
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Теоретическая и экспериментальная переходные характеристики звена нагрузкиСтр 1 из 3Следующая ⇒
Цель работы 1.Исследование системы электропитания с регулируемым источником. 2.Оптимизация параметров системы электропитания с целью повышения качества регулирования и улучшения характеристик переходных процессов и стационарных режимов.
Описание системы Принципиальная схема системы электропитания приведена на рис.1. Ее образуют: - основной источник ЕО ; - регулируемый источник ЕР ; - датчик Д текущего значения регулируемой переменной; - регулятор Р с уставкой Xуст номинального значения регулируемой переменной; - исполнительный механизм ИМ , обеспечивающий изменение ЭДС ЕР.
Рис.1. Принципиальная схема системы питания
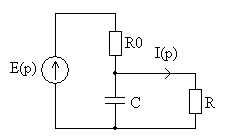
Эквивалентная схема замещения нагрузки приведена на рис.2. Регулируемой переменной является ток i, протекающий через резистор R. Параметры нагрузки: RO =1.5 Ом, R =1.0 Ом, С =1000 мкФ.
Рис.2.Схема замещения нагрузки
Для элементов цепи регулирования используются следующие эквиваленты:
1) датчик – пропорциональное звено с коэффициентом усиления КД; 2) регулятор – инерционное звено первого порядка с коэффициентом усиления КР и постоянной временя ТР; 3) исполнительный механизм – инерционное звено первого порядка с коэффициентом усиления Ким и постоянной времени Тим.
Параметры цепи регулирования: Ким =0.9, Тим =0.002 с, Тр =0.001 с. Номинальное значение регулируемой переменной в установившемся режиме: 100А.
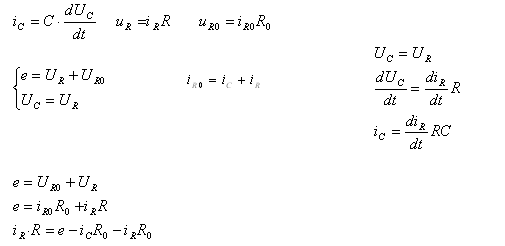
Расчет параметров звена, эквивалентирующего нагрузку.
Операторный метод
Физическое пространство
По передаточной функции видно, что это инерционное звено 1 порядка. Найдем численное значение его параметров.
Расчет величины ЭДС Ео основного источника 1) методом расчета расчета установившегося режима системы питания и нагрузки
ЕР=0 I=100 А Rэ=Ro+R=2.5 Ом
Ео=I*Rэ=250 В
2) используя передаточную функцию звена нагрузки
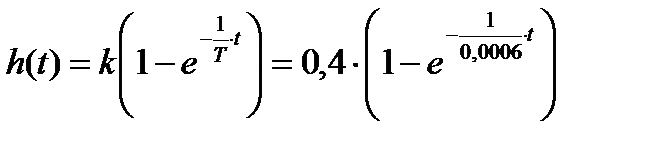
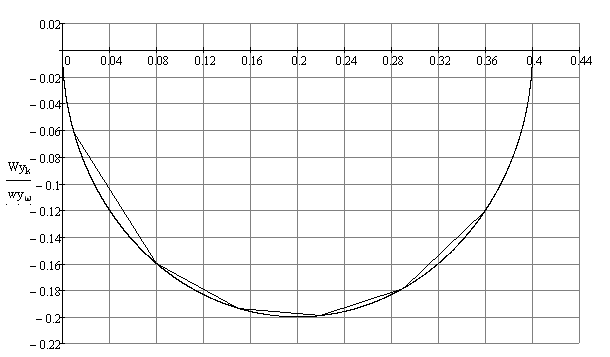
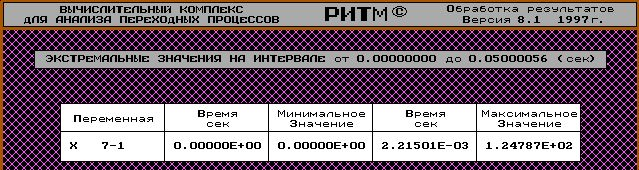
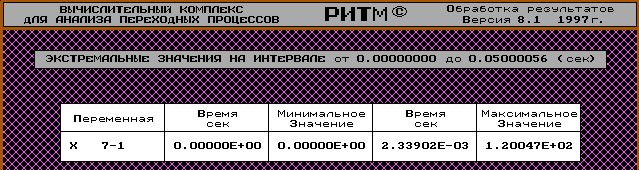
Теоретическая и экспериментальная переходные характеристики звена нагрузки Теоретическая переходная характеристика:
Экспериментальная переходная характеристика:
Определение параметров звена по экспериментальной переходной характеристике
K=h(
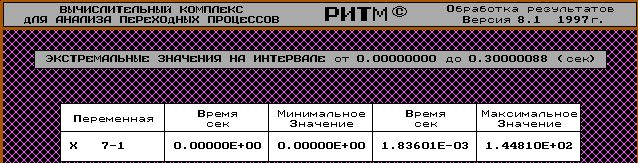
Тестовый расчет, подтверждающий правильность определения величины ЭДС Ео
Построение аналитической амплитудно-фазовой частотной характеристики звена, эквивалентирующего нагрузку.
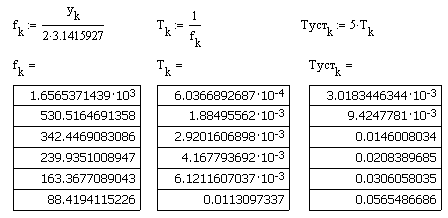
Таблица значений, необходимых для проведения серии расчетов, позволяющих построить экспериментальную амплитудно-фазовую частотную характеристику звена, эквивалентирующего нагрузку.
где ω – частота гармонического сигнала (рад/с) f – частота гармонического сигнала (Гц) Т – период колебаний Tуст – время окончания переходного процесса Tокн – время окончания расчета h – шаг расчета
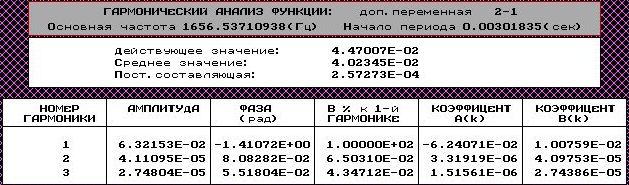
Экспериментальная амплитудно-фазовая частотная характеристика Схема имитационной модели:
Осциллограмма выходного и входного сигнала при частоте f=1656.5371 Гц
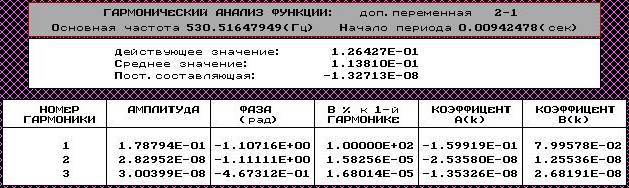
Значения полученные экспериментально:
Пример расчета для первой строки
где Xmi – амплитуда выходного сигнала
w` - вещественная часть АФЧХ w`` - мнимая часть АФЧХ
Сравнение аналитической и экспериментально полученной АФЧХ.
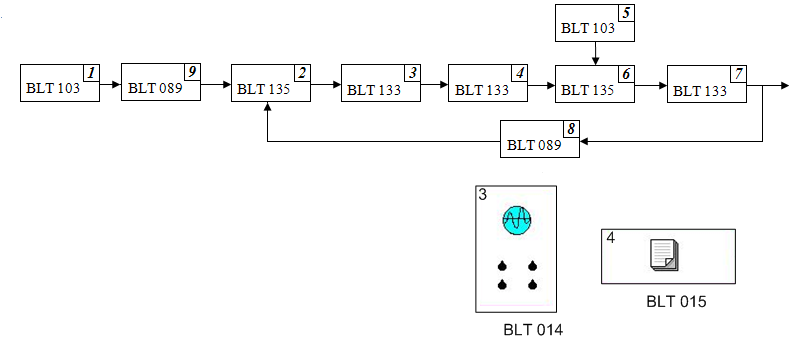
Аналитически и экспериментально полученные АФЧХ совпадают, что свидетельствует о правильности сделанных расчетов. Структурная алгоритмическая схема системы автоматического управления
где WР – передаточная функция звена, эквивалентирующего регулятор WИМ – передаточная функция звена, эквивалентирующего исполнительный механизм WН – передаточная функция звена, эквивалентирующего нагрузку WД – передаточная функция звена, эквивалентирующего датчик текущего значения регулируемой переменной
