
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Регуляторы с трением между твердыми теламиСтр 1 из 3Следующая ⇒
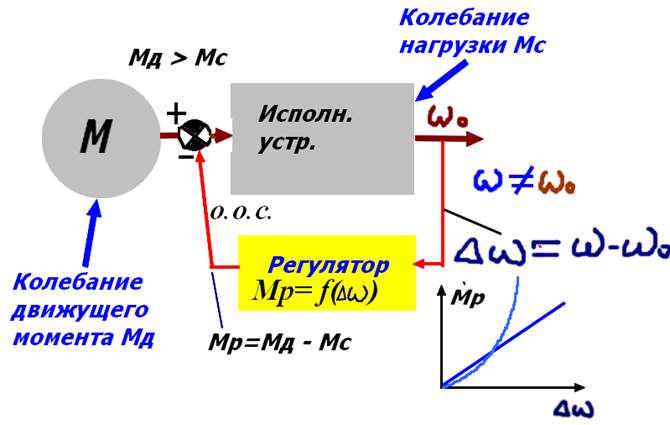
ТОРМОЗНЫЕ РЕГУЛЯТОРЫ При отсутствии регулятора скорости рабочий валик системы будет иметь постоянную угловую скорость w только в том случае, если момент движущих сил Мд будет все время равен моменту сил сопротивления Мс. Если бы Мд = Мс, то скорость w была бы постоянна!!! Однако в действительности такого не бывает. МД и Мс изменяются во времени !! Для обеспечения стабилизации скорости движения механизм проектируют так, чтобы имело место неравенство МД > Мс, а для получения равенства этих моментов ставится тормозной регулятор скорости, создающий дополнительный момент сопротивления Мр, который меняется в зависимости от изменения скорости движения и тем самым дает возможность получить необходимое равенство моментов. Необходимый момент сопротивления регулятора Мр = Мд - Мс. Момент движущих сил Мд чаще всего создается электрическим, пружинным двигателем, а иногда и падающим грузом (гиря на гибкой нити). Способы преобразование излишней механической энергии в тепло за счет трения, тормозные регуляторы делят на: · регуляторы с трением между твердыми телами; · регуляторы с трением о воздух или жидкость; · регуляторы с торможением вихревыми токами (магнитоиндукционные).
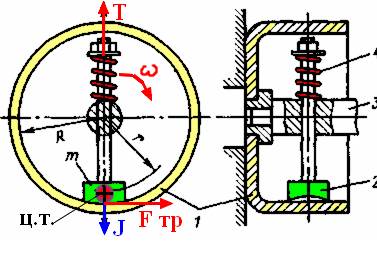
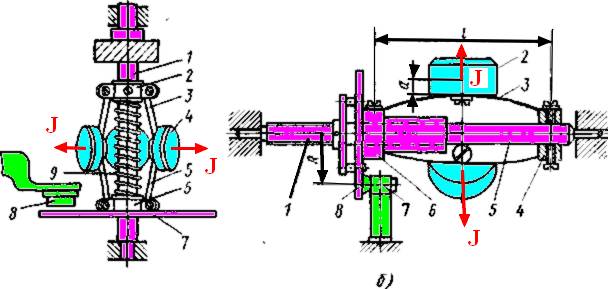
Регуляторы с трением между твердыми телами Действие регуляторов этого типа основано на трении между поверхностями их деталей. При увеличении скорости вращения вала регулятора w увеличивается сила сопротивления между трущимися поверхностями. Для этого используют действие центробежной силы, которая увеличивается пропор ционально квадрату скорости вращения w 2. Такие регуляторы часто называют центробежными. В зависимости от направления силы давления, вызывающей торможение, регуляторы этого типа делят на регуляторы радиаль ного и осевого действия. Регуляторы радиального действия. Простейший регулятор радиального действия (рис. 1, а) состоит из неподвижного тормозного барабана 1, вращающегося валика 3, в который вставлен тормозной башмак 2 с винтовой пружиной сжатия 4. Усилие Т Рис. 1. Регуляторы радиального действия
Сила инерции пружины регулируется гайкой. При небольших оборотах валика 3 регулятора усилие пружины Т больше центробежной силы J , башмак 2 не касается барабана, и регулятор не работает. При увеличении угловой скорости выше расчетной сила инерции быстро увеличивается и становится больше усилия пружины. За счет разности этих сил J — Т башмак прижимается к неподвижному барабану, и начинается торможение.
