
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Информационная маршрутизация
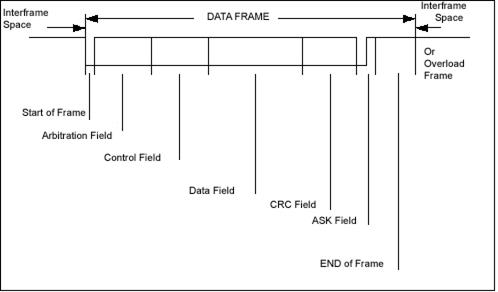
В системах CAN, нет никакой информации относительно конфигурации системы (например, адрес узла). Это имеет несколько важных следствий: Гибкость системы: Узлы могут быть добавлены к CAN - сети без изменения программного обеспечения и аппаратных средствах любого узла или прикладного уровня. Маршрутизация сообщения: Содержание сообщения определяется идентификатором. Идентификатор не указывает адресата сообщения, но описывает значение данных, так, чтобы все узлы в сети были способны решить фильтрацией, должны ли они воздействовать на данное сообщение или нет. Групповая обработка: Любое число узлов может получать и одновременно воздействовать на одно и то же сообщение. Непротиворечивость данных: Внутри CAN-сети гарантируется, что сообщение одновременно принято или всеми узлами или ни одним узлом. Виды кадров Ø Кадр данных (data frame) — передаёт данные; Ø Кадр запроса передачи (remote frame) — служит для запроса на передачу кадра данных с тем же идентификатором; Ø Кадр перегрузки (overload frame) — обеспечивает промежуток между кадрами данных или запроса; Ø Кадр ошибки (error frame) — передаётся узлом, обнаружившим в сети ошибку.
Начало кадра (Start of Frame) Отмечает начало кадра данных или кадра удаленного запроса данных. Состоит из бита с лог. '0'. Узлу разрешено начинать передачу только при свободной шине (см. простой шины). Все узлы должны быть синхронизированы по началу фронта, вызванного полем " начало кадра" (см. аппаратная синхронизация) узла, начавшего работу первым. Поле арбитража (Arbitration Field) Состоит из идентификатора и RTR-бита. Поле контроля (CONTROL FIELD) Включает 6 бит. Это - код длины данных (4бита) и 2 бита зарезервированные под будущие расширения. Зарезервированные биты должны быть " 0". Поле данных (стандартный и расширенный форматы) (Data field) Поле данных состоит из данных, которые будут переданы внутри кадра данных. Оно может содержать от 0 до 8 байт, каждый содержит 8 бит, которые передаются, начиная с MSB. Поле CRC (стандартный и расширенный форматы) (CRC field) Содержит последовательность CRC и CRC - разделитель. Поле подтверждения (стандартный формат и расширенный формат) (ACK field) Поле подтверждения имеет длину два бита и содержит: " область подтверждения" и разделитель подтверждения. В поле подтверждения передающий узел посылает два бита с единичным уровнем. Приемник, который получил сообщение правильно, сообщает об этом передатчику, посылая бит с нулевым уровнем в течение приема поля " область подтверждения". Конец кадра (стандартный формат и расширенный формат) (End of frame) Каждый кадр данных и кадр удаленного запроса данных ограничен последовательностью флагов, состоящей, из семи единичных бит. Кадр удаленного запроса данных (Remote frame) Узел, действующий как приемник некоторых данных, может инициировать передачу соответственных данных исходными узлами, посылая кадр удаленного запроса данных. Кадр удаленного запроса данных существует и в стандартном формате и расширенном формате. В обоих случаях он состоит из шести битовых полей: " начало кадра" (Start of frame), " поле арбитража" (Arbitration field), " управляющее поле" (Control field), " поле CRC" (CRC - field), " поле подтверждения" (ACK field), " конец кадра" (End of frame). В отличие от кадра данных, RTR бит кадра удаленного запроса данных - единичный. В этом кадре отсутствует поле данных. При этом значение кода длины данных может принимать любое значение в пределах допустимого диапазона [0, 8]. Значение кода длины данных соответствует коду длины данных кадра данных. RTR бит указывает, является ли переданный кадр кадром данных. Кадр ошибки (Error frame) Кадр ошибки состоит из двух различных полей. Первое поле получается суперпозицией флагов ошибки, полученных от различных узлов. Следующее поле - разделитель ошибки (Error Delimiter).
7. Цифровая обработка сигналов
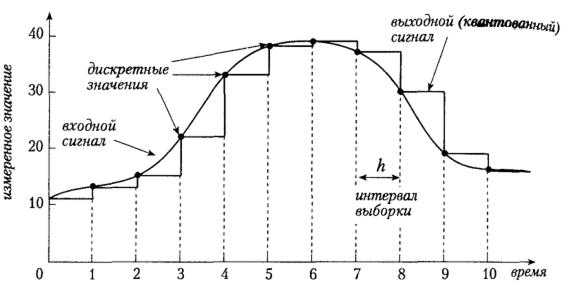
Сигнал, выработанный датчиком, должен быть отфильтрован от всех посторонних частот до того, как он будет обработан компьютером. в частности, необходимо устранить высокочастотный шум, который обычно наводится в кабеле при передаче сигнала. Отфильтрованные измерительные сигналы собираются в мультиплексоре. Это устройство, которое имеет несколько входов и один выход. Основное назначение мультиплексора – уменьшить общую стоимость системы за счет применения только одного устройства обработки (в данном случае – управляющего компьютера), которое обычно существенно дороже мультиплексора для всех входных сигналов. Преобразование аналогового сигнала в цифровой происходит в аналогово-цифровом преобразователе (АЦП). Схема выборки и хранения запоминает мгновенные значения входного сигнала в заранее установленные моменты времени и удерживает его постоянным на выходе в течение интервала дискретизации. перед дальнейшей обработкой в компьютере значение сигнала измерительной информации необходимо дополнительно проверить, чтобы удостовериться в том, что оно приемлемо и имеет смысл в контексте физического процесса. Компьютер не может непрерывно считывать аналоговые сигналы, а выбирает их только в некоторые моменты времени. Поэтому компьютер воспринимает сигнал в виде последовательности дискретных значений. Дискретизация (sampling) – выборка, оцифровка, квантование – представляет собой считывание сигнала только в определенные моменты времени; этот процесс реализуется в компьютере специальной схемой. Дискретизация включает мультиплексирование и АЦ-преобразование. Эти операции должны быть строго синхронизированы с помощью задающего таймера. Сама по себе дискретизация происходит очень быстро. Однако во время АЦ-преобразования не должно быть каких-то изменений во входном сигнале, которые могли бы повлиять на цифровой выход. Это обеспечивается операцией выборки и хранения (sample-and-hold) в каждом цикле дискретизации – значение аналогового сигнала считывается в начале каждого интервала и остается постоянным в течение всего времени АЦ-преобразования. Эта операция называется задержкой нулевого порядка (рис. 1). Такой подход используется при численном моделировании нелинейных систем и при дискретизации по времени непрерывных динамических систем.
Рис. 1. Дискретизация аналогового сигнала с задержкой нулевого порядка.
Очень важно правильно определить интервал дискретизации аналогового сигнала; в общем случае это представляет собой нетривиальную задачу. Интервал дискретизации h должен быть достаточно коротким, чтобы выходной сигнал с приемлемой точностью описывал изменения аналогового входа. Теоретически частота дискретизации должна более чем в два раза превышать частоту наивысшей составляющей преобразуемого сигнала. Если интервал дискретизации слишком велик, т.е. частота выборки слишком мала, то компьютер получит неверную картину исходного сигнала. В то же время слишком малый интервал, т. е. высокая частота выборки, приводит к тому, что управляющий компьютер выполняет неоправданно много вычислений. Кроме того, чем больше быстродействие – тем дороже устройство. Поскольку после выборки об исходном сигнале ничего не известно до следующей выборки, период дискретизации должен быть настолько коротким, чтобы исходный сигнал не успел значительно измениться. Частота выборки должна быть достаточной для последующего восстановления аналогового сигнала из дискретного. Нижний предел частоты связан с динамикой процесса., т. е. насколько быстро измерительный сигнал, а следовательно, и первоначальная физическая величина изменяются во времени.. ключевой задачей дискретизации является сбор достаточной информации для последующей обработки сигнала. В общем виде цифровой фильтр можно представить как
где h - это интервал выборки, Фильтры могут быть «причинными» и «непричинными». Причинный фильтр вычисляет выходное значение на основании ранее введенных данных. поэтому все фильтры реального времени являются причинными. Последовательность отфильтрованных значений на выходе будет отставать на некоторое время по сравнению с последовательностью на входе. Если данные обрабатываются в автономном режиме, например при анализе серии значений уже собранных измерений, можно использовать непричинный фильтр.
Фильтрация Двумя основными параметрами аналоговой фильтрации являются ширина полосы пропускания и граничная частота. Полоса пропускания – это диапазон частот, проходящих фильтр без изменений. Граничная частота, или частота среза, - это частота, на которой амплитуда сигнала ослабляется в Фильтр низкой частоты (ФНЧ) пропускает частоты ниже граничной частоты и ослабляет компоненты с частотами выше этого значения. Этот фильтр используется для устранения или уменьшения тех частотных составляющих, которые могут способствовать появлению псевдочастот, и поэтому он также называется противопсевдочастотным фильтром. Фильтр высокой частоты (ФВЧ) пропускает высокие частоты и ослабляет низкие. Полосовые фильтры пропускают частотные компоненты, лежащие между двумя граничными отсекающими частотами. Преобразованные в цифровую форму измерительные данные должны быть подвергнуты проверке. После АЦ-преобразования необходимо выполнить следующие операции – первичную обработку: § компенсировать дрейф; § сохранить исходные данные; § проверить соответствие исходных данных параметрам датчика – диапазону допустимых выходных значений и диапазону скоростей изменения выходного сигнала; если значение выходит из этих диапазонов, то должны генерироваться аварийные сообщения или другие указания для оператора; § вычислить среднее значение исходных данных («посторонние» значения, которые заметно отличаются от других, возможно, должны быть отброшены); § применить цифровую фильтрацию; § сохранить отфильтрованные данные. После цифровой фильтрации выполняются: § пересчет единиц измерения – масштабирование (при необходимости); § линеаризация; § другие типы обработки данных, например статистический анализ; § в автоматических системах – анализ входных данных для принятия решения о дальнейших действиях, например генерации управляющих или опорных сигналов.
|
Последнее изменение этой страницы: 2019-03-20; Просмотров: 315; Нарушение авторского права страницы

 - отфильтрованный выход, а y – вход. Аргумент kh, представляющий собой время, можно рассматривать и просто как номер k в последовательности входных значений. Если все коэффициенты
- отфильтрованный выход, а y – вход. Аргумент kh, представляющий собой время, можно рассматривать и просто как номер k в последовательности входных значений. Если все коэффициенты  равны нулю, то такой фильтр называется фильтром скользящего среднего. с конечной импульсной характеристикой. Если некоторые либо все коэффициенты
равны нулю, то такой фильтр называется фильтром скользящего среднего. с конечной импульсной характеристикой. Если некоторые либо все коэффициенты  раз, что соответствует уменьшению мощности в 2 раза по сравнению с пропускаемыми частотами.
раз, что соответствует уменьшению мощности в 2 раза по сравнению с пропускаемыми частотами.