|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Тема 10. Частные задачи расхождения
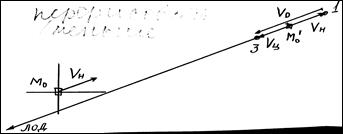
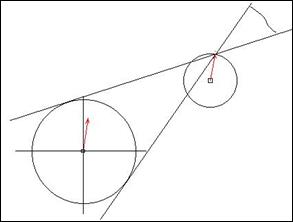
Маневрирование при обгоне, на контркурсах Эхо-сигнал перемещается по линии, параллельной курсовой черте нашего судна т.е. ЛОДêê Кн. 1 случай – относительная скорость равна сумме скоростей нашего судна и судна цели.( Vот = Vн + Vц) .
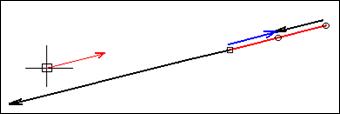
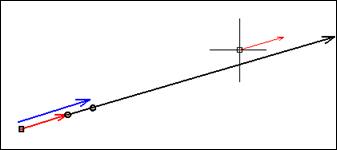
Рисунок.10. Маневрирование при обгоне Рисунок.11. Эхо-сигнал обгоняющего судна. 2 случай – Относительная скорость равна разности скоростей нашего судна и судна-цели.( Vот = Vн - Vц) 3 случай – относительная скорость равна разности скоростей судна-цели и нашего судна. ( Vот = Vц - Vн) 4 случай – Относительная скорость равна скорости нашего судна.
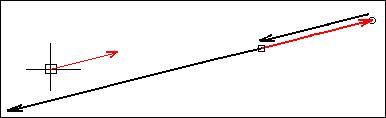
Рисунок.12.Эхо-сигнал судна, не имеющего хода относительно воды. Все случаи перемещений эхо-сигналов первого вида характеризуются следующими простыми закономерностями: а) При изменении скоростей судов параллельность перемещения эхо-сигналов курсовой черте сохраняется. б) При изменении курса нашего судна след послесвечения разворачивается для наблюдателя в сторону, противоположную повороту. в) Эхо-сигнал от неподвижной цели всегда перемещается параллельно нашего курса при всех его изменениях. Если, при неизменных курсе и скорости нашего судна, эхо-сигнал неподвижной цели начал перемещаться не параллельно нашей курсовой черте, это указывает на начало движения цели курсом, не параллельным нашему.
Рисунок.13. Эхо – сигнал догоняемого судна. МБР с судном-сателлитом Признаком судна – сателлита является постоянство П и Д на цель. Т.е. т.1,2,3 совпадают в одной точке.
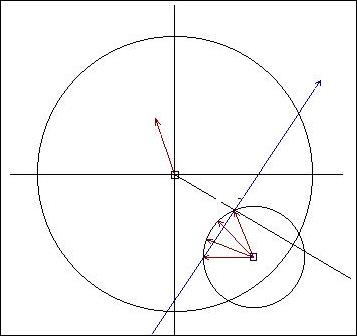
Рисунок.14. судно сателлит на носовых КУ. Рассмотрим судно – сателлит на носовых КУ на дистанции более заданной, т.е. Д >Дзад. В соответствии с методикой расчета МБР при т.1 строим вектор Vн и проводим окружность. Наносим т.4, которая будет совпадать с т.1. Из т.4 проводим касательные к окружности Дзад и строим СООК. Видно, что конец вектора Vн не находится в СООК и при любом нашем повороте конец Vн не попадает в СООК. ВЫВОД: При расхождении с судном – сателлитом, находящемся на носовых КУ, можно маневрировать в любую сторону. 2. Рассмотрим судно – сателлит на траверзных КУ на Д>Дзад.
