|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Управление асинхронными двигателями
Преобразователи частоты предназначены для регулирования скорости вращения асинхронных двигателей с короткозамкнутым ротором. По способу преобразования частоты, преобразователи подразделяются на непосредственные преобразователи частоты, состоящие из инвертора, преобразующего непосредственно синусоидальное напряжение промышленной частоты в переменное напряжение требуемой более низкой частоты, и преобразователи с промежуточным звеном постоянного тока (ПЧПТ). В последних, синусоидальное напряжение промышленной частоты, с помощью управляемого или неуправляемого выпрямителя, сначала преобразуется в постоянное напряжение, затем инвертируется в переменное требуемой частоты (как, выше так и ниже от частоты сети) и амплитуды. Благодаря простоте силовых цепей и цепей управления наибольшее распространение нашли преобразователи со звеном постоянного тока и неуправляемым выпрямителем. Блок схема силовой части преобразователи со звеном постоянного тока и неуправляемым выпрямителем, работающего на двигательную нагрузку показана на рис. 1.
Преобразователь состоит из неуправляемого выпрямителя, собранного по трехфазной мостовой схеме2, сглаживающего конденсатора3, и инвертора. Формирование величины выходного напряжения и его частоты производится инвертором, блок- схема которого показана на рис. 2.
Рис. 2
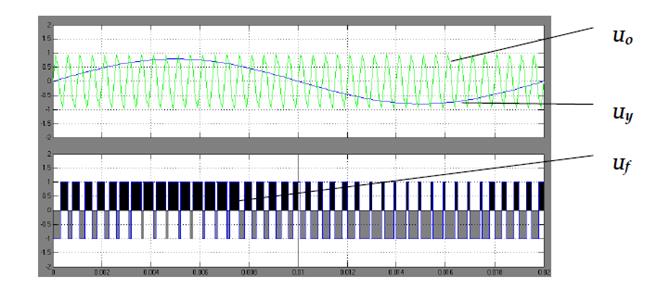
Благодаря сравнительной простоте системы управления, переменное напряжение требуемой величины и частоты, близкое по форме к синусоидальной формируется применением метода широтно-импульсной модуляции (ШИМ). На рис 3. показано формирование выходного напряжения одной фазы инвертора Uf, при частоте управляющего сигнала Uу 50 Гц и частоте пилообразного опорного сигнала Uо 2000 Гц. Достижение гладкой синусоидальной формы применением метода ШИМ не возможно. Не синусоидальность в форме выходного напряжения является причиной не синусоидальности формы кривых токов и как следствие пульсаций момента на валу. При низкой выходной частоте (малых скоростях вращения ротора), и малой инерционности нагрузки, эти пульсации могут привести к прерывистому характеру вращения ротора и повышенному шуму. Особенно резко эти пульсации проявляются при низких значения несущей частоты менее 3 кГц. С увеличением значения несущей частоты до 16 кГц, формы кривых напряжений и токов сильнее приближаются к синусоидальной, величины пульсаций момента уменьшаются, улучшаются шумовые характеристики.
