
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамический синтез кулачковых механизмовСтр 1 из 3Следующая ⇒
Динамический синтез кулачковых механизмов Методические указания по выполнению курсовой работы (проекта) по теории механизмов и машин для студентов дневного и заочного отделений
Ростов-на-Дону 2006
Составители: канд. техн. наук, доц. В.А.Кочетов канд. техн. наук, доц. М.В.Савенков ст. препод. В.С. Цандеков
УДК 621.835 (07)
Методические указания по выполнению курсовой работы (проекта) по теории механизмов и машин для студентов дневного и заочного отделений – Ростов н/Д: Издательский центр ДГТУ, 2006. – 19с.
Печатается по решению методической комиссии конструкторского факультета
Научный редактор д.т.н., проф. В.П.Жаров
© Издательский центр ДГТУ, 2006.
Исходные данные для проектирования. Целью работы является построение профиля кулачка в соответствии с исходными данными. Исходными данными при профилировании являются: 1. Схема кулачкового механизма, которая может быть представлена одной из схем, изображенных на рис.1. 2. Фазовые углы кулачка: 3. Ход толкателя: H(мм) для схем ( рис. 1, а, б); 4. Минимальный угол передачи движения 5. Число оборотов кулачка n , об/мин. 6. Направление вращения кулачка. 7. Эксцентриситет для схемы (см. рис. 1,а)
8. Длина коромысла l для схемы (см. рис. 1 в) 9. Диаграмма движения толкателя Содержание и порядок выполнения расчетов и построений Построение диаграммы движения выходного звена кулачкового механизма ( толкателя или коромысла) Построение диаграмм проводится на основании заданной диаграммы аналога ускорения толкателя Для построения заданной диаграммы
Задаются максимальной ординатой диаграммы на угле удаления или угле возвращения, удобнее задаваться ординатой на том угле, который больше. Величину ординаты следует принимать в пределах
Разбивается угол удаления и угол возвращения на одинаковое, четное число интервалов интегрирования, обычно 8-12, и строится исходная диаграмма. При построении необходимо учитывать следующее (см. рис. 2): а) для законов, А и В точки максимума и минимума ускорений должны соответствовать концам интервалов интегрирования, т.е. число интервалов по оси б) для закона Д наклонные участкам графика должно соответствовать целое число интервалов интегрирования; в) для законов А и Б построение графика аналога ускорения проводится методами, известными из курса технического черчения. Построение диаграммы аналога скорости Для этого: а) строятся ординаты ab , cd , …., соответствующие серединам интервалов интегрирования 01,12,..., и откладываются на оси ординат отрезки оb' = ab ,оd' = cd и т.д. (см. рис. 3а);
б) на продолжении оси j выбирается полюс в) на рис. 3б из точки 0 проводится отрезок Оb'' в интервале 0-1 параллельно лучу Полученная ломаная (в пределе - кривая) является графиком аналога скорости. Проводя аналогичное интегрирование графика
3.2 Вычисление масштабов диаграмм
Все три диаграммы построены в неопределенных масштабах. Их масштабы определяются по заданным значениям хода толкателя или угла поворота коромысла
где Масштабы диаграммы аналога скорости толкателя и угловой скорости коромысла:
где Масштабы диаграмм аналога ускорений:
Определяется угловая скорость кулачка
где
3.3.Определение минимального радиуса кулачка. Минимальный радиус кулачка определяется графическим путем. Рассмотрим определение Профилирование кулачка Построение профиля кулачка проводится графическим путем. При профилировании используется метод обращения движения: всем звеньям механизма сообщается новая угловая скорость - Ниже приведено профилирование кулачковых механизмов различных типов.
