|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
КЛАССИФИКАЦИЯ ТЕХНИЧЕСКИХ СРЕДСТВ АВТОМАТИКИ.
Общие сведения. Объектами и их комплексами можно управлять вручную либо с помощью средств автоматики, обеспечивающих контроль, защиту технических средств судна и управление ими. Контроль. Работа технических средств судна может быть проконтролирована дистанционно или централизованно автоматически. Дистанционный контроль осуществляется средствами сбора, преобразования, передачи и отображения на пультах информации о состоянии и параметрах ОУ и о положении РО. Такой контроль характеризуется раздельными (автономными) каналами получения информации от датчиков и ее выдачи на показывающие приборы и световые табло исполнительной сигнализации. Информация о значении параметров может поступать непрерывно либо по вызову оператора. Централизованный автоматический контроль позволяет освободить оператора от непрерывного наблюдения за параметрами и состоянием ОУ. Функции автоматического контроля возлагаются на машины или системы централизованного контроля, различающиеся методами сбора и обработки первичной информации. В случае отклонения (выбега) контролируемых параметров за допускаемые пределы МЦК (СЦК.) обеспечивают срабатывание звуковой и световой АПС или регистрацию параметров, факта их выбега. Для лучшей ориентации обслуживающего персонала средствами сигнализации особо выделяют группу критических параметров, выбег которых может привести к аварии ОУ (группы ОУ) или нарушению ходового режима судна. Защита. Автоматическая защита обеспечивает предотвращение или локализацию аварийной ситуации при управлении объектом путем автоматического выключения, остановки, прекращения функционирования или переключения режимов работы при выходе параметров за установленные пределы или ошибочных действиях обслуживающего персонала. Срабатывание защиты сопровождается АПС, а для введения ОУ в работу требуется обычно ручное вмешательство. Местное управление. Оператор воздействует на элементы, не входящие в конструкцию РО и соединенные с ним электрическими, гидравлическими или пневматическими связями. В этом случае каждый РО имеет свою цепь управления от отдельного органа управления. Дистанционное управление. Оператор воздействует на органы управления (кнопки, переключатели, выключатели, рукоятки, педали), размещаемые, как правило, на пультах управления ЦПУ или ходового мостика судна. Автоматическое управление. Автоматизированная система управляет объектом (группой объектов) без непосредственного участия оператора. Задачей оператора является включение, выключение АСУ, переключение программ управления, контроль за функционированием системы и введение команд. Автоматизированные системы управления выполняют различные функции: — стабилизирующая — поддерживает предписанное значение управляемой величины на заданном уровне; — следящая — изменяет управляемую величину по сигналу от произвольного изменения переменной величины на входе АСУ (изменения задания); — программная — изменяет управляемую величину по заранее заданной программе, т.е. по программе изменяется вначале задание, а затем управляемая величина. Все судовые системы управления делят на локальные, групповые и комплексные. Локальная система. Система осуществляет управление одним объектом управления технических средств судна. Одним из видов локальной стабилизирующей АСУ является автоматическая система регулирования, поддерживающая с определенной точностью заданное значение регулируемого параметра воздействием на один РО. Автоматические системы регулирования классифицируют по общим признакам, обычно отражаемым в названии систем. В названии АСР, определяемом названием регулятора, указывают его назначение и совокупность основных свойств. По виду основного регулируемого параметра регулятора различают АСР давления, температуры, частоты вращения, вязкости и т.д. По источнику энергии, движущей выходное звено регулятора, а, следовательно, и регулирующий орган, могут быть АСР прямого и непрямого действия. В системе прямого действия воздействие на РО производится за счет энергии, развиваемой датчиком регулятора (рис. 26).
Рис. 26. Схемы автоматического регулирования уровня.
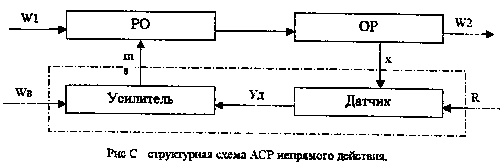
В системе непрямого действия выходное звено регулятора воздействует на РО за счет вспомогательной энергии, преобразованной в усилителе. В такой АСР (рис. 27) воздействие на ОР производится через РО регулятором непрямого действия, состоящем из датчика и усилителя.
Рис. 27. Структурная схема АСР непрямого действия.
По характеру воздействия на регулирующий орган АСР могут быть непрерывного (аналогового) и позиционного (дискретного) действия. Системы позиционного действия обычно работают по принципу включено-выключено, производя двухпозиционное воздействие на РО. Однако существуют системы и многопозиционного действия. По значению статической неравномерности могут быть АСР статические, неравномерность которых отличается от нуля, и астатические — с нулевым значением неравномерности. По закону регулирования, определяемому характером изменения во времени выходной величины регулятора от входной, АСР делят на релейные позиционные (Рп-регуляторы), интегральные (И-регуляторы), пропорциональные (П-регуляторы), пропорционально-интегральные (ПИ-регуляторы), пропорциональные пропорционально-интегральные (ППИ-регуляторы), пропорционально-дифференциальные (ПД-регуляторы), пропорционально-интегрально-дифференциальные (ПИД-регуляторы). По числу параметров, на которые реагирует регулятор, АСР делят на одно- и многоимпульсные (двух- и трехимпульсные). Для получения определенных статических и динамических свойств АСР применяют многоимпульсные регуляторы, которые могут реагировать на изменение не только значения регулируемого параметра, скорости его изменения, но также нагрузки ОР. В этом случае регулятор называется двухимпульсным. Если регулятор реагирует на все три величины, он называется трехимпульсным. Групповая система. В этом случае осуществляется управление группой управляемых объектов технических средств судна, в том числе объектов, имеющих свои локальные системы управления. Групповыми являются системы управления ГЭУ, вспомогательными механизмами, электростанциями, общесудовыми системами и т.д. Комплексная система. Система осуществляет управление всеми техническими средствами судна, объединяя несколько групповых систем. Комплексная автоматизация позволяет изменить организацию вахтенной службы экипажа и существенно сократить штат обслуживающего персонала, что значительно повышает экономическую эффективность эксплуатации судов. Полная автоматизация является дальнейшим развитием комплексной и выполняется в объеме, обеспечивающем передачу всех функций управления и контроля средствам автоматики. |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 213; Нарушение авторского права страницы