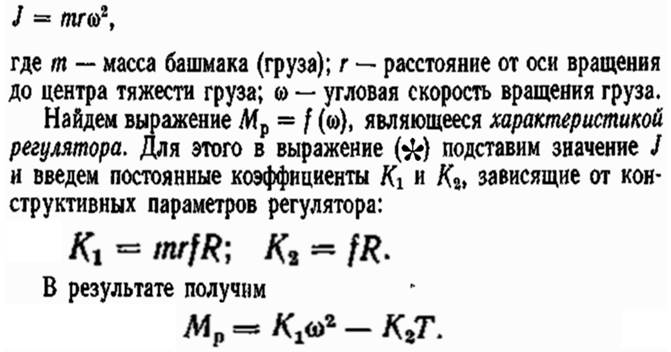
Тормозной момент регулятора
где R — внутренний радиус барабана; f — коэффициент трения между башмаком и барабаном. Сила центробежная
Из этого уравнения видно, что характеристика регулятора с пружиной сжатия имеет квадратичную зависимость от угловой скорости. Изменяя усилие пружины Т, можно получить необходимое значение w 0.
На рис. 1, б показана конструкция регулятора с колодками на рычагах, применяемого в различных приборах и машинах. Тормозной барабан 2 регулятора установлен непосредственно на корпусе электродвигателя. На валу 3 двигателя закреплен рычаг 4 с двумя инерционными грузами 1, свободно вращающимися на осях О. В исходном положении грузы удерживаются двумя пружинами 5.
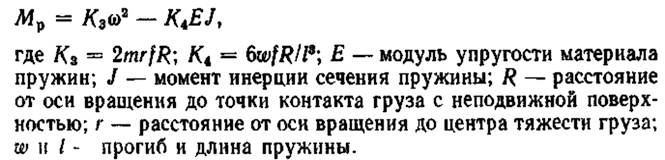
Регулятор с плоскими пружинами показан на рис. 1, в. На его валике 1 жестко закреплена втулка 2 с двумя плоскими пружинами 3, несущими на концах грузики 4. Тормозной момент создается за счет трения грузиков о чашку 5. Уравнение характеристики регулятора
а) Рис. 2. Регуляторы осевого действия Рис. 4. Регуляторы с трением о воздух с переменным размахом крыльев.
Для получения достаточно высокой угловой скорости вращения валика 1 движение от двигателя передается через несамотормозящуюся червячную передачу 2. Ось 3, вокруг которой могут поворачиваться лопасти крыльчатки, закреплена неподвижно на оси регулятора. Пружина 4 прижимает лопасти к упору и препятствует их вращению вокруг оси 3. До некоторой скорости w к регулятор работает, как регулятор с постоянным размахом крыльев. При дальнейшем увеличении угловой скорости силы инерции лопастей преодолевают усилие Т пружины, и лопасти начинают поворачиваться, создавая тем самым дополнительное сопротивление. Характеристика регулятора становится более жесткой (кривая 2 на рис. 4, в), что повышает точность регулирования угловой скорости вращения оси регулятора.
На рис. показан тормозной регулятор, состоящий из широкой плоской спиральной пружины, плотно намотанной на ось вращения регулятора. При вращении оси в направлении навивки пружина начинает раскручиваться под действием центробежных сил, захватывает воздух и тем самым осуществляет торможение.