Рис.3 Возможность установки различных значений несущей частоты является одним из критериев выбора преобразователя. Однако при высоких значениях несущей частоты проявляется ряд отрицательных эффектов. В первую очередь это связано с тем, что транзисторы Т (Рис. 2) обычно типа IGBT (биполярные с изолированным затвором), обладают односторонней проводимостью, что приводит к необходимости шунтирования их диодами Д, для обеспечения нормального протекания токов фаз. В определенные моменты времени ток фазы может протекать через диод Д при открытом транзисторе Т, что приводит к кратковременному образованию короткозамкнутых контуров и как следствие возникновение: - перенапряжений в обмотках двигателя, ухудшающих условия работы изоляции; - электромагнитного излучения высокой частоты, что может резко сказаться на работе радиотехнических устройств, установленных вблизи от преобразователя; - дополнительных источников тепла, что приводит к необходимости установки дополнительных теплоотводящих элементов. Формы входных напряжений и токов также отличаются от синусоидальной. Искажения формы входного напряжения определяются мощностью цепи, и резко проявляются при работе преобразователя на маломощную сеть. Искажения формы кривой тока, являются следствием принципа работы выпрямителя, и связаны с периодической перезарядкой конденсатора. Ослабление отрицательного влияния данных факторов достигается применением входных фильтров и выходных дросселей. Наличие фильтров, дросселей, встроенных в преобразователь, или поставляемых совместно с преобразователем, второй критерий выбора преобразователя. Наличие высших гармонических в кривых токов и напряжений предопределяет использование развитых средств измерений, мониторинга и защиты преобразователя. Наиболее точные измерения в преобразователях предполагают многократное измерение мгновенных значений токов и напряжений и следовательно точную регистрацию бросков токов и напряжений, что обеспечивает наиболее полную защиту преобразователя от перенапряжений и сверхтоков. Развитые средства измерений и контроль, как измеряемых, так и рассчитанных на их основе величин обеспечивают своевременное вмешательство в работу преобразователя и исключение выхода из строя как преобразователя, так и привода в целом, что также является критерием выбора преобразователя. Лабораторная работа 1. «Внешние сигналы МК. Работа с портами»
В рамках данного примера будет создана схема на основе МК ATmega16, которая в ответ на приходящий сигнал зажигает светодиод. Вначале сформулируем ТЗ. Разработать электронное устройство, которое в зависимости от приходящего сигнала будет зажигать светодиод. В качестве управляющего устройства необходимо использовать микроконтроллер ATmega16. Тактирование МК должно осуществляться от внешнего кварцевого резонатора на 4 МГц. При этом необходимо, чтобы приходящий сигнал в зависимости от нажатых кнопок имел напряжения 1, 2 и 3В. Также в управляющей программе необходимо сконфигурировать выводы МК следующим образом: выводы порта A назначить выходами с низким уровнем напряжения, выводы порта B сконфигурировать как входы в Z состоянии, выводы порта C – как входы с подтяжкой. Выводы порта D сконфигурировать следующим образом: выводы 7-4 и вывод 2 – как входы в Z состоянии, вывод 0 – как вход с подтяжкой, вывод 1 – как выход с высоким логическим уровнем, вывод 3 – как выход с низким логическим уровнем. Создание управляющей программы Так как в данном случае программа и общая задача довольно просты, то можно не писать алгоритм управляющей программы, в случаях, когда необходимо создать более сложную программу написание алгоритма обязательно. Программа будет написана в среде Code Vision AVR, моделирование работы схемы будет осуществлено в среде Proteus. Для того чтобы написать управляющую программу для данного устройства необходимо сделать следующее: 1. Открыть компилятор Code Vision AVR 2. Нажать на пункт Create new file
Рисунок 11. Создание нового файла в Code Vision AVR 3. В появившемся диалоговом окне выбрать project, нажать ok. Sourse – различные файлы, которые могут использоваться, например, для создания собственных библиотек или просто тестирования программ C. Project – проекты для МК, при создании проекта создаются сразу несколько файлов, подробнее об этом написано в лабораторной работе 1. 4. Следующее диалоговое окно предлагает использовать генератор начального кода. Нажать yes. 5. Появившееся окно – окно генератора начального кода (далее ГНК). Вначале необходимо выбрать тип используемого МК. В нашем случае это МК ATmega16. Также на этой же вкладке (вкладке chip) необходимо задать частоту тактирования МК. В нашем случае это 4МГц. Если все сделано правильно, то перед Вами будет окно следующего вида:
Рисунок 12. Задание типа МК и частоты тактирования в ГНК Code Vision AVR
6. Далее на вкладке Ports необходимо осуществить настройку портов ввода-вывода МК в соответствии с требованиями ТЗ. Порт А необходимо настроить как выход с низким логическим уровнем. Для этого нажимаем на кнопки In напротив всех битов порта:
Рисунок 13. Настройка порта А в ГНК Code Vision AVR.
