
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение свойств объекта регулирования по кривым разгона.
Каждая из таких кривых является графиком изменения во времени выхода объекта – Y в ответ на ступенчатое изменение входа в начальный момент времени t на величину UX.
Эти кривые могут быть сняты экспериментально – хронометрированием процесса изменения выхода отдельно взятого (без регулятора) объекта после приложения входного воздействия – включения подачи топлива в печь или замыкания рубильника в цепи электропитания при электрическом нагреве. Такой подход широко распространен при работе с металлургическими объектами, характерными свой сложностью и далеко не всегда определимыми как причинно-следственными связями между составляющими их элементами, так и выделением отдельных звеньев из состава объекта. Если в простых случаях удается построить математическую модель металлургического объекта аналитически, то кривая разгона представляет собой график общего решения дифференциального уравнения при принятых начальных условиях :
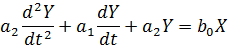
Вообще же металлургические объекты могут описываться линейными дифференциальными уравнениями и значительно более высокого порядка а) статические объекты (обладают самовыравниванием):
Данное уравнение описывает поведение объекта, который имеет статическую линейную характеристику б) астатические объекты (не обладают самовыравниванием) не имеют в правой части уравнения слагаемого
1. Кривая разгона статического объекта с самовыравниванием первого порядка. Дифференциальное уравнение объекта – После выхода на расчетный режим первая производная превратится в ноль и тогда горизонтальный участок на рисунке для кривой 1 будет равен 2. Кривая разгона статического объекта с самовыравниванием второго порядка (S – образная кривая). Дифференциальное уравнение объекта - 3. Кривая разгона статического объекта с самовыравниванием второго порядка (S – образная кривая) с чистым запаздыванием to. 4. Кривая разгона астатического объекта без самовыравнивания первого порядка. Дифференциальное уравнение объекта – Алгебраическая формула после решения уравнения 5. Кривая разгона астатического объекта без самовыравнивания второго порядка. 6. Кривая разгона астатического объекта без самовыравнивания второго порядка с чистым запаздыванием to. Основным математическим аппаратом при изучении и исследовании систем управления является аппарат дифференциальных уравнений. При этом различают стационарные объекты, коэффициенты дифференциальных уравнений которых не изменяются во времени, и нестационарные объекты, у которых коэффициенты изменяются с течением времени, например, изменение теплопроводности, старение катализатора и др.
9.Динамическое звено: определение и назначение, понятие переходного процесса, статической, динамической характеристики, единичного ступенчатого воздействия, типового звена.
Смысл этого уравнения заключается в том, что имеется возможность после его решения получить зависимость изменения выходного параметра с течением времени в зависимости от изменения входного параметра со временем. Таким образом, поведение отдельных физических компонентов систем управления и регулирования, и систем в целом в переходном режиме (переходе из одного установившегося состояния в другое) описываются дифференциальными уравнениями (уравнения динамики). Решение уравнений динамики позволяет еще на этапе проектирования САР прогнозировать ее поведение при переходе из одного состояния в другое (оценить инерционность системы, величину перерегулирования и т.д.). Переходный режим элемента или системы характеризуется динамической или переходной характеристикой, которая показывает зависимость изменения во времени выходной величины от изменения входной и строится в координатах время – выходная величина. Таким образом, любую САР можно представить в виде набора взаимосвязанных физических конструкционных элементов, которые называются звеньями, а для исследования динамических свойств системы составляют структурные схемы, которые отражают взаимодействие составных частей (звеньев) системы в момент переходного процесса, в отличие от блочных и функциональных схем (рассмотрены выше при описании САР и САУ), которые отражают состояние системы в статике. При анализе динамических свойств САР нас интересует именно математическая модель процесса регулирования. Вместе с тем, САР могут находиться и в установившемся состоянии (положение равновесия или покоя), когда входные и выходные величины не меняются. В этом положении (в статике) входные и выходные величины от времени не зависят и соотношение между ними описывается алгебраическими уравнениями Y= f(X), которые называются уравнениями статики. Графическое изображение этой зависимости называют статической характеристикой и для линейных элементов и систем она представляет прямую линию