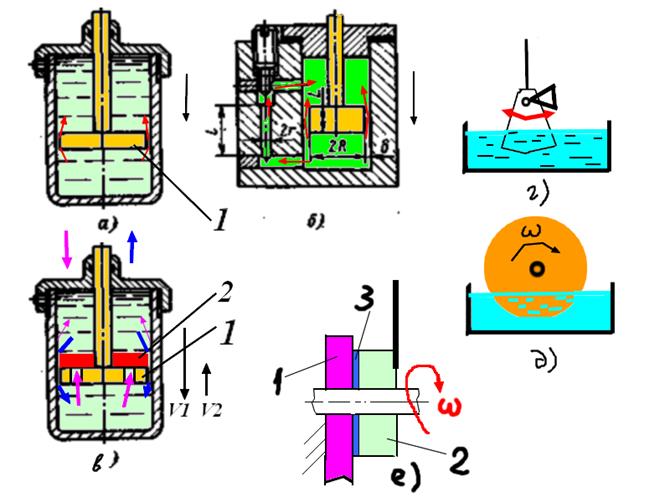
Рис. 5. Регуляторы с трением о жидкость
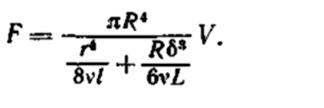
Торможение осуществляется за счет внутреннего трения между частицами жидкости и трения жидкости о стенки сосуда и поршня. При прямолинейном движении штока регулятора его тормозящее действие определяется не тормозным моментом, а тормозным усилием F , которое может быть постоянным по величине и регулируемым. На рис. 5, а показан поршневой регулятор с постоянной силой торможения
где v — коэффициент вязкости жидкости; R и L — радиус и высота поршня; d — зазор между поршнем и внутренней стенкой цилиндра (рис. 5, б); V — скорость поршня. Поршневой регулятор с регулируемой силой торможения r изображен на рис. 5, б. Верхняя и нижняя части рабочего цилиндра соединены между собой обводным каналом, средняя часть которого (капилляр, дроссель) имеет небольшое отверстие радиусом г и длиной l. Тормозное усилие регулируется путем изменения проходного сечения за счет перемещения регулировочного винта. При полностью ввернутом винте отверстие радиуса r перекрывается, циркуляция жидкости по обводному каналу прекращается, и регулятор работает аналогично показанному на рис. 5, а. Сила торможения у регулятора с обводным каналом
В качестве тормозной жидкости используют воду, масло, глицерин. Недостатком поршневых регуляторов является зависимость от температуры вязкости жидкости, ограничение пространственного расположения жидкостного регулятора. На рис 5,в показана модификация схемы а), когда на поршне 1 свободно устанавливается «шайба» 2 массой m. При движении поршня вверх система работает также как и регулятор по схеме а). При движении вниз жидкость проходит через зазор цилиндр-поршень и через отверстия в поршне, поднимая, создаваемой подъемной силой, шайбу 2. сопротивление (сила торможения F) меньше - скорость v2 больше.
Рис 5. г)и д). Лопасть и диск, связанные со звеном, у которого регулируют угловую скорость, погружены в жидкость. Вязкое трение создает момент торможения Мр.
Рис.5. е) В кинематическую пару вращательного движения помещают специальную смазку с большой вязкостью 3. При движении подвижной части 2 возникает момент сопротивления Мр.
СПУСКОВЫЕ РЕГУЛЯТОРЫ В спусковых регуляторах стабилизация скорости вращения, в отличие от тормозных регуляторов, осуществляется не непрерывно, а прерывисто с периодическими остановками рабочего валика. Спусковой регулятор состоит из двух частей—спуска, Или хода, и регулятора колебаний. По первой из них и получила свое название эта труппа регуляторов. Спуск (ход) состоит из качающегося рычага (анкера) 1 и зубчатого (анкерного или ходового) колеса 2 (рис. 6; 7, а). Регулятор колебаний представляет собой колебательную систему, обеспечивающую периодическую и строго одинаковую по времени остановку регулируемого валика. В зависимости от типа регулятора колебаний спусковые регуляторы делят на регуляторы с собственными колебаниями и регуляторы без собственных колебаний. Последние по конструкции более простые, но постоянство скорости вращения рабочего валика механизма поддерживают с меньшей точностью, чем первые.