Если выводы порта необходимо назначить выходами с ВЛУ, то необходимо нажать кнопку 0 напротив соответствующего бита. Появившийся на кнопке значок 1 означает, что теперь вывод будет выходом с ВЛУ. Аналогичным образом настроим остальные порты МК.
Рисунок 14. Конфигурация портов В, С, D в ГНК.
Чтобы изменить состояние вывода из выхода в Z состоянии в выход с подтяжкой необходимо напротив соответствующего бита нажать на кнопку T. На кнопке появится значок Р – что означает включение подтяжки. Остальные вкладки ГНК используются для настройки перифирии МК и использования его специальных функций. 7. В меню File ГНК выбрать пункт Generate, Save and Exit, затем сохранить предлагаемые файлы. Если все сделано правильно, то перед Вами появится окно следующего вида:
Рисунок 15. Общий вид окна программы Code Vision AVR после генерирования начального кода. Максимизируйте окно файла с расширением.с. Окно файла с расширением.prj используется для комментирования проекта. При написании сложных программ в нем можно оставлять, например, описание использовавшихся переменных, функций и т.д. Окно messages показывает ошибки при написании текста программы, окно Navigator показывает список файлов, использующихся в проекте (подробнее смотри в лабораторной работе 1). Таким образом, не написав ни одной строчки программного кода, было выполнено большинство требований ТЗ, а именно, использование МК ATmega16, тактирование его с частотой 4 МГц, была осуществлена настройка портов МК требуемым способом. Далее выполним пункт ТЗ о том, чтобы тактирование осуществлялось от внешнего резонатора. Для этого в меню выберем пункт Tools - > Chip Programmer. В появившемся окне ставим галочки напротив пунктов Program Fuse Bit(s) и Sut0=0:
Рисунок 16. Программирование МК на тактирование от внешнего резонатора
Таким образом, мы запрограммировали т.н. Fuses или фьюз биты – использующиеся для настройки МК на низком уровне. Программировать их следует только четко зная за что отвечает тот или иной фьюз. Неправильное программирование фьюз битов в реальном устройств может привести к выходу МК из строя. Такая конфигурация справедлива для использования внешних резонаторов с частотами 1 – 8 МГц. Далее обратимся к окну для написания программ (файлу с расширением.с). В данном компиляторе применены разные цвета для отображения текста. Фиолетовый цвет используется для отображения комментариев, зеленый – для директив предпроцессора, жирный текст используется для служебных слов или стандартных слов, обычный текст – для обычного программного кода. ГНК создает не только требуемые строки программного кода но и полезные комментарии, которыми можно пользоваться при написании программ, например, определять глобальные переменные после строки // Declare your global variables here Далее выполним пункт ТЗ о реакции МК на приходящий на него внешний сигнал. В зависимости от приходящего сигнала, МК должен включать подключенный к нему светодиод (если приходящий на него сигнал высокого уровня) и наоборот. Таким образом, в устройстве будет использоваться 2 вывода – один для обработки внешнего сигнала, второй – для переключения светодиода, т.е. один вывод должен использоваться как вход, другой – как выход. При этом вход будем использовать в Z состоянии для иллюстрации того, для чего используется подтяжка. Порт А в устройстве полностью настроен как выход, поэтому используем один из выводов порта для переключения светодиода, например, вывод 0. Для входа используем любой вход в Z состоянии, например, вывод 2 порта D. Определившись с используемыми в устройстве выводами, напишем процедуру обработки внешнего сигнала после строки // Place your code here. Для требуемой в ТЗ цели необходима следующая запись:
if (PIND.2 == 1) PORTA.0 = 1; else PORTA.0 = 0;
Означает она следующее: если МК считает, что на выводе 2 порта D напряжение ВЛУ, то послать на вывод 0 порта A сигнал ВЛУ, в противном случае послать на вывод 0 порта A 0 или сигнал НЛУ. Таким образом, все требования, относящиеся непосредственно к МК и механизму его работы были выполнены, остальные требования должны быть реализованы уже непосредственно применением соответствующих электронных компонент. Далее я приведу окно программы после удаления строк непосредственно не влияющих на выполнение программы МК – комментариев, доп. Настроек МК и т.д. Этого можно и не делать, здесь это делается с целью показать, что для реализации требований данного ТЗ необходимо всего около 10 строк программного кода:
Рисунок 17. Листинг управляющей программы в среде Code Vision AVR
Далее необходимо осуществить компиляцию проекта, нажав в меню Project-> Make и убедиться в отсутствии ошибок в программе. Затем нужно сохранить проект. После этого программа готова для симуляции в среде proteus, либо для непосредственной записи в МК (при симуляции в среде Proteus, корректируя программу необязательно каждый раз сохранять программу, достаточно лишь скомпилировать проект, развернуть окно Proteus и заново запустить симуляцию). Принципиальная электрическая схема устройства. Для симуляции работы электронного устройства, отвечающего требованиям ТЗ необходимо собрать схему согласно рисунку 18 в программе Proteus.
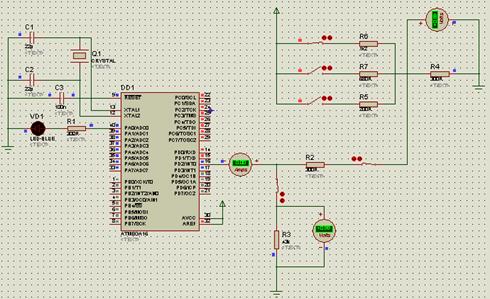
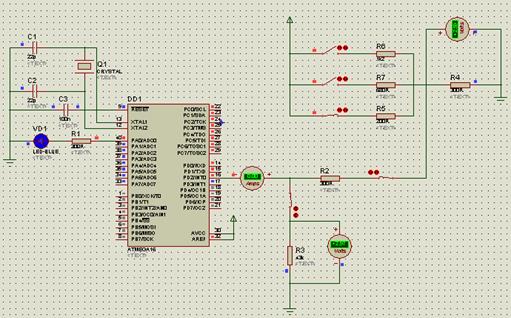
Рисунок 18. Принципиальная электрическая схема устройства в среде Proteus. Для того, чтобы собрать данную схему необходимо сделать следующее: 1. Cоздать новый проект, нажав в меню File -> New Design 2. Подключить к проекту модели компонент устройств, использующихся в схеме. Для этого необходимо нажать на кнопку Pick from libraries
Рисунок 19. Добавление компонент из библиотек в среде Proteus.
В появившемся окне в разделе keywords (ключевые слова) необходимо набрать название требуемого компонента и нажать ок. Для добавления МК набрать Atmega16, для светодиода – LED-BLUE, для емкостей – capacitors и дополнительно выбрать требуемый номинал емкости, для переключателей набрать switch, для резисторов – resistors и выбрать номинал сопротивления (мощность использовавшихся резисторов выбиралась как 0, 6Вт). Для добавления заземления и питания выбрать пункт Terminals mode и выбрать соответственно пункты GND и POWER
Рисунок 20. Добавление к проекту питания и заземления
Для добавления вольтметров и амперметров выбрать пункт Virtual instruments mode и соответственно добавить DC AMMETER и DC VOLTMETER
Рисунок 21. Добавление к проекту измерительных приборов. Далее с помощью мыши необходимо расположить и соединить компоненты в поле проекта в соответствии со схемой рисунка 18. Затем необходимо настроить компоненты. Во-первых необходимо загрузить в МК, написанную для него управляющую программу. Для этого необходимо щелкнуть 2 раза по модели МК и в пункте Program file указать путь к программе, также здесь же необходимо задать частоту тактирования МК, равную 4 МГц и нажать Ок. Также щелкнув 2 раза по резонатору необходимо задать его частоту равной 4 МГц. Теперь все компоненты схемы готовы к работе. Дадим некоторые пояснения к схеме, изображенной на рисунке 18. DD1 – использующийся в устройстве МК ATmega16. В среде Proteus отображаются не все выводы МК. Некоторые из них, например, выводы GND, VCC соединены по умолчанию соответственно с землей и питанием, остальные соединяются исходя из особенностей программы. Для данного случая используются следующие соединения: вывод 9 МК (Reset) заземлен конденсатором C3 емкостью 0, 1мкФ, к выводам 12 и 13 подсоединяется внешний кварцевый резонатор для тактирования работы МК, к выводам питания аналоговой части и опорного напряжения АЦП (30, 32) подсоединено напряжение питания (в данном случае 5В), вывод 40 МК соединяется через токоограничительный резистор R1 сопротивлением 300 Ом со светодиодом VD1, служащим для отображения результатов выполнения программы, вывод 16 МК (PD2) соединяется с цепью, моделирующей различные внешние сигналы, приходящие на МК. Резистор R3 моделирует подтяжку ножки МК к земле схемы, резистор R2 служит для ограничения тока (его можно не ставить, равно как и резистор R3). Схема, состоящая из резисторов R4-R7 моделирует делитель напряжения (подробнее см. в книге Горовиц, Хилл «Искусство схемотехники», т.1) и соответственно создает напряжения 1, 1, 5 и 3В (включение совместно резисторов R6 и R7 вызывает напряжение 2В), таким образом, создаются требуемые в ТЗ напряжения внешнего сигнала МК.
