
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
КИНЕМАТИЧЕСКИЕ СХЕМЫ РЕДУКТОРОВ
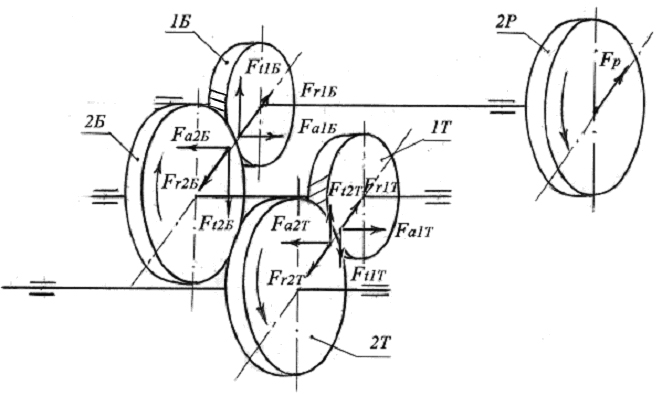
На рисунках 2, 3 и 4 представлены в аксонометрии кинематические схемы ряда широко распространенных двухступенчатых редукторов различной конструкции, имеющих также различный тип быстроходной передачи, звенья которой обозначены индексом «Б» (размещены ближе к электродвигателю), и тихоходную цилиндрическую косозубую передачу с индексом «Т». В качестве быстроходной ступени выступают следующие передачи: цилиндрическая косозубая, червячная и коническая (схема редуктора с ней не показана). В передачах индекс «1» относится к ведущему звену, а индекс «2» – к ведомому. На быстроходном валу на рисунке 3 установлен ведомый шкив гибкой (ременной) передачи, обозначенный индексом «2Р», а на тихоходном валу на рисунке 4 установлена ведущая звездочка гибкой (цепной) передачи с индексом «1Ц». В точке зацепления передач указаны относящиеся к соответствующим звеньям передачи силы, обозначенные совпадающими со звеньями индексами, а также силы на звеньях от действия гибких передач ( ПРИМЕРЫ РАСЧЕТА ВАЛОВ 3.1. Ведущий вал одноступенчатого червячного редуктора либо двухступенчатого с быстроходной червячной ступенью (рисунок 5) Исходные данные Крутящий момент на ведущем валу T1 = 77,68 Нм; передаточное число передачи u = 8; коэффициент диаметра червяка q = 12,5; модуль зацепления m = 6,3 мм; число витков червяка z1 = 4; число зубьев колеса z2 = 32; коэффициент смещения червячного колеса x = – 0,03; угол трения между червяком и колесом
Рисунок 2 – Кинематическая схема цилиндрического двухступенчатого соосного редуктора (входной 1Б и выходной 2Т валы находятся на одной оси) с силами в зацеплениях быстроходной (Б) и тихоходной (Т) передач на ведущих (1) и ведомых (2) звеньях
Рисунок 3 – Кинематическая схема цилиндрического двухступенчатого редуктора по развернутой схеме с силами в зацеплениях быстроходной (Б) и тихоходной (Т) передач на ведущих (1) и ведомых (2) звеньях, а также на ведомом шкиве (2Р) от действия ременной передачи
Рисунок 4 – Кинематическая схема червячно-цилиндрического редуктора с силами в зацеплениях быстроходной (Б) и тихоходной (Т) передач на ведущих (1) и ведомых (2) звеньях, а также на ведущей звездочке (1Ц) от действия цепной передачи Определим начальный диаметр червяка
и начальный диаметр колеса Определим силы в зацеплении: а) окружная сила на червяке (равная осевой силе на колесе
б) осевая сила на червяке (равная окружной силе на колесе
Примечание – При выполнении расчета червячной передачи на прочность вручную или с применением пакета программ для ЭВМ, разработанным на кафедре, геометрические характеристики и усилия в зацеплении находятся в результате расчета передачи, и вычислять их по приведенным выше формулам не требуется. Fp =1036 Н – консольная сила от действия гибкой передачи (ременной), которая также получается в результат расчета гибкой передачи. Направление силы Материал червяка – сталь 45 по ГОСТ 1950–88 улучшенная с механическими характеристиками (таблица А.2):
|
Последнее изменение этой страницы: 2019-03-31; Просмотров: 113; Нарушение авторского права страницы
 и
и  ). На рисунке 4 силы на промежуточном валу соответствуют кинематической схеме вала, представленной на странице 177 источника [5]. На рисунках 2 и 3 за счет выбора направления зубьев и вращения звеньев осевые силы на быстроходных
). На рисунке 4 силы на промежуточном валу соответствуют кинематической схеме вала, представленной на странице 177 источника [5]. На рисунках 2 и 3 за счет выбора направления зубьев и вращения звеньев осевые силы на быстроходных  и тихоходных
и тихоходных  валах направлены в сторону консоли, что соответствует худшему случаю эксплуатации входного подшипника.
валах направлены в сторону консоли, что соответствует худшему случаю эксплуатации входного подшипника. ; кпд передачи
; кпд передачи  ; кпд пары подшипников качения
; кпд пары подшипников качения  .
.

 мм
мм мм.
мм. )
) ;
; )
) в) радиальная сила на червяке (равная радиальной силе на колесе
в) радиальная сила на червяке (равная радиальной силе на колесе  )
) ,
, – крутящий момент на колесе;
– крутящий момент на колесе;  – угол исходного контура.
– угол исходного контура. принято в сторону консоли, что соответствует худшему случаю эксплуатации входного подшипника. Этот случай произойдет, если направление вращения ведущего звена 1Б (червяка) на рисунке 4 изменить на противоположное, при этом силы
принято в сторону консоли, что соответствует худшему случаю эксплуатации входного подшипника. Этот случай произойдет, если направление вращения ведущего звена 1Б (червяка) на рисунке 4 изменить на противоположное, при этом силы  и
и  также поменяют направление. Если теперь на это же звено поместить ведомый шкив ременной передачи аналогично рисунку 3 с соответствующим направлением силы
также поменяют направление. Если теперь на это же звено поместить ведомый шкив ременной передачи аналогично рисунку 3 с соответствующим направлением силы  , то получим расчетную схему вала на рисунке 5.
, то получим расчетную схему вала на рисунке 5. МПа;
МПа;  МПа;
МПа;  МПа;
МПа;  МПа;
МПа;  МПа.
МПа.