4.1. Кулачковый механизм с роликовым центральным поступательно перемещающимся толкателем. 1. Из выбранного центра вращения кулачка проводится окружность радиусом 2. Откладывается ход толкателя H в масштабе 3. Определяется текущее перемещение толкателя в масштабе 4. Проводится дуга радиусам ( 5. Засечками по дугам окружностей проектируются все текущие точки перемещения толкателя на соответствующие им по номеру лучи. 6. Найденные на лучах точки соединяются плавной линией. На участке 7.Определяется величина радиуса ролика из следующих соотношений:
Минимальный радиус кривизны профиля определяется графически на участке профиля, соответствующем наибольшей кривизне (участок выбирается визуально). В выбранной точке проводится окружность радиусом r=15-20 мм, в точках пересечения этой окружности с профилем проводятся еще две окружности с тем же радиусом. Через точки пересечения этих двух окружностей с центральной окружностью проводятся две линии, пересекающиеся друг с другом в центре кривизны профиля, расстояние от центра центральной окружности до центра кривизны соответствует Окончательно радиус ролика 8. Для получения практического профиля кулачка необходимо построить огибающую дуг радиусом ролика 9. В случае пазового кулачка профиль паза строится, как огибающая окружностей радиуса ролика
Список рекомендуемой литературы 1. И.И. Артоболевский Теория механизмов и машин. М., Наука, 1996. 2. Теория механизмов и машин. Под ред. К.В.Фролова. М., Высшая школа, 2001. 3. Синтез кулачковых механизмов. Методические указания. – Ростов-на-Дону: РИСХМ, 1985.
Динамический синтез кулачковых механизмов Методические указания по выполнению курсовой работы (проекта) по теории механизмов и машин для студентов дневного и заочного отделений
Ростов-на-Дону 2006
Составители: канд. техн. наук, доц. В.А.Кочетов канд. техн. наук, доц. М.В.Савенков ст. препод. В.С. Цандеков
УДК 621.835 (07)
Методические указания по выполнению курсовой работы (проекта) по теории механизмов и машин для студентов дневного и заочного отделений – Ростов н/Д: Издательский центр ДГТУ, 2006. – 19с.
Печатается по решению методической комиссии конструкторского факультета
Научный редактор д.т.н., проф. В.П.Жаров
© Издательский центр ДГТУ, 2006.
|
Последнее изменение этой страницы: 2019-03-31; Просмотров: 335; Нарушение авторского права страницы
 - угол удаления;
- угол удаления; -угол дальнего выстоя/(стояния);
-угол дальнего выстоя/(стояния); - угол возвращения.
- угол возвращения. (град) для схемы (рис.1,в).
(град) для схемы (рис.1,в).

 или
или  (рис.2)
(рис.2) или 1[град/мм]. В принятом масштабе по оси углов откладываются отрезки, соответствующие углам удаления, дальнего стояния и возвращения (рис. З, а)
или 1[град/мм]. В принятом масштабе по оси углов откладываются отрезки, соответствующие углам удаления, дальнего стояния и возвращения (рис. З, а) ,
,  ,
,  .
. , причем больше значение h следует брать, если
, причем больше значение h следует брать, если  и
и  равны или близки по величине, и меньшее, если они сильно разнятся. Величина ординаты на втором угле определяется на основании соотношения:
равны или близки по величине, и меньшее, если они сильно разнятся. Величина ординаты на втором угле определяется на основании соотношения:
 должно быть кратным четырем;
должно быть кратным четырем; или
или  проводится графическим интегрированием диаграммы аналога ускорения.
проводится графическим интегрированием диаграммы аналога ускорения.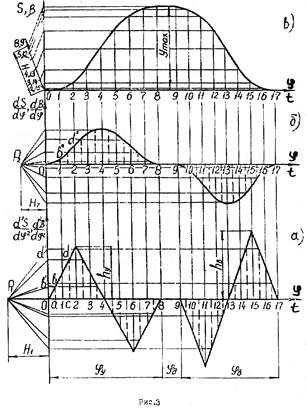
 и соединяется с точками b', d', ..., полюсное расстояние выбирается из условия, чтобы максимальная ордината графика
и соединяется с точками b', d', ..., полюсное расстояние выбирается из условия, чтобы максимальная ордината графика  =40-60 мм);
=40-60 мм); d' и т.д.
d' и т.д. или
или  , получаем диаграмму перемещений толкателя
, получаем диаграмму перемещений толкателя  или
или  (см. рис.3в).