Симуляция работы устройства. Для того, чтобы запустить симуляцию работы устройства в среде Proteus необходимо нажать кнопку Play, расположенную в нижней части окна программы. Данное устройство моделирует реакцию МК на приходящий внешний сигнал с определенным уровнем напряжения. Вначале с помощью переключателей соединим резисторы R2 и R3 и не будем ничего подавать на МК:
Рисунок 22. Подача напряжения 0В на МК.
В результате симуляции видим, что светодиод не загорается, следовательно, МК воспринимает приходящий на него сигнал нулем, что соответствует выводам, описанным в разделе внешние сигналы МК. Увеличим напряжение внешнего сигнала до 1В, подключив резистор R6:
Рисунок 23. Подключение внешнего сигнала с уровнем напряжения 1В.
Как видно из рисунка 23 имеем тот же результат, что и в предыдущем случае. Далее подключим напряжение 1, 5В. Для этого оборвем цепь R6 и соединим цепь R7.
Рисунок 24. Подача на МК сигнала с напряжением 1, 5В.
Получили тот же результат, что и в предыдущем случае. Далее подадим на МК 2В. Для этого замкнем цепи резисторов R6 и R7 одновременно. Исходя из теории о внешних сигналах МК и графика, изображенного на рисунке 1, в этом случае должен произойти переход сигнала из 0 в 1, т.к. пороговое значение напряжения перехода из 0 в 1 для ATmega16 для напряжения питания составляет 1, 9В. Таким образом, светодиод должен загореться исходя из нашей программы.
Рисунок 25. Подача внешнего сигнала 2В.
Однако, светодиод не загорается. Возможных причин тому несколько. Во-первых, неточная модель МК в среде Proteus, во-вторых – вероятностный характер данного перехода для данного уровня сигнала. Подадим гарантированное значение для перехода сигнала из 0 в 1. Как говорилось ранее, для напряжения питания 5В оно составляет 3В. Для этого разорвем цепи R6 и R7 и соединим цепь R5.
Рисунок 26. Подача на МК сигнала 3В.
Из рисунка видно, что в данном случае переход сигнала из 0 в 1 был осуществлен. Таким же образом можно проанализировать и обратный переход из 1 в 0. Выводом из данного примера может служить то, что для точного восприятия МК внешнего сигнала необходимо проектировать схему таким образом, чтобы напряжение этого сигнала принимало гарантированное значение – 3 и более вольта для сигнала ВЛУ и 1 и менее вольта для сигнала НЛУ (при напряжении питания МК 5В). Также данный пример показывает как правильно настроить порты МК, как тактировать МК от внешнего кварцевого резонатора, а также типичную схему подключения МК в электронном устройстве. |
Последнее изменение этой страницы: 2019-03-20; Просмотров: 301; Нарушение авторского права страницы
 Рис. 1
Рис. 1