
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Критерии для оценки качества процессов регулирования.
Показатели качества процессов регулирования бывают прямыми, косвенными и интегральными. Прямые показатели качества удобно использовать в тех случаях, когда имеется график переходного процесса y(t), который может быть получен экспериментально в реальной системе регулирования или путем моделирования на ЭВМ. Если же такой возможности нет, то пользуются косвенными показателями качества, которые вычисляются без построения графика переходного процесса по коэффициентам уравнений или по частотным характеристикам. Наиболее распространенными прямыми показателями или критериями качества, применяемыми в системах управления, являются:
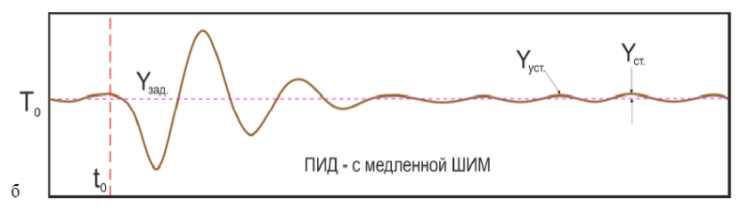
На рисунке б представлена Yст. - статическая ошибка пропорционально-интегрально-дифференциального цифрового микропроцессорного регулятора с ШИМ модуляцией, установленного на нагревательной лабораторной печи СНОЛ. T0 – заданная температура в печи, которая установилась в печи после ее включения в течение, например 5 минут. Поскольку напряжение на нагреватели поступает импульсами малой частоты, то в установившемся состоянии температура колеблется около заданной 200°С с амплитудой в 1°С. В момент времени t0 потребитель приоткрыл дверь печи, что привело к теплопотерям и понижению температуры. Регулятор зафиксировал понижение температуры и включением нагревателей скомпенсировал эту теплопотерю, вернув температуру на прежний уровень, но с сохранением ошибки (199°С – 200°С –201°С). 2. Динамическая ошибка регулирования Yдин., определяемая как наибольшее отклонение в переходном процессе регулируемой переменной от ее установившегося значения. Обычно наибольшее отклонение бывает при первом колебании вследствие инерционности системы.
4. Время разгона (tр.) – это время, в течение которого регулируемая величина с момента включения системы достигает заданного значения. 5. Перерегулирование σ, измеряемое в % и равное отношению первого максимального отклонения регулируемой переменной от ее установившегося значения к этому установившемуся значению:
Качество регулирования считается удовлетворительным, если перерегулирование не превышает 30– 40 %.
Интенсивность затухания колебаний в системе считается удовлетворительной, если степень затухания составляет 75 % и выше, в некоторых случаях допускается порядка 60 %. Для того, чтобы система автоматического регулирования удовлетворяла требуемому качеству необходимо, чтобы прямые показатели качества регулирования этой системы были меньше или равны заданным.
1. Линейный интегральный критерий Чем меньше значение линейного интегрального критерия, тем лучше качество процесса регулирования. Однако использование данного критерия для знакопеременных переходных процессов не дает объективной картины, так, например, для незатухающей синусоиды 2. Модульный интегральный критерий 3. |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 1115; Нарушение авторского права страницы
 1. Статическая ошибка регулирования Yст. или
1. Статическая ошибка регулирования Yст. или  , определяемая как разность между установившимся значением регулируемой переменной по окончании переходного процесса и ее заданным значением, т.е.
, определяемая как разность между установившимся значением регулируемой переменной по окончании переходного процесса и ее заданным значением, т.е.  .
. На рисунке а представлена Yст. – статическая ошибка пропорционального механического поплавкового регулятора уровня воды. H0 – заданный уровень воды в резервуаре (входной и выходной вентили полностью перекрыты). В момент времени t0 потребитель резко открыл расходный вентиль и оставил его в таком состоянии, что привело к уменьшению уровня воды. Вслед за уменьшением уровня пропорционально ему опустился и поплавок, открывая входной вентиль. Это привело к выравниванию расхода и прихода воды в емкость, но за счет статической ошибки – уровень воды понизился.
На рисунке а представлена Yст. – статическая ошибка пропорционального механического поплавкового регулятора уровня воды. H0 – заданный уровень воды в резервуаре (входной и выходной вентили полностью перекрыты). В момент времени t0 потребитель резко открыл расходный вентиль и оставил его в таком состоянии, что привело к уменьшению уровня воды. Вслед за уменьшением уровня пропорционально ему опустился и поплавок, открывая входной вентиль. Это привело к выравниванию расхода и прихода воды в емкость, но за счет статической ошибки – уровень воды понизился. 3. Время регулирования (время переходного процесса) Трег. – время, за которое разность между текущим значением регулируемой переменной и ее заданным значением становится меньше допустимого значения ошибки (практическое затухание колебаний с отклонением
3. Время регулирования (время переходного процесса) Трег. – время, за которое разность между текущим значением регулируемой переменной и ее заданным значением становится меньше допустимого значения ошибки (практическое затухание колебаний с отклонением  .
.

 6. Степень затухания ψ, измеряемая в %, служит количественной оценкой интенсивности затухания колебательных процессов и определяется как отношение разности первой и третьей амплитуд к первой амплитуде:
6. Степень затухания ψ, измеряемая в %, служит количественной оценкой интенсивности затухания колебательных процессов и определяется как отношение разности первой и третьей амплитуд к первой амплитуде: 
 Интегральные критерии качества представляют собой определенные интегралы по времени в пределах от 0 до ∞ от некоторой функции переходного процесса
Интегральные критерии качества представляют собой определенные интегралы по времени в пределах от 0 до ∞ от некоторой функции переходного процесса  или ошибки
или ошибки  и вычисляются, либо по переходным функциям системы, или по коэффициентам передаточной функции системы. Целью использования этих критериев является получение общей оценки быстродействия и отклонения регулируемой величины от установившегося значения.
и вычисляются, либо по переходным функциям системы, или по коэффициентам передаточной функции системы. Целью использования этих критериев является получение общей оценки быстродействия и отклонения регулируемой величины от установившегося значения. служит для оценки качества не колебательных процессов. Геометрически этот критерий характеризует площадь, заключенную между кривой переходного процесса и осью абсцисс, он учитывает как время регулирования, так и величину динамических отклонений.
служит для оценки качества не колебательных процессов. Геометрически этот критерий характеризует площадь, заключенную между кривой переходного процесса и осью абсцисс, он учитывает как время регулирования, так и величину динамических отклонений. . Поэтому для оценки качества регулирования таких процессов используют интегральные оценки, знакопеременность подынтегральной функции которых устранена каким-либо способом.
. Поэтому для оценки качества регулирования таких процессов используют интегральные оценки, знакопеременность подынтегральной функции которых устранена каким-либо способом. применяется для оценки качества колебательных процессов, а для не колебательных процессов он совпадает с линейным интегральным критерием. Для его вычисления требуется знание переходного процесса. На практике этот критерий используется при численном исследовании систем на моделях с применением вычислительной техники, т.е. там, где операция взятия модуля не представляет трудности. Геометрически критерий равен площади, заключенной между кривой и осью абсцисс.
применяется для оценки качества колебательных процессов, а для не колебательных процессов он совпадает с линейным интегральным критерием. Для его вычисления требуется знание переходного процесса. На практике этот критерий используется при численном исследовании систем на моделях с применением вычислительной техники, т.е. там, где операция взятия модуля не представляет трудности. Геометрически критерий равен площади, заключенной между кривой и осью абсцисс. Интегральный квадратичный критерий
Интегральный квадратичный критерий  является наиболее распространенным критерием качества и представляет собой площадь под кривой y2(t). Как видно из рисунка, разные по величине ординаты переходного процесса входят в критерий с разным весом, что приводит к тому, что начальный участок переходного процесса приобретает наибольшее значение, чем его "хвост", который практически не влияет на квадратичный критерий. Стремясь минимизировать интегральный квадратичный критерий, фактически минимизируют наибольшие отклонения регулируемой величины, поэтому минимальные значения критерия всегда соответствуют колебательным процессам с малым затуханием. Квадратичный критерий, как и линейный, можно вычислить без построения переходного процесса по частотной характеристике замкнутой системы и преобразованию по Фурье от входного сигнала.
является наиболее распространенным критерием качества и представляет собой площадь под кривой y2(t). Как видно из рисунка, разные по величине ординаты переходного процесса входят в критерий с разным весом, что приводит к тому, что начальный участок переходного процесса приобретает наибольшее значение, чем его "хвост", который практически не влияет на квадратичный критерий. Стремясь минимизировать интегральный квадратичный критерий, фактически минимизируют наибольшие отклонения регулируемой величины, поэтому минимальные значения критерия всегда соответствуют колебательным процессам с малым затуханием. Квадратичный критерий, как и линейный, можно вычислить без построения переходного процесса по частотной характеристике замкнутой системы и преобразованию по Фурье от входного сигнала.