САР регулирования температуры в печи, которая в идеале имеет практически линейную взаимосвязь между температурой в печи (входная величина) и величиной термо-ЭДС на выходе (выходная величина). Статическую характеристику можно получить экспериментально, помещая спай в термостат с известной температурой и замеряя цифровым вольтметром напряжение термопары при различных температурах. По полученным экспериментальным данным легко получить уравнение прямой и использовать его как математическую модель при создании систем управления. Примеры линейных статических характеристик приведены на рисунках, а уравнение прямой имеет вид – Теперь рассмотрим динамическую характеристику термопары. Для этого поместим две исследуемые термопары в печь без системы регулирования. Одна из термопар имеет защитный колпачок из керамики, вторая не имеет колпачка. Динамические характеристики термопар в каталогах обозначают как показатель тепловой инерции (секунды, миллисекунды). Этот показатель определяется погружением в предварительно нагретую до заданной температуры печь холодного термоэлектрического датчика с фиксацией времени стабилизации показаний. Фактически мы экспериментально снимаем кривую разгона с определением времени разгона (для домашнего ртутного градусника время разгона, т.е. время измерения температуры – 10 минут). Таким образом, красная кривая – почти истинная температура в печи, которую выдает термопара без колпачка с показателем тепловой инерции 10 миллисекунд, а синяя кривая – температура, которую отдает термопара с показателем тепловой инерции 40 сек. Понятно, что если температура в каком-либо объекте изменяется скачкообразно, то высокая инерционность термопары будет отрицательно сказываться на системе регулирования в целом. Для упрощения операций по получению динамических характеристик сложных систем используют передаточную функцию, которая так же, как и дифференциальное уравнение, полностью характеризует динамику системы или элемента САР, но не содержит производных и является алгебраическим выражением. При разработке САР удобно представлять их состоящими из простых элементов, называемыми типовыми динамическими звеньями. Их называют типовыми, так как независимо от физической природы, назначения и устройства конкретных элементов систем и самих систем число таких звеньев с динамической точки зрения ограничено, и они подразделяются только по своим динамическим свойствам (виду дифференциального уравнения). Эти характерные уравнения могут быть одинаковыми при различной физической сущности в звене, т.е. одним и тем же типом динамического звена охватываются элементы, в которых протекают разные физические процессы (электрические, гидравлические, тепловые).
Типовое звено не обязательно представляет собой отдельный конструкционный элемент системы, а может быть частью элемента. Элемент системы (объект регулирования, регулятор, чувствительный элемент и т.д.) будет представляться определенным соединением типовых звеньев, классификация которых будет рассмотрена ниже. При сравнении динамических свойств элемента удобно рассматривать их реакции на стандартное типовое воздействие. Таким воздействием может быть единичная ступенчатая функция. Такая функция значительно упрощает решение приведенного выше дифференциального уравнения, описывающего поведение выходной величины с течением времени в зависимости от изменения входной опять таки с течением времени, а также позволяет сравнивать, легче воспринимать и анализировать различные уравнения. Таким образом, мы ставим граничные условия, согласно которых значение входной величины X до определенного момента времени равно нулю, а в момент времени t=0 скачкообразно изменяется на единицу и остается в дальнейшем постоянным. Переходный процесс после поступления такого входного воздействия называется переходной функцией (переходной функцией называется аналитическое выражение для решения линейного дифференциального уравнения при входном сигнале x(t) = 1(t) и нулевых начальных условиях). Такого рода воздействию соответствует, например, сброс или включение нагрузки в системах регулирования (отказ мотора в системе регулирования). Переходные функции типовых динамических звеньев будут рассмотрены ниже. 10.Типовые звенья: классификация и понятие переходной функции; пропорциональное и апериодическое звенья – определения, практические примеры. Статические звенья, у которых статическая характеристика отлична от нуля, имеют однозначную связь между входной и выходной переменными в статическом режиме. К ним относят усилительное, апериодическое, колебательное звенья (статические звенья характеризуются тем, что имеют линейную статическую характеристику и способны переходить от одного устойчивого состояния к другому). Пропорциональным (усилительным) называют звено, у которого выходная величина в каждый момент времени пропорциональна входной величине. Звено описывается алгебраическим уравнением График переходной функции пропорционального звена с коэффициентом усиления 2
Примерами усилительного звена могут служить: зубчатая передача, если входная величина – угол поворота малой шестерни, выходная – угол поворота большой шестерни; потенциометрический датчик измерительного прибора, если входная величина – перемещение движка переменного резистора, а выходная – снимаемое напряжение. Многие датчики сигналов относятся к пропорциональному звену, если переходные процессы в них малы и ими можно пренебречь. Такие датчики также называются безынерционными и обеспечивают мгновенное преобразование измеряемой величины.