На регуляторы с собственными колебаниями все время действует сила, возвращающая их в исходное положение. Конструктивно они выполняются в виде маятника 3 (рис. 6, а), где возвращающей силой является его вес или вес системы баланс — спираль (рис. 6,6). Баланс 4 представляет собой статически и динамически уравновешенное кольцо, на которое действует возвращающая сила спиральной пружины 5.
Регулятор без собственных колебаний (рис. 7, а) представляет собой баланс 3, жестко связанный с анкером 1 и уравновешенный инерционными грузиками 4. Регулятор колебаний периодически останавливает вращение рабочего валика механизма на некоторый период времени Т, поэтому постоянство скорости вращения можно получить только за интервал времени, значительно превосходящий период колебания регулятора. Ввиду периодических остановок рабочего валика спусковые регуляторы скорости применяют только в механизмах, передающих небольшие моменты и угловые скорости. Регуляторы с собственными колебаниями. В зависимости от конструкции регулятора колебаний применяют тот или иной ход. В спусковых регуляторах с маятником используют несвободный ход, когда анкер 1 (рис. 6, а) жестко связан с маятником 3 и вместе с ним качается вокруг оси О. Анкерное колесо 2 приводится в движение от двигателя механизма. Входная палетта 4 и выходная 5 поочередно вступают в контакт с зубьями анкерного колеса и периодически задерживают его движение. Лишь при прохождении маятника через положение равновесия он дает возможность анкерному колесу повернуться на один зуб. Колесо при повороте сообщает колебательной системе толчок (импульс энергии), необходимый для поддержания строго определенного периода колебаний маятника. Период собственных колебаний маятника при амплитуде качания 1,5—2° где J и т — момент инерции и масса маятника; l — расстояние от точки подвеса до центра тяжести маятника. Угловая скорость вращения анкерного (ходового) колеса
где 2 — число зубьев анкерного колеса; обычно z = 15. Спусковой регулятор с маятником должен находиться в строго вертикальном положении, поэтому его применяют в стационарных приборах, главным образом в приборах времени. Для переносных приборов, где спусковой регулятор может занимать любое положение в пространстве, используют регулятор с системой баланс—спираль, имеющей свободный ход. В этом случае анкер 1 (рис. 6, б) с регулятором скорости, состоящим из баланса 4 (уравновешенного массивного колесика) и спиральной пружины 5 (волоска), жестко не связан. Система баланс—спираль при своем колебании бывает кинематически связана с анкером 1 и анкерным колесом 2 в течение небольшой части периода колебания — при переброске анкерной вилки из одного крайнего положения в другое импульсным камнем 6, жестко закрепленным на балансе. Спиральная пружина одним концом крепится на балансе, а другим — на неподвижной плате механизма. Наличие свободного хода дает возможность уменьшить потери на трение, а также увеличить кинетическую энергию баланса и скорость его колебания за счет увеличения угла поворота баланса до 300°.
Рис. 7. Спусковые регуляторы без собственных колебаний Период где J — момент инерции баланса; L — длина спиральной пружины (волоска); b и h — ширина и толщина пружины; Е — модуль упругости материала пружины. Угловая скорость вращения анкерного или ходового колеса определяется по формуле:
Период собственных колебаний у маятников регулируется путем перемещения его линзы вдоль стержня (изменяется l), у системы баланс—спираль—изменением рабочей длины L волоска с помощью специального устройства. Спусковые регуляторы с собственными колебаниями обеспечивают высокую точность регулирования заданной угловой скорости. Так, погрешность хода обычных часов составляет ±(30—-60) с в сутки, а у весьма точных (астрономических) ±0,001 с. Спусковые регуляторы этого типа широко применяют в различных приборах времени, точных самописцах, счетчиках, реле, автоматических устройствах и т. д. ТОРМОЗНЫЕ РЕГУЛЯТОРЫ При отсутствии регулятора скорости рабочий валик системы будет иметь постоянную угловую скорость w только в том случае, если момент движущих сил Мд будет все время равен моменту сил сопротивления Мс. Если бы Мд = Мс, то скорость w была бы постоянна!!! Однако в действительности такого не бывает. МД и Мс изменяются во времени !! Для обеспечения стабилизации скорости движения механизм проектируют так, чтобы имело место неравенство МД > Мс, а для получения равенства этих моментов ставится тормозной регулятор скорости, создающий дополнительный момент сопротивления Мр, который меняется в зависимости от изменения скорости движения и тем самым дает возможность получить необходимое равенство моментов. Необходимый момент сопротивления регулятора Мр = Мд - Мс. Момент движущих сил Мд чаще всего создается электрическим, пружинным двигателем, а иногда и падающим грузом (гиря на гибкой нити). Способы преобразование излишней механической энергии в тепло за счет трения, тормозные регуляторы делят на: · регуляторы с трением между твердыми телами; · регуляторы с трением о воздух или жидкость; · регуляторы с торможением вихревыми токами (магнитоиндукционные).
Регуляторы с трением между твердыми телами Действие регуляторов этого типа основано на трении между поверхностями их деталей. При увеличении скорости вращения вала регулятора w увеличивается сила сопротивления между трущимися поверхностями. Для этого используют действие центробежной силы, которая увеличивается пропор ционально квадрату скорости вращения w 2. Такие регуляторы часто называют центробежными. В зависимости от направления силы давления, вызывающей торможение, регуляторы этого типа делят на регуляторы радиаль ного и осевого действия. Регуляторы радиального действия. Простейший регулятор радиального действия (рис. 1, а) состоит из неподвижного тормозного барабана 1, вращающегося валика 3, в который вставлен тормозной башмак 2 с винтовой пружиной сжатия 4. Усилие Т Рис. 1. Регуляторы радиального действия
Сила инерции пружины регулируется гайкой. При небольших оборотах валика 3 регулятора усилие пружины Т больше центробежной силы J , башмак 2 не касается барабана, и регулятор не работает. При увеличении угловой скорости выше расчетной сила инерции быстро увеличивается и становится больше усилия пружины. За счет разности этих сил J — Т башмак прижимается к неподвижному барабану, и начинается торможение.
Тормозной момент регулятора
где R — внутренний радиус барабана; f — коэффициент трения между башмаком и барабаном. Сила центробежная
Из этого уравнения видно, что характеристика регулятора с пружиной сжатия имеет квадратичную зависимость от угловой скорости. Изменяя усилие пружины Т, можно получить необходимое значение w 0.
На рис. 1, б показана конструкция регулятора с колодками на рычагах, применяемого в различных приборах и машинах. Тормозной барабан 2 регулятора установлен непосредственно на корпусе электродвигателя. На валу 3 двигателя закреплен рычаг 4 с двумя инерционными грузами 1, свободно вращающимися на осях О. В исходном положении грузы удерживаются двумя пружинами 5.
Регулятор с плоскими пружинами показан на рис. 1, в. На его валике 1 жестко закреплена втулка 2 с двумя плоскими пружинами 3, несущими на концах грузики 4. Тормозной момент создается за счет трения грузиков о чашку 5. Уравнение характеристики регулятора
а) Рис. 2. Регуляторы осевого действия |
Последнее изменение этой страницы: 2019-03-22; Просмотров: 277; Нарушение авторского права страницы

 (*)
(*)


 собственных колебаний системы баланс—спираль
собственных колебаний системы баланс—спираль