|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет упругих втулочно-пальцевых муфт (МУВП)
Эта муфта используется при необходимости гашения динамических нагрузок, возникающих в приводе и для компенсации несоосности (рис. 10.1).
Рис. 10.1. Муфта упругая втулочно-пальцевая: 1, 2 – полумуфты; 3 – палец; 4 – втулка упругая; 5 – шайба для пальцев; 6 – шайба стопорная с носком; 7 – гайка Проверочный расчет заключается в определении давления между пальцами и резиновыми втулками (набора резиновых колец) по напряжениям смятия
где Z – число пальцев; D1 – диаметр окружности расположения центров пальцев, мм; l – рабочая длина втулки (набора резиновых колец), мм; d п – диаметр пальцев под резиной, мм; [σсм] – допускаемое напряжение смятия для резиновых втулок, [σсм]=2–4 Н/мм2. Кроме этого пальцы муфты рассчитывают на изгиб
где Ft – окружная сила, определяемая как l1 – длина втулки, мм; W – момент сопротивления изгибу для сечения пальца Допускаемые напряжения
Расчет зубчатых муфт Данные муфты используются в тяжелонагруженных передачах для компенсации отклонения соединяемых валов привода от соосности (рис.10.2), подбираемые по ГОСТ 5006. После выбора муфты необходима проверка ее по условию ограничения износа зубьев.
Рис. 10.2. Зубчатая муфта Определяется давление q:
где b– длина зуба втулки, мм;
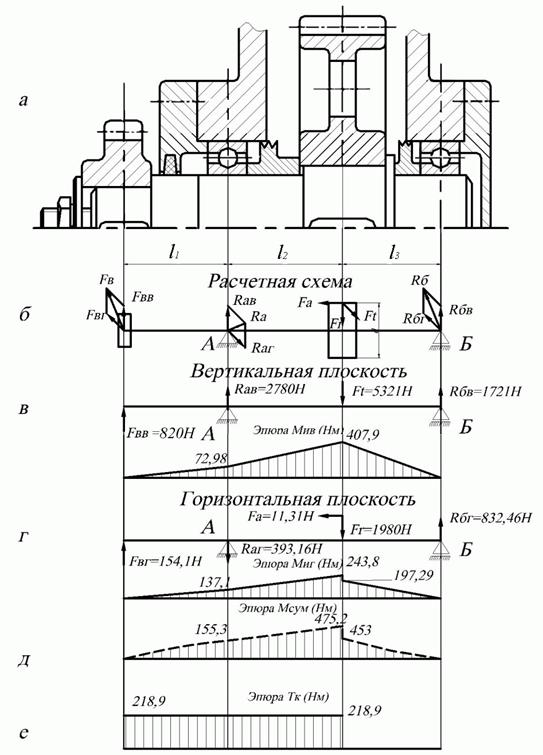
Z – число зубьев втулки; m – модуль зацепления, мм; [q] – допускаемое давление, обычно принимаемое равным [q] = 12–15 МПа. ПРОВЕРОЧНЫЕ РАСЧЕТЫ 11.1. Определение реакций в опорах валов и построение Для определения реакций в опорах вначале необходимо построить схему нагружения валов редуктора. Она выполняется на отдельном листе формата А4 и должна содержать название схемы, схему валов в изометрии с указанием всех сил, действующих на вал как от зубчатого зацепления в редукторе, так и от внешних передач направления вращения валов: координатную систему осей Х, Y, Z для ориентации схемы: таблицу силовых и кинематических параметров. При выборе направления сил и угловых скоростей необходимо руководствоваться следующими рекомендациями: вращение электродвигателя выбрать в соответствии с направлением вращения приводного вала рабочего органа привода; окружную силу на шестерне (червяке) Определение реакций в опорах и построение эпюр изгибающих и крутящих моментов для вала в сборе (рис.11.2, а) выполняется в следующей последовательности: 1. Выполняют схему нагружения вала с указанием действующих сил и расстояний между точками их приложения (берутся из компоновки, см. п. 9) (рис. 11.2, б). 2. Определяют точки приложения сил к валу и точки реакций опор по следующим рекомендациям:
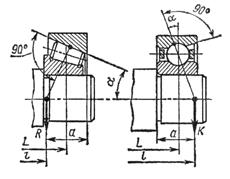
а) силы от передач (Fr , Ft , Fa , F в , F м) располагают по середине ступиц зубчатых колес, звездочек, шкивов и полумуфт; б) осевая сила в зацеплении прикладывается на делительном диаметре и создает сосредоточенный изгибающий момент; в) точки приложения реакций в опорах устанавливают в зависимости от типа подшипника. Для радиальных подшипников точка приложения реакции проходит через центр ширины подшипника. Для радиально-упорных подшипников следует иметь в виду, что точка приложения реакции находится в месте пересечения нормали к середине поверхности контакта тела качения с наружным кольцом и оси вала, т.е. на расстоянии для шариковых радиально-упорных подшипников
для роликовых радиально-упорных подшипников
где B – ширина колец подшипников, мм; Т – монтажная ширина роликовых радиально-упорных подшипников, мм; d – диаметр отверстия внутреннего кольца подшипника, мм; D – наружный диаметр наружного кольца подшипника, мм. Значения d, D, B, Т, e для радиально-упорных шарикоподшипников выбирают по ГОСТ 831 (приложение 1 табл. 2) и для роликовых конических подшипников по ГОСТ 333 (приложение 1 табл. 3). 3. Составляют схему нагружения вала в вертикальной плоскости (рис. 11.2, в), с учетом того, что окружная сила Ft, сила от муфты Fм и составляющая открытой передачи находятся в одной плоскости, а радиальная Fr, осевая Fa, и составляющая открытой передачи в другой. 4. По правилам сопротивления материалов, рассматривая вал как балку, лежащую на шарнирно-подвижных опорах и нагруженную сосредоточенными силами, определяют реакции в опорах в вертикальной плоскости и строят эпюры изгибающих моментов. При этом необходимо дать числовые значения моментов в опорах и точках приложения сил в предварительно выбранном масштабе (рис. 11.2, в). 5. Аналогичную схему нагружения вала, определение реакций опор и построение эпюр изгибающих моментов выполняют для горизонтальной плоскости (рис. 11.2, г).
