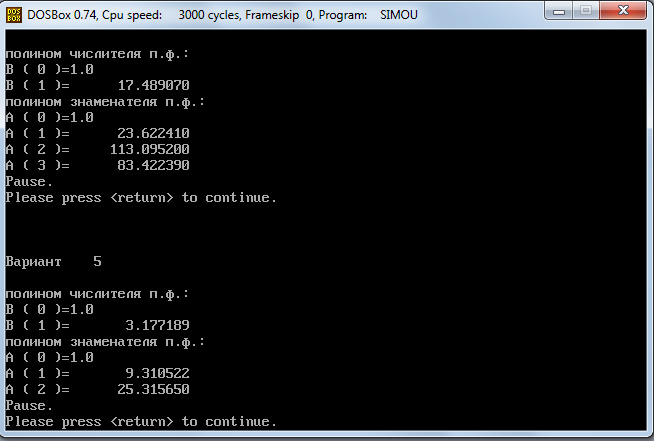
Полученное значение и есть значение «площади» Симою S1. Остальные расчёты проведём на ЭВМ (программа Simou.exe).
Расчет переходных кривых проведем только для вариантов 2, 3, 4 и 5, так, как только для них выполняется критерий Стодолы, т.е. коэффициенты характеристического полинома имеют положительные значения; так же введём дополнительный вариант 6 и 7 с передаточными функциями
соответственно. Выбор закона регулирования
Выберем для дальнейших расчётов пропорционально-интегральный (ПИ) регулятор и пропорционально-интегрально-дифференциальный (ПИД) регулятор. А) Пропорционально-интегральный (ПИ) регулятор
Передаточная и переходная функции
wи £ wрпи £ wп. Для упрощения расчетов начальную частоту будем считать равной нулю Значение wп =0, 68. Значит, диапазон рабочих частот регулятора: 0 £ wрпи £ 0, 68. Б) Пропорционально-интегрально-дифференциальный (ПИД) регулятор
Передаточная и переходная функции
wи £ wр £ wд. Также для упрощения расчетов начальную частоту будем считать равной нулю Значение
Рисунок 5.1 - Определение рабочей частоты регулятора ω Д Значит, диапазон рабочих частот регулятора: 0 £ wр £ 1, 63.
ПИД-регулятор:
К0=0, 01114
Цель работы – Определить настроечные параметры (настройки) типового (ПИ, ПД, ПИД) регулятора в одноконтурной АСР, обеспечивающие минимум интегрального квадратичного критерия качества – Выбрать промышленный регулятор и определить его настройки. Исходные данные:
Таблица 1.1. Данные для кривой разгона:
Построение переходной кривой объекта. Переходной кривой называется реакция звена на единичное скачкообразное воздействие при нулевых начальных условиях. В реальности амплитуда входного сигнала может быть отлична от единицы, в этом случае переходную кривую называют кривой разгона. По данным таблицы 1.1 строится переходная кривая объекта (рис. 1.1), при этом запаздывание не учитывается. Так как выходной сигнал имеет конечное установившееся значение, то есть система приходит к статическому режиму, в котором скорости изменения входного и выходного сигналов равны нулю, то можно говорить о том, что объект с самовыравниванием. Рисунок 1.1 - Переходная кривая объекта, построенная по табличным данным |
Последнее изменение этой страницы: 2017-05-11; Просмотров: 299; Нарушение авторского права страницы
 при заданном ограничении (запасе устойчивости)
при заданном ограничении (запасе устойчивости)  (
(  ) или
) или  ;
; 


 , (2.1)
, (2.1) – нормированная передаточная функция с коэффициентом усиления равным единице
– нормированная передаточная функция с коэффициентом усиления равным единице  .
.
 и график вспомогательной функции φ (t), подсчитаем их значения по формулам
и график вспомогательной функции φ (t), подсчитаем их значения по формулам
 .
.
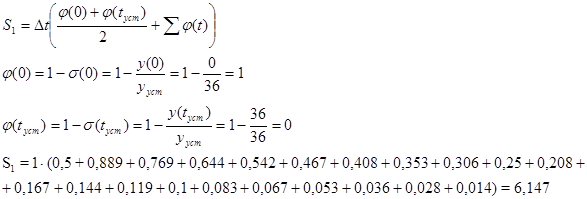


 .
.

 приближенно определим, как точку пересечения АФХ модели объекта с отрицательной полуосью. По рисунку 4.5 находим:
приближенно определим, как точку пересечения АФХ модели объекта с отрицательной полуосью. По рисунку 4.5 находим:  .
.
 приближенно определим как точку АФХ, соответствующую фазовому сдвигу φ (
приближенно определим как точку АФХ, соответствующую фазовому сдвигу φ (  )≈
)≈  (точка в первом квадранте). По рисунку 5.1 находим точку соответствующую фазовому сдвигу
(точка в первом квадранте). По рисунку 5.1 находим точку соответствующую фазовому сдвигу  : wд =1, 63.
: wд =1, 63.

 , К1=0, 05981, К2=0, 0321
, К1=0, 05981, К2=0, 0321  .
.