Имитационная модель
Параметры блоков: 3 К=194, 444 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1 9 К=0, 1
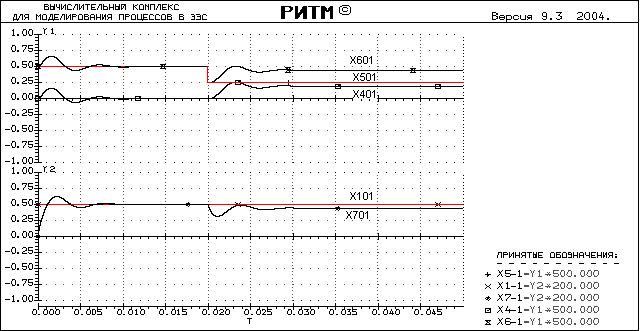
Полученная осциллограмма:
Видно что теоретически найденное значение КР обеспечивает нужный статизм с хорошей точностью. Но при данном значении параметра плохое перерегулирование σ =44, 81 %
Подберем такое значение КР при котором перерегулирование будет 25 %.
Обеспечение 25 % перерегулирования Имитационная модель
Параметры блоков: 3 К=85 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1 9 К=0, 1
Полученная осциллограмма:
При КР=85 мы добились требуемого значения перерегулирования, оно составляет σ =24, 79%, но при этом ухудшили статизм Таким образом нам не удалось найти такую точку, в которой одновременно обеспечивались бы нужные показатели статизма и перерегулирования. При КР=194, 44 обеспечивается 5% статизм, при КР=85 – 25% перерегулирование. У нас получились две точки. Так как нам известны методы борьбы со статизмом, мы берем точку с хорошим перерегулированием. Но поскольку в общем случае при борьбе со статизмом может как-то изменится перерегулирование, то мы должны взять перерегулирование с запасом ( на случай его ухудшения). Поэтому найдем такую точку, в которой перерегулирование было бы 20%.
Обеспечение 20 % перерегулирования
Имитационная модель
Параметры блоков: 3 К=65 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1 9 К=0, 1
Полученная осциллограмма:
При КР=65 статизм δ =12 % перерегулирование σ =20 %
Мы знаем два метода борьбы со статизмом: астатическое и компенсационное управление.
где К1 – коэффициент усиления идеального интегрирующего звена при р=0 знаменатель обратится в
Цель работы 1.Исследование системы электропитания с регулируемым источником. 2.Оптимизация параметров системы электропитания с целью повышения качества регулирования и улучшения характеристик переходных процессов и стационарных режимов.
Описание системы Принципиальная схема системы электропитания приведена на рис.1. Ее образуют: - основной источник ЕО ; - регулируемый источник ЕР ; - датчик Д текущего значения регулируемой переменной; - регулятор Р с уставкой Xуст номинального значения регулируемой переменной; - исполнительный механизм ИМ , обеспечивающий изменение ЭДС ЕР.
Рис.1. Принципиальная схема системы питания
Эквивалентная схема замещения нагрузки приведена на рис.2. Регулируемой переменной является ток i, протекающий через резистор R. Параметры нагрузки: RO =1.5 Ом, R =1.0 Ом, С =1000 мкФ.
Рис.2.Схема замещения нагрузки
Для элементов цепи регулирования используются следующие эквиваленты:
1) датчик – пропорциональное звено с коэффициентом усиления КД; 2) регулятор – инерционное звено первого порядка с коэффициентом усиления КР и постоянной временя ТР; 3) исполнительный механизм – инерционное звено первого порядка с коэффициентом усиления Ким и постоянной времени Тим.
Параметры цепи регулирования: Ким =0.9, Тим =0.002 с, Тр =0.001 с. Номинальное значение регулируемой переменной в установившемся режиме: 100А.
Расчет параметров звена, эквивалентирующего нагрузку.
Операторный метод
Физическое пространство
По передаточной функции видно, что это инерционное звено 1 порядка. Найдем численное значение его параметров.
Расчет величины ЭДС Ео основного источника 1) методом расчета расчета установившегося режима системы питания и нагрузки
ЕР=0 I=100 А Rэ=Ro+R=2.5 Ом
Ео=I*Rэ=250 В
2) используя передаточную функцию звена нагрузки
Теоретическая и экспериментальная переходные характеристики звена нагрузки Теоретическая переходная характеристика:
Экспериментальная переходная характеристика:
Определение параметров звена по экспериментальной переходной характеристике
K=h(
Тестовый расчет, подтверждающий правильность определения величины ЭДС Ео
|
Последнее изменение этой страницы: 2017-05-11; Просмотров: 413; Нарушение авторского права страницы