Рис. 11.2. Расчетная схема вала 6. Определяют суммарные изгибающие моменты в наиболее нагруженных сечениях вала: 7. где МВ и МГ – соответственно, изгибающие моменты в вертикальной и горизонтальной плоскостях и строят эпюру изгибающих моментов (рис. 11.2, д ). 8. Строят эпюру крутящих моментов для вала (рис. 11.2, е). 9. Определяют суммарные радиальные реакции опор вала (например, где RAB и RA Г - соответственно реакции в опоре А в вертикальной и горизонтальной плоскостях). Рис. 11.3 |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 114; Нарушение авторского права страницы

 ,
, ,
, ;
; .
. .
. - предел текучести материала пальца.
- предел текучести материала пальца.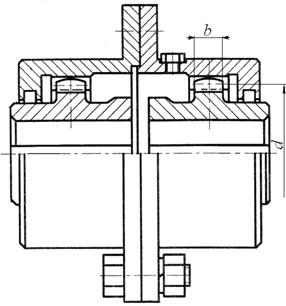
 ,
, – диаметр делительной окружности, мм;
– диаметр делительной окружности, мм; направлять противоположно направлению вращения вала, а на колесе
направлять противоположно направлению вращения вала, а на колесе  - по направлению вращения; радиальная сила Fr лежащая в плоскости валов, направляется из точки зацепления к оси вала; силу от муфты
- по направлению вращения; радиальная сила Fr лежащая в плоскости валов, направляется из точки зацепления к оси вала; силу от муфты  направить противоположно окружной силе в зацеплении
направить противоположно окружной силе в зацеплении  ; силы от открытых передач (ременной, цепной, зубчатой) направляются в зависимости от их расположения в кинематической схеме привода (если проектным заданием предусмотрено наклонное положение передач более 30º, то внешнюю силу нужно разложить на вертикальную и горизонтальную составляющие). Если на вал действует несколько осевых сил Fa, то необходимо принимать направление зубьев колес или витков червяка таким, чтобы эти силы взаимно уравновешивались. На рис. 11.1 приведены примеры составления схем нагружения валов: червячной передачи рис. 11.1, а, конической рис. 11.1, б и цилиндрической косозубой рис. 11.1, в.
; силы от открытых передач (ременной, цепной, зубчатой) направляются в зависимости от их расположения в кинематической схеме привода (если проектным заданием предусмотрено наклонное положение передач более 30º, то внешнюю силу нужно разложить на вертикальную и горизонтальную составляющие). Если на вал действует несколько осевых сил Fa, то необходимо принимать направление зубьев колес или витков червяка таким, чтобы эти силы взаимно уравновешивались. На рис. 11.1 приведены примеры составления схем нагружения валов: червячной передачи рис. 11.1, а, конической рис. 11.1, б и цилиндрической косозубой рис. 11.1, в.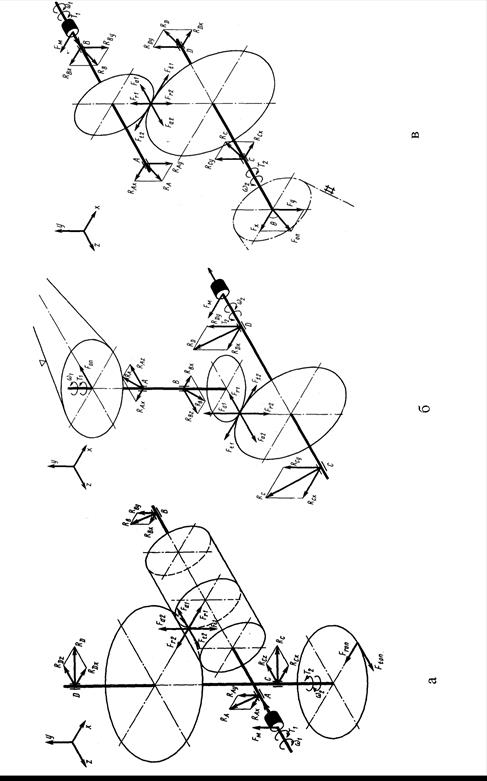
 от торца кольца подшипника (рис. 11.3). Расстояние
от торца кольца подшипника (рис. 11.3). Расстояние  ;
; ,
,
 , (Н·м),
, (Н·м), ,
,