Рисунок.15. судно-сателлит позади траверза. В соответствии с методикой проводим касательные к Дзад и строим СООК. Видно, что одна из границ СООК отсекает сегмент у окружности Vн, который показывает, что при повороте нашего судна в сторону судна – сателлита, конец Vн попадает в сегмент, что приведет к сокращению дистанции на величину менее Дзад. Правило 19(d) МППСС-72 не рекомендует поворачивать в сторону цели, находящейся на траверзных КУ. ВЫВОД: Для расхождения с судном – сателлитом, находящемся на траверзных КУ возможны маневры: а) поворот от судна – сателлита, б) уменьшение своей скорости. 3. Рассмотрим судно-сателлит на кормовых КУ на Д>Дзад. В соответствии с методикой расчета МБР проводим касательные к окружности Дзад и строим СООК. Одна из границ СООК отсекает еще больший сегмент у окружности Vн, который говорит, что при повороте нашего судна в сторону судна-сателлита произойдет сокращение дистанции на величину менее Дзад. Правило 19(d) МППСС-72 не рекомендует поворачивать в сторону цели, находящейся на кормовых КУ. ВЫВОД: Для расхождения с судном-сателлитом, находящемся на кормовых КУ, возможны маневры: а) поворот от судна-сателлита; б) уменьшение нашей скорости, при условии, что линия ИКц не заходит в опасную зону. При выходе из узкости или при других обстоятельствах складывается ситуация, когда судно-сателлит находится внутри опасной зоны, то есть Д<Дзад. 4. Рассмотрим судно-сателлит на носовых КУ на Д<Дзад.
Рисунок.16. судно-сателлит в Дзад впереди траверза. МБР необходимо рассчитать так, чтобы в процессе расхождения имеющаяся дистанция не сокращалась. Для этого проводим ИП на цель. В т.1 проводим линию, перпендикулярную ИП, которая будет являться ОЛОДом и линией СО одновременно (так как т.3 и т.4 совпадают). Мы можем назначить любой Кнн ,но необходимо дать соответствующую ему Vнн, ,так чтобы вектор Vнн не пересекал линию СО. Тем самым будет обеспечено расхождение с судном-сателитом без сокращения имеемой дистанции. Рассмотрим судно-сателлит на кормовых КУ на Д<Дзад. Для расчета МБР проводим ИП на цель. В т.1 проводим линию, перпендикулярную ИП, которая будет являться ОЛОДом и линией СО одновременно. Если назначить Кнн и дать соответствующую ему Vнн, или назначить Vнн и лечь на соответствующий ей Кнн так, чтобы вектор Vнн пересекал или хотя бы коснулся линии СО, то тем самым будет обеспечено расхождение с судном-сателлитом без сокращения имеемой дистанции.
Рисунок.16. судно-сателлит в Дзад позади траверза. Суда – сателлиты, находящиеся на траверзных и кормовых КУ являются потенциально опасными судами. Вопросы для самоконтроля: 1. Как выглядит ЛОД догоняющей цели? 2. Как выглядит ЛОД судна не имеющего хода относительно воды? 3. Что такое судно сателлит? 4. Является ли судно сателлит опасной целью если находиться впереди траверза? 5. Каким образом рассчитывается маневр расхождения с судном-сателлитом если таковое находиться в Дзад? 6. Приемлемо уменьшение хода для расхождения с сателлитом? Если да то в каких случаях? 7. Можно ли использовать метод хорд для расхождения с сателитом? 8. Как определяется время расхождения с сателитом? Рекомендуемая литература [2,3,7, 8,13,15,22]. Тема 11. Требования к использованию РЛС. При работе с САРП судоводитель освобожден от механически рутинных операций: съема и обработки радиолокационных пеленгов и дистанций. Это позволяет сосредоточить внимание на наиболее ответственных функциях - непрерывном квалифицированном наблюдении, оценки навигационной ситуации, выборе и выполнении оптимального маневра для обеспечения безопасного расхождения и плавания судна по заданному маршруту. При этом САРП рассматривается лишь в качестве датчика навигационной информации, необходимой для успешного расхождения с целями, но не как система предупреждения столкновений, чем подчеркивается ведущая роль судоводителя в обеспечении безопасности мореплавания. Принципиально новая для судовождения система радиолокатор-компьютер-человек создает определенные проблемы при эксплуатации САРП и связанные с этим опасности неграмотного или неквалифицированного использования САРП ИМО особо отмечает, что САРП с низкими технико-эксплуатационными характеРисуноктиками или обслуживаемые недостаточно обученным персоналом могут нанести ущерб безопасности мореплавания. Ассамблея ИМО в своей Резолюции А.422 (XI) рекомендовала правительствам стран-членов ИМО обеспечить надлежащее обучение капитанов, старших помощников и помощников капитана, несущих ходовую вахту, правильному использованию САРП с тем, чтобы судоводители понимали основные принципы применения этих средств, их возможности, ограничения и погрешности. Каждый капитан, старший помощник и помощник капитана, несущий ходовую вахту на судне, на котором установлено САРП, должен пройти соответствующий курс обучения (включая тренажерное) по использованию САРП. Минимальные требования по обучению методам использования САРП сформулированные в Резолюции ИМО А.482(12) от 19 ноября 1981 г. и рассматриваются как дополнение к главе - 11 Международной Конвенции о подготовке и дипломировании моряков и несении вахты 1978 г. Согласно Резолюции А.482(12) капитаны, старшие помощники и помощники капитана, несущие ходовую вахту, должны · уметь оценить риск передоверия данным САРП; · знать основные типы САРП и характеристики их индикаторов; требования ИМО к технико-эксплуатационным характеристикам САРП; факторы, влияющие на работу САРП и его точность; возможности САРП и его ограничения; задержки в обработке радиолокационной информации; · знать и уметь продемонстрировать: · правила включения и настройки индикаторов САРП; · правила использования предупредительной сигнализации, ее достоинства и недостатки; · правила проверки функционирования САРП; принципы использования информации в режимах истинного и относительного движения, включая идентификацию опасных эхо-сигналов. Применение запретных зон в режиме автозахвата, относительный курс и скорость целей, время и дистанцию кратчайшего сближения, курс и скорость целей, определение изменения курса и скорости цели и ограничения, свойственные этой информации, влияние изменения элементов движения собственного судна и проигрывание маневра; · методику ручного и автоматического захвата целей и связанных с ними истинного и относительного движения; · типовое графическое представление информации о цели и ее опасной зоне; · использование информации о следах сопровождаемых целей; · применение Международных правил предупреждения столкновений судов в море. Только четкое и ясное представление об эффективном совместном использовании возможностей человека и техники является фундаментом для достижения основной цели обучения - овладения профессиональными знаниями и навыками, обеспечивающими безопасное судовождение в любых условиях плавания. По выражению английских специалистов, хорошего судоводителя САРП делает еще лучше, плохого - еще хуже. САРП не решает задачу предупреждения столкновений судов, а лишь обеспечивает судоводителя необходимой для этого информацией, которую необходимо грамотно анализировать и эффективно использовать. Поэтому и обучение судоводителей методам работы с САРП не должно сводиться к изучению только технической стороны вопроса (управлению прибором). Особое внимание необходимо уделять самому слабому участку в обработке информации - анализу ситуации судоводителем с использованием данных САРП, грамотному обоснованию принимаемого решения с учетом международных и отечественных документов по безопасности мореплавания (в частности, МППСС-72) и требований хорошей морской практики. Успешное освоение САРП как технического устройства должно обеспечивать способность судоводителя квалифицированно осуществлять выбор режимов наблюдения, использование графической (в том числе векторной) и буквенно-цифровой информации, надлежащее использование оперативной и предупредительной аппаратурной сигнализации. Захват и сопровождение опасных целей, очистку индикатора САРП от ненужной информации, снятие и использование данных по сопровождаемым целям для принятия решения о действии, выполнение маневра для избежания чрезмерного сближения с другими судами с последующим контролем за его результатом. Необходимо также четко представлять опасность передоверия принятия решения режиму автоматического захвата и сопровождения целей и не полагаться полностью на показания САРП при выдаче предупредительной сигнализации. Вопросы для самоконтроля: 1. Что является причиной создания САРП? 2. Является ли САРП системой предупреждения столкновений судов? 3. Перечислите минимальны требования по безопасному использованию САРП. 4. Решает ли САРП задачу предотвращения столкновения судов 5. Что означает передоверие САРП? Рекомендуемая литература [3,6,7,8,9,17].
|
Последнее изменение этой страницы: 2019-03-20; Просмотров: 1593; Нарушение авторского права страницы