
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Имитационная модель системы автоматического управления ⇐ ПредыдущаяСтр 3 из 3
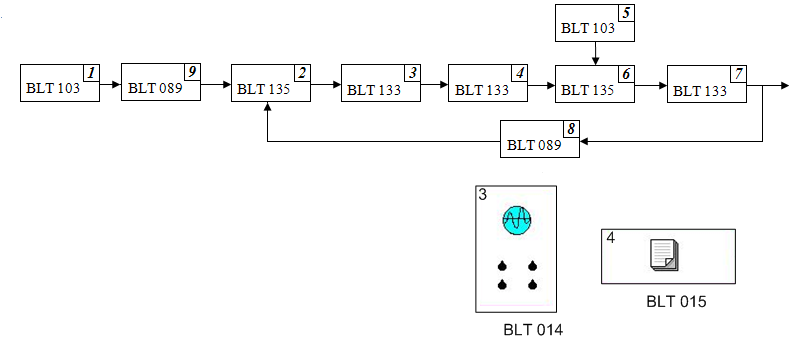
Используемые блоки:
BLT089 – пропорциональное звено; BLT103 – источник кусочно-постоянного сигнала; BLT133 – инерционное звено первого порядка; BLT135 – сумматор; BLT014 – осциллограф; BLT015 – табулятор.
Из первой устойчивой области берем точку КД=0, 1, КР=1 Таким образом параметры блоков имеют следующие значения 3 К=1 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1
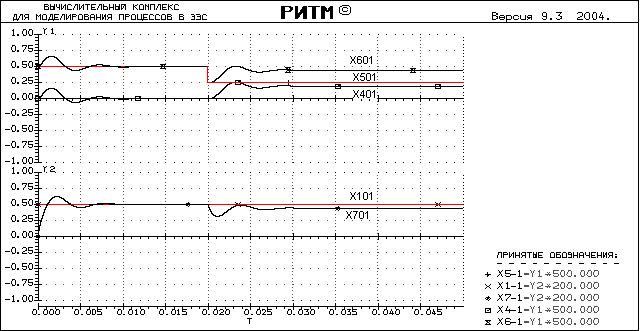
Полученная осциллограмма:
Видно, что при данных настройках системы требуемое условие ЕР=0 в установившемся режиме не выполняется. Внесем некоторые изменения в структуру системы. После 1 блока поставим пропорциональное звено с коэффициентом усиления равным коэффициенту усиления звена, эквивалентирующего датчик.
Таким образом получаем новую имитационную модель САУ.
.
Параметры блоков: 3 К=1 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1 9 К=0, 1
Полученная осциллограмма:
Из осциллограммы видно, что величина ЭДС ЕР регулируемого источника в статическом режиме уходит в ноль, но статизм системы очень плохой.
Подберем такой коэффициент КР( при фиксированном КД=0, 1), при котором обеспечивается 5% статизм системы.
где
В нашем случае
Тогда Т.е. для обеспечения 5% статизма выходная величина ( переменная X701) должна в установившемся режиме выйти на значение 100-100*0, 0625=93, 75 ( при номинальном значение = 100)
Теоретическое определение коэффициента Кр, обеспечивающего 5% статизм.
x=w*f где x – выходная величина f – внешнее воздействие w – передаточная функция Поскольку у нас 2 передаточных функции воспользуемся методом наложения
Упрощаем выражение и приравниваем его к 93, 75
Отсюда находим что КР=194, 444. Это значение попадает в область устойчивости
Имитационная модель
Параметры блоков: 3 К=194, 444 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1 9 К=0, 1
Полученная осциллограмма:
Видно что теоретически найденное значение КР обеспечивает нужный статизм с хорошей точностью. Но при данном значении параметра плохое перерегулирование σ =44, 81 %
Подберем такое значение КР при котором перерегулирование будет 25 %.
Обеспечение 25 % перерегулирования Имитационная модель
Параметры блоков: 3 К=85 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1 9 К=0, 1
Полученная осциллограмма:
При КР=85 мы добились требуемого значения перерегулирования, оно составляет σ =24, 79%, но при этом ухудшили статизм Таким образом нам не удалось найти такую точку, в которой одновременно обеспечивались бы нужные показатели статизма и перерегулирования. При КР=194, 44 обеспечивается 5% статизм, при КР=85 – 25% перерегулирование. У нас получились две точки. Так как нам известны методы борьбы со статизмом, мы берем точку с хорошим перерегулированием. Но поскольку в общем случае при борьбе со статизмом может как-то изменится перерегулирование, то мы должны взять перерегулирование с запасом ( на случай его ухудшения). Поэтому найдем такую точку, в которой перерегулирование было бы 20%.
Обеспечение 20 % перерегулирования
Имитационная модель
Параметры блоков: 3 К=65 Т=0, 001 4 К=0, 9 Т=0, 002 7 К=0, 4 Т=0, 0006 8 К=0, 1 9 К=0, 1
Полученная осциллограмма:
При КР=65 статизм δ =12 % перерегулирование σ =20 %
Мы знаем два метода борьбы со статизмом: астатическое и компенсационное управление.
где К1 – коэффициент усиления идеального интегрирующего звена при р=0 знаменатель обратится в
Структурная алгоритмическая схема системы автоматического управления, обеспечивающей нулевой статизм.
где WР – передаточная функция звена, эквивалентирующего регулятор WИМ – передаточная функция звена, эквивалентирующего исполнительный механизм WН – передаточная функция звена, эквивалентирующего нагрузку WИ – передаточная функция идеального интегрирующего звена WК – передаточная функция корректирующего звена WД – передаточная функция звена, эквивалентирующего датчик текущего значения регулируемой переменной
|
Последнее изменение этой страницы: 2017-05-11; Просмотров: 236; Нарушение авторского права страницы





 – статизм
– статизм - изменение выходной величины
- изменение выходной величины - изменение внешнего воздействия
- изменение внешнего воздействия ( после потери 50% ЭДС основного источника Е=250 В)
( после потери 50% ЭДС основного источника Е=250 В)









 По указанию преподавателя мы должны использовать астатическое управление. Суть данного метода заключается в том, что знаменатель передаточной функции становится равным
По указанию преподавателя мы должны использовать астатическое управление. Суть данного метода заключается в том, что знаменатель передаточной функции становится равным  . Это можно осуществить, встатвив после сумматора 2 и перед регулятором идеальное интегрирующее звено. При этом передаточная функция примет вид:
. Это можно осуществить, встатвив после сумматора 2 и перед регулятором идеальное интегрирующее звено. При этом передаточная функция примет вид: 