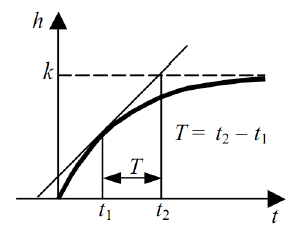
Статические (а и б) и динамические (в) характеристики редуктора Апериодическим (инерционным) называется звено, в котором при подаче на его вход скачкообразного сигнала в виде единичной функции выходная величина изменится по экспоненциальному закону (апериодически), стремясь к новому установившемуся значению. Это звено также относится к статическим звеньям и описывается дифференциальным уравнением а переходная функция имеет вид
Постоянная времени характеризует инерционность звена и зависит от величин массы или сопротивления и емкости – чем больше масса, сопротивление и емкость, тем больше инерционность звена и больше Т. Постоянная времени – это время, за которое выходная величина достигла бы своего установившегося значения, если бы изменялась с постоянной начальной скоростью. Чем больше T, тем переходный процесс более длительный, и если величина T мала, то звено становится безынерционным. Апериодическое звено, как и усилительное, является статическим. Примерами апериодических звеньев могут служить: 1. Двигатель постоянного тока и построенный на его базе электропривод, если входная величина – подводимое напряжение к обмоткам двигателя, а выходная величина – скорость вращения вала (число оборотов в минуту). Двигатель постоянного тока характеризуется плавным пуском, особенно под нагрузкой, когда после его подключения к питающей сети номинального напряжения скорость вращения ротора плавно увеличивается до номинального значения. По сравнению с таким двигателем, асинхронный двигатель переменного тока с очень жесткой пусковой характеристикой можно считать усилительным звеном – у него очень жесткая пусковая характеристика. 2. Процесс нагревания тела (например, термопары с защитным колпачком), помещенного в предварительно разогретую до температуры t печь, если температура в печи t – входная величина, а средняя температура тела – выходная величина.
11. Типовые звенья: классификация и понятие переходной функции; колебательное и интегрирующие звенья – определения, практические примеры. Колебательным называется такое звено, в котором выходная величина при скачкообразном входном воздействии стремится к новому установившемуся значению, совершая относительно него колебания, амплитуда которых затухает по закону экспоненты. Физически колебательное звено можно представить как соединение двух физических элементов, обладающих емкостью для какого-либо вещества (или энергии) и способных взаимно обмениваться этими запасами через сопротивление. В процессе такого взаимообмена при возмущениях, нарушающих равновесие звена, возникают колебания выходной величины. Если в результате колебаний запас энергии в звене уменьшается, то колебания затухают, а само звено называют устойчивым. Если запас энергии увеличивается, то колебания усиливаются, а само звено называется неустойчивым. Дифференциальное уравнение имеет вид: Примерами колебательных звеньев могут служить электрический колебательный контур, состоящий из сопротивления, индуктивности и емкости (если на вход подать путем включения рубильника напряжение в 100 В, то какое то время на выходе напряжение будет колебаться около значения 100 В за счет перераспределения различных видов энергии между емкостью и индуктивностью), упругие механические передачи, гироскопические элементы. Другой пример – упругая механическая передача, в которой входной и выходной вал соединяются через резиновую соединительную муфту, а на выходном вале закреплен маховик определенной массы. Статическая характеристика – прямая, связывающая входную величину – угол поворота входного вала с выходной величиной – углом поворота выходного вала. Если резко повернуть входной вал на 90 градусов, то выходной вал, к которому прикреплен маховик, не провернется мгновенно на тот же угол, а начнет медленно изменять свое положение, т.