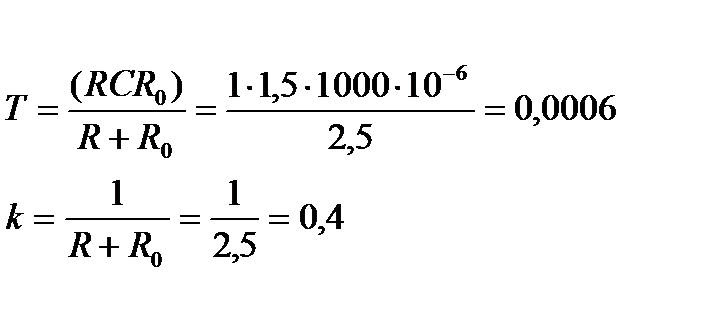






 =0.4
=0.4














 i
i

 i – фаза выходного сигнала
i – фаза выходного сигнала





 =9, 86 %.
=9, 86 %.

 По указанию преподавателя мы должны использовать астатическое управление. Суть данного метода заключается в том, что знаменатель передаточной функции становится равным
По указанию преподавателя мы должны использовать астатическое управление. Суть данного метода заключается в том, что знаменатель передаточной функции становится равным  . Это можно осуществить, встатвив после сумматора 2 и перед регулятором идеальное интегрирующее звено. При этом передаточная функция примет вид:
. Это можно осуществить, встатвив после сумматора 2 и перед регулятором идеальное интегрирующее звено. При этом передаточная функция примет вид: