|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
С ИНТЕГРАЛЬНЫМИ РЕГУЛЯТОРАМИ ПРЯМОГО ДЕЙСТВИЯ
Рассмотрим работу и свойства АСР с регулятором давления воздуха прямого действия. Объектом регулирования является баллон 7 (рис. 35, а), нагрузка которого определяется расходом W 2 воздуха через клапан 6. Пополняется баллон через клапан 1, степень открытия которого определяет количество подвода W 1 воздуха. Заданное давление р0 в баллоне поддерживается регулятором прямого действия с мембранным датчиком 5 давления. С одной стороны на мембрану действует сила Fm от груза, подвешенного к ее жесткому центру, а с другой — давление воздуха. Жесткий центр мембраны рычажной передачей связан с регулирующим клапаном 1.
На установившемся режиме при одинаковых расходах воздуха (W 01 = W 02)через клапаны 1 и 6 давление р0 в баллоне не меняется. Силы, действующие на мембрану от давления воздуха и массы груза, уравновешены, а ее жесткий центр неподвижен. Если пренебречь трением в звеньях регулятора, то это условие определяется соотношением : p 0 fa = Fm ; где fa — активная площадь мембраны датчика. Отсюда р0= Fm / fa . Так как соотношение величин Fm и fa остается неизменным, то на установившихся режимах при любых нагрузках ОР регулятор поддерживает давление р0 постоянным, т.е. с нулевой статической ошибкой. Поэтому регулятор является астатическим и обеспечивает работу АСР с нулевой неравномерностью (рис. 35, б). Для настройки регулятора на более высокое давление p 0 ' следует увеличить силу Fm , а на более низкое давление р0´´ — уменьшить. При этом статическая характеристика АСР смещается параллельно самой себе. Статическое равновесие может нарушиться, например, при изменении нагрузки W 2. В случае прикрытия клапана 6 давление в баллоне возрастает, что нарушает установившееся равновесие сил, действующих на мембрану, вызвав ее движение вверх, а клапана 1 — в сторону уменьшения подвода W 1 воздуха до полного его закрытия. После снижения давления в баллоне ниже заданного р0 начинается движение мембраны и клапана в обратном направлении. Такой регулятор в динамике будет работать позиционно по принципу открыто-закрыто и для АСР будет характерен незатухающий переходный процесс I (рис. 35, в). Амплитуда колебаний давления Δр будет тем выше, чем больше инерционность датчика и меньше инерционность ОР. Увеличить устойчивость АСР можно установкой дросселя перед датчиком либо присоединением к регулятору катаракта, т.е. введением демпфирующего звена. Катаракт состоит из неподвижного цилиндра 2. Поршень 3 (см. рис. 35, а) разделяет его на две полости, заполненные маслом и соединенные между собой дроссельным клапаном 4. Поршень связан штоком с выходным звеном регулятора. На установившемся режиме поршень неподвижен, поэтому давление масла в полостях цилиндра одинаково и действие катаракта равно нулю. В динамике при перемещении поршня создается гидравлическое сопротивление вследствие перетекания масла из одной полости в другую через дроссельный клапан. Сила F К, для перемещения поршня, пропорциональна скорости его движения Δ yk /Δ t относительно цилиндра,
где Кк—коэффициент гидравлического сопротивления катаракта; fK — площадь поршня катаракта. Коэффициент КК характеризуется силой, приходящейся на единицу объемного расхода масла через дроссельный клапан, и зависит от вязкости масла и проходного сечения клапана. Если пренебречь силами инерции подвижных деталей регулятора и сухого трения в его звеньях (регулятор идеальный), то в динамике моменты сил действия датчика и катаракта уравновешиваются:
Регулятор в свою очередь через кинематическую связь с передаточным коэффициентом аСВ перемещает РО на расстояние Δm = -асв Δyр . Этот путь можно получить из уравнения (12), если перейти к бесконечно малым приращениям и проинтегрировать обе его части:
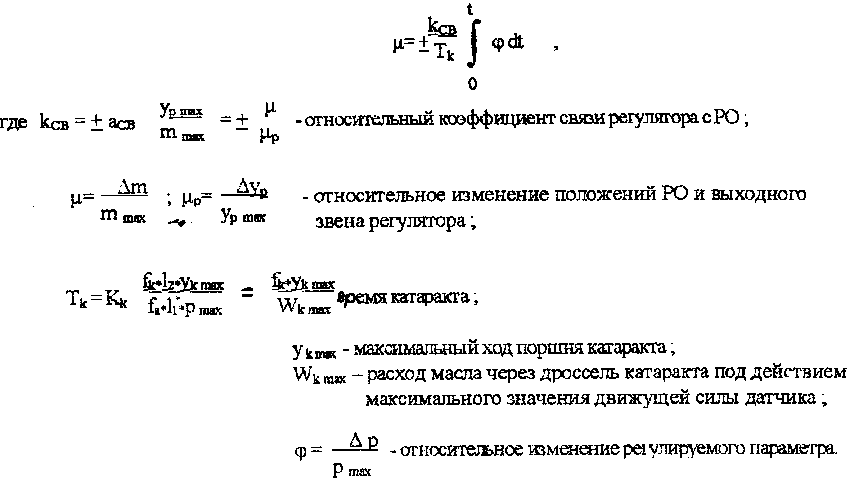
 В рассмотренной системе Δур=- Δm, поэтому асв = -1. Знак «минус» показывает на уменьшение открытия клапана при росте регулируемого параметра, что соответствует работе системы с установкой РО на стороне подвода ОР. При установке РО на стороне отвода в соотношении ставится знак «плюс». Из уравнения (13) следует, что регулятор воздействует на РО пропорционально интегралу (сумме) отклонений регулируемого параметра во времени до тех пор, пока наблюдается это отклонение. Такой регулятор, обеспечивающий интегральный закон регулирования, называется интегральным (И-регулятором). Член уравнения в правой части перед интегралом характеризует быстродействие регулятора. Уравнение динамики (13), выраженное в приращениях, можно привести к общему виду, выразив параметры в относительных единицах:
Время катаракта Тk характеризует его гидравлическое сопротивление — это время перемещения поршня катаракта из одного крайнего положения в другое под действием максимальной движущей силы датчика При постоянных конструктивных соотношениях звеньев регулятора время ТК зависит от открытия дроссельного клапана и вязкости масла в катаракте. На качество переходного процесса АСР в значительной степени влияет передаточное отношение от регулятора к РО, определяемое коэффициентом ксв , значение которого при правильном включении регулятора должно быть равно единице. Передаточное отношение должно быть таким, чтобы максимальный ход выходного звена регулятора соответствовал воздействию на РО, обеспечивая расход среды через него от нуля до максимума. Аналитически динамическую устойчивость линейной АСР можно оценить по корням характеристического уравнения, для получения которого нужно из уравнений (10) и (14) составить однородное линейное дифференциальное уравнение свободного движения системы, приняв λ=0 и исключив переменную μ. Если все вещественные корни и вещественные части комплексных корней характеристического уравнения системы отрицательны, то процесс регулирования будет затухающим, т.е. АСР устойчива. Рассмотренный И-регулятор может обеспечить устойчивость АСР, если ОР обладает положительным саморегулированием. При этом единственным параметром динамической настройки регулятора при наличии катаракта является время катаракта. По мере прикрытия дроссельного клапана время катаракта увеличивается и устойчивость АСР возрастает (график II на рис. 35, в). Чрезмерное прикрытие клапана может привести к росту динамического заброса и увеличению времени переходного процесса из-за уменьшения быстродействия регулятора. Устойчивость реальной АСР с И-регулятором прямого действия в значительной степени зависит от инерционности регулятора. Чем больше масса подвижных деталей регулятора, тем больше становятся силы инерции от внешних вынужденных механических колебаний, вызывая раскачивание системы. Вынужденные колебания груза измерителя рассмотренного регулятора могут возникнуть в судовых условиях под действием качки и привести к неустойчивости АСР, поэтому АСР с И-регутяторами прямого действия на судах распространения не получили. |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 232; Нарушение авторского права страницы
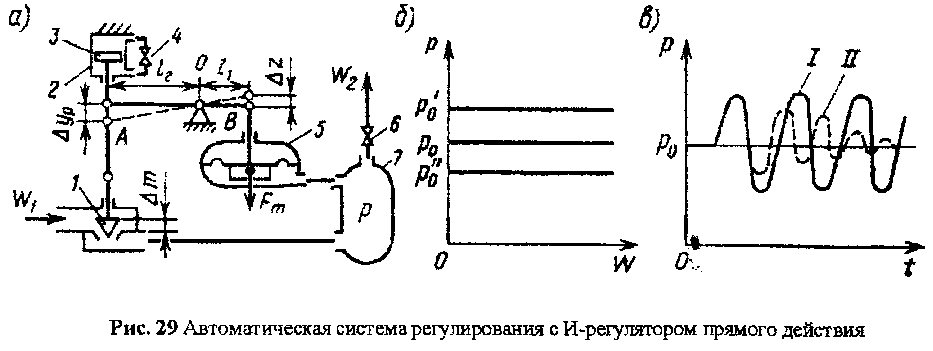 Рис. 35. Автоматическая система регулирования с И-регулятором прямого действия
Рис. 35. Автоматическая система регулирования с И-регулятором прямого действия