к. инерцию маховика мгновенно изменить нельзя. В тоже время скрученная резиновая муфта, запасшая энергию при мгновенном повороте входного вала, начинает постепенно выпрямляться и раскручивать массивный маховик, который, в конце концов, не может остановиться при положении выходного вала в 90 градусов, а продолжает проворачиваться за счет накопленной кинетической энергии, одновременно скручивая муфту в противоположном направлении. Процесс продолжается до тех пор, пока потери энергии на трение подшипников и разогрев резины при скручивании не приведут к остановке выходного вала в положении 90o (колебательный переходный процесс закончился). Третий пример – поплавковый ротамер. При наличии нестабильного скачкообразного расхода или недостаточного рабочего (входного) давления при измерении расхода газа, поплавок при перепадах расхода может получать значительное ускорение и совершать паразитные колебательные движения с убывающей амплитудой. В таком случае измерительная секция может быть оборудована системой демпфирования поплавка. Система гашения колебаний также используется и для стрелки прибора. Четыре бесконтактных магнитных демпфера гасят колебания флажка указателя, стабилизируя, таким образом, положение указателя без искажения измеренного значения . Колебательное звено является статическим так же, как усилительное и апериодическое звенья. Интегрирующим (астатическим) называют звено, у которого скорость изменения выходной величины пропорциональна входной величине, а сама выходная величина пропорциональна интегралу по времени от входной величины. У астатических звеньев после поступления на вход единичного воздействия выходная величина не приходит к установившемуся значению. Представляет собой дифференциальное уравнение вида Интегрирующее звено обладает астатизмом, поскольку в установившемся режиме работы здесь отсутствует однозначная зависимость между входными и выходными величинами – отсутствует статическая характеристика. Выходная величина может с течением времени неограниченно возрастать или убывать, не приходя к установившемуся значению. Если переходная функция идеального интегрирующего звена представляет собой линию, то переходная функция реального интегрирующего звена отличается тем, что в начальный момент времени она изменяется по экспоненте, а затем переходит в прямую линию. Входным параметром является производительность насосов, а выходным – уровень жидкости, который при любом малейшем изменении производительности одного из насосов (при этом нарушается баланс между притоком и расходом воды в баке) уменьшается или увеличивается непрерывно. Примером реального интегрирующего звена является электродвигатель, если в качестве выходной величины рассматривать не угловую скорость, а угол поворота выходного вала, который является интегралом от угловой скорости. Электродвигатель, который уже включен и его ротор вращается с постоянной скоростью –идеальное интегрирующее звено, но в момент пуска постоянная угловая скорость установится не сразу, а с некоторым замедлением, и электродвигатель следует рассматривать как реальное интегрирующее звено. При этом при включении (т.е. подаче единичной ступенчатой функции) угол поворота вала двигателя, являющимся выходной величиной, будет изменяться непрерывно от 0 градусов и до бесконечности (если двигатель не выключить). Примером интегрирующего звена являются счетчики, суммирующие расход вещества или энергии за определенный промежуток времени, уровень в емкости и т.п. 12.Типовые звенья: классификация и понятие переходной функции; дифференцирующее звено и звено чистого запаздывания – определения, практические примеры.
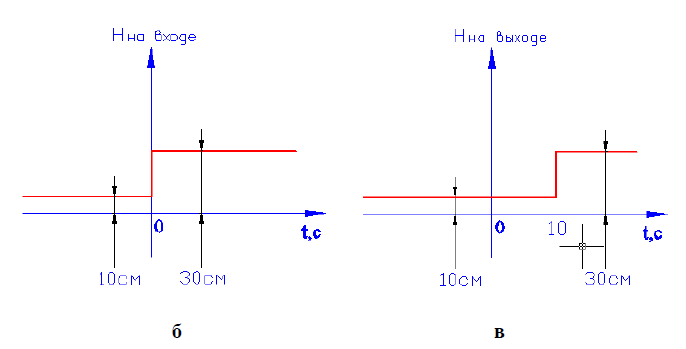
В природе идеально дифференцирующих звеньев не существует. Реальным дифференцирующим звеном является тахогенератор постоянного тока, у которого за входную величину принят угол поворота вала, а за выходную – Э.Д.С. якоря. Примерами реальных звеньев являются электрические контуры и дифференцирующие устройства (операционные усилители). Звеном чистого запаздывания называется звено, которое пропускает через себя входную функцию без искажения, но с задержкой на время t, называемого временем чистого запаздывания. Переходная функция представляет собой единичное ступенчатое изменение выходной величины с отставанием от такого же изменения входной величины. Характерным примером служит транспортер, на котором после изменения входной величины (толщины слоя сыпучего материала на входе транспортера) должно пройти время, после которого на ту же величину изменится выходная величина (толщина слоя на выходе транспортера зависит от его длины, скорости перемещения ленты и в нашем примере время чистого транспортного запаздывания – 10 с).
Ленточный транспортер (а), единичное ступенчатое воздействие (б) и переходная функция (в) 13.Переходные процессы в системах регулирования и их устойчивость. Одним из основных требований, предъявляемых к замкнутым системам автоматического регулирования, является обеспечение устойчивых условий работы. Устойчивость САР – свойство, при котором после нанесения возмущающего воздействия переходный процесс имеет конечную длительность, вслед за чем система переходит в установившееся состояние. В простейшем случае понятие устойчивости систем связано со способностью системы возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Если система неустойчива, то она не возвращается в исходное состояние. Таким образом, различают три типа систем: 1) Устойчивые − системы, которые после снятия возмущений возвращаются в исходное состояние равновесия;
3) Неустойчивые − системы, в которых не устанавливается равновесие после снятия возмущений. Положение равновесия шара характеризуется точкой A0. При отклонении в положение A1 в первом случае шар стремится к положению A0, во втором не стремится к этому положению, в третьем − состояние шара безразлично. Примером неустойчивой системы может служить объект, охваченный положительной обратной связью. Так, некоторые химические реакторы, в которых происходят экзотермические реакции, являются неустойчивыми объектами, так как при повышении температуры скорость химической реакции увеличивается, что в свою очередь приводит к увеличению выделения тепла реакции и повышению температуры. Устойчивостью называют способность системы последовательно уменьшать возникающие в ней отклонения выхода объекта от его заданного значения. Пример переходного процесса в устойчивой САР показан на рисунке а, а в неустойчивой – на рисунке б. Наиболее часто причиной потери устойчивости физически исправной САР является неправильная настройка регулятора. Известны следующие способы анализа систем на устойчивость: 1. Непосредственное решение уравнений динамики систем и построение графика переходного процесса. 2. Применение специальных критериев устойчивости, позволяющих обойти трудности математического характера. 3. Компьютерное моделирование переходных процессов при заданных значениях параметров объектов и регуляторов. Регулирование в замкнутых системах осуществляется по отклонению, т.е. система в своей работе использует текущую информацию о значениях регулируемой величины и с помощью регулятора, осуществляющего отрицательную обратную связь, принимают меры к устранению отклонения этой величины от заданного значения. Состояние САР, при котором возмущения отсутствуют и регулируемая величина равна заданному значению называют равновесным. В случае нарушения равновесного состояния под влиянием каких-либо возмущающих воздействий наступает неустановившийся режим, который сопровождается отклонением регулируемой величины и изменением регулирующего воздействия. Процесс перехода во времени от исходного равновесного состояния к новому, достигнутому в результате взаимодействия объекта регулирования и автоматического регулятора, называют переходным процессом и процессом регулирования. Представляют переходный процесс в виде графика, который называется кривой переходного процесса или кривой процесса регулирования и строится в координатах время – значение регулируемого параметра. Переходный процесс после однократного возмущения может проходить по-разному, но в общем случае в системах автоматического регулирования возникают колебательные переходные процессы. На практических занятиях мы строили кривую процесса регулирования для электрической печи сопротивления. При этом выходным параметром являлась температура в печи, которая пришла в состояние равновесия (в нашем случае – 200°С), совершив ряд колебаний в районе 200oС с уменьшающейся амплитудой отклонений, постепенно восстанавливая новое равновесное состояние. Переходные процессы, подобные рассмотренному, называют затухающими (сходящимися) колебательными процессами. Если переходный процесс совершается без многочисленных колебаний вокруг нового равновесного состояния, то такой процесс называется апериодически сходящимся. В этом случае отклонение величины в течение времени плавно, без колебаний уменьшается, т.е. система также восстанавливает равновесное состояние. Системы регулирования, у которых значение выходного параметра после окончания действия возмущения будет изменяться апериодически с затухающей амплитудой колебаний, являются устойчивыми, так как они в конце концов приходят в равновесное состояние. В неустойчивых системах колебательные и апериодические переходные процессы имеют расходящийся характер и такие АСР считают неустойчивыми и непригодными к эксплуатации. На рисунке представлен неустойчивый переходный процесс с расходящейся амплитудой колебаний. Устойчивость является необходимым, но недостаточным свойством системы автоматического регулирования, поскольку в устойчивых системах могут возникать очень медленно затухающие, длительные переходные процессы с большим числом колебаний и большой величиной перерегулирования. Поэтому возникает необходимость количественно оценивать качество переходного процесса в устойчивой системе регулирования. |
Последнее изменение этой страницы: 2019-03-31; Просмотров: 916; Нарушение авторского права страницы
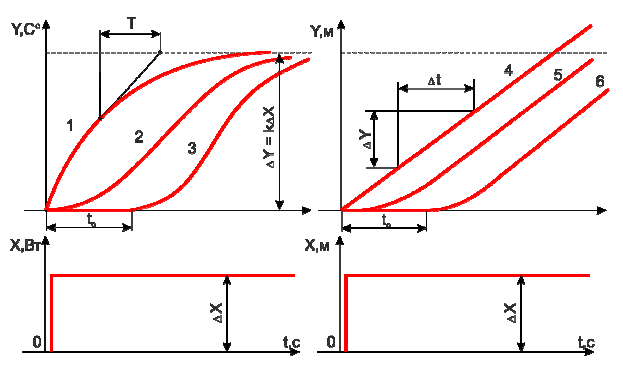 Кривые разгона для наиболее часто встречающихся металлургических объектов
Кривые разгона для наиболее часто встречающихся металлургических объектов

 , в неустановившемся (переходном) режиме при любой форме входного сигнала.
, в неустановившемся (переходном) режиме при любой форме входного сигнала. ,соответственно, у них отсутствует статическая характеристика:
,соответственно, у них отсутствует статическая характеристика:
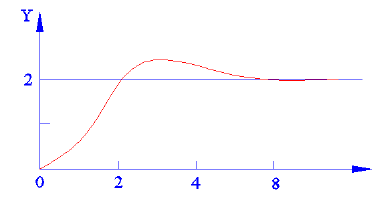 На рисунке показан график решения, показывающий, что в системе, описываемой исходным дифференциальным уравнением, после поступления входного воздействия возникает колебательный затухающий переходный процесс и система переходит из состояния равновесия при значении выходной величины 0 в новое состояние равновесия 2 примерно через восемь секунд. Уравнение статики в нашем примере легко получается из уравнения динамики, и оно имеет вид
На рисунке показан график решения, показывающий, что в системе, описываемой исходным дифференциальным уравнением, после поступления входного воздействия возникает колебательный затухающий переходный процесс и система переходит из состояния равновесия при значении выходной величины 0 в новое состояние равновесия 2 примерно через восемь секунд. Уравнение статики в нашем примере легко получается из уравнения динамики, и оно имеет вид  или
или  . Это прямая линия, которая проходит через начало координат.
. Это прямая линия, которая проходит через начало координат.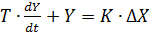
 . Алгебраическая формула после решения уравнения:
. Алгебраическая формула после решения уравнения:  .
.

 и представляет собой уравнение прямой.
и представляет собой уравнение прямой.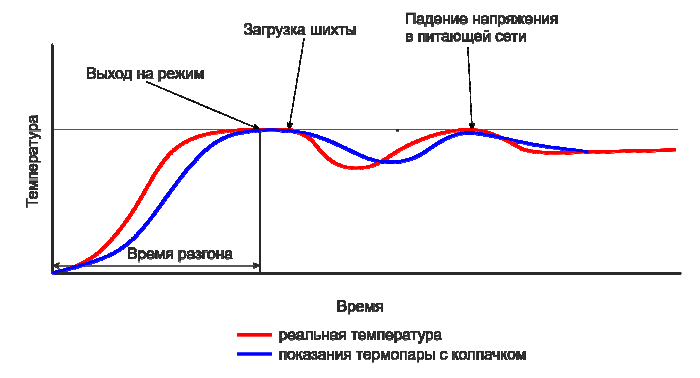 Не только объекты регулирования, рассмотренные выше, но и автоматические системы регулирования и элементы, из которых они состоят, являются динамическими системами и элементами, т.е. характеризуются протеканием процессов во времени. Все входные и выходные величины в них являются функциями времени: X= X(t), Y= Y(t). Изменение входных