(см. рис.3в). . Масштаб диаграммы определяется по выражениям:
. Масштаб диаграммы определяется по выражениям: ,
, 

 - максимальная ордината диаграммы перемещений толкателя или углов поворота коромысла (см. рис. 3в).
- максимальная ордината диаграммы перемещений толкателя или углов поворота коромысла (см. рис. 3в). ;
; ;
; - полюсное расстояние на рис. 3б.
- полюсное расстояние на рис. 3б.
 .
. , а затем вычисляются масштабы времени
, а затем вычисляются масштабы времени  , скорости толкателя
, скорости толкателя  , ускорения толкателя
, ускорения толкателя  или масштабы угловой скорости
или масштабы угловой скорости  и углового ускорения
и углового ускорения  коромысла, а также масштабы перемещений
коромысла, а также масштабы перемещений  , скорости
, скорости  и ускорения
и ускорения  центра ролика коромысла по формулам:
центра ролика коромысла по формулам: ;
; ;
; ;
; ;
; ;
; ;
; ;
; ,
, - длина коромысла, м.
- длина коромысла, м. для всех трех типов кулачковых механизмов.
для всех трех типов кулачковых механизмов. , в результате чего кулачок стоит на месте, а толкатель вращается вокруг него со скоростью
, в результате чего кулачок стоит на месте, а толкатель вращается вокруг него со скоростью  , который выбирается в зависимости от максимального размера изображения на чертеже, равного для случая кулачкового механизма с коромысловым толкателем
, который выбирается в зависимости от максимального размера изображения на чертеже, равного для случая кулачкового механизма с коромысловым толкателем  , для остальных типов кулачковых механизмов
, для остальных типов кулачковых механизмов  .
. и вертикальная осевая линия (рис. 7).
и вертикальная осевая линия (рис. 7). по вертикальной оси вверх от точки пересечения оси с окружностью радиусом
по вертикальной оси вверх от точки пересечения оси с окружностью радиусом  .
. и откладывается на вертикальной оси (см. рис. 7). Для этого проводится вспомогательное построение. От точки О (см.рис.5) проводится под острым углом к оси S наклонная линия, на ней откладывается ход толкателя Н в масштабе
и откладывается на вертикальной оси (см. рис. 7). Для этого проводится вспомогательное построение. От точки О (см.рис.5) проводится под острым углом к оси S наклонная линия, на ней откладывается ход толкателя Н в масштабе  проектируются на ось S , максимальная ордината соединяется с концом хода H на наклонной линии, остальные ординаты проектируются на наклонную линию параллельно верхней соединительной линии. Полученные деления переносятся на вертикальную ось (см. рис.7).
проектируются на ось S , максимальная ордината соединяется с концом хода H на наклонной линии, остальные ординаты проектируются на наклонную линию параллельно верхней соединительной линии. Полученные деления переносятся на вертикальную ось (см. рис.7). ) в пределах угла
) в пределах угла  в сторону, противоположную вращению кулачка, от оси откладываются углы профиля
в сторону, противоположную вращению кулачка, от оси откладываются углы профиля  ,
,  ,
,  . Углы
. Углы  ) на столько же делений, на сколько они были поделены на графиках, точки деления нумеруются по порядку и лучами соединяются с центром вращения кулачка.
) на столько же делений, на сколько они были поделены на графиках, точки деления нумеруются по порядку и лучами соединяются с центром вращения кулачка. ), на участке
), на участке  - по дуге
- по дуге  . Это теоретический профиль кулачка.
. Это теоретический профиль кулачка. ;
; .
. .
. устанавливается из конструктивных соображений, но не более указанных выше соотношений.
устанавливается из конструктивных соображений, но не более указанных выше соотношений. профиль описывается дугой радиуса (
профиль описывается дугой радиуса (  ), на участке
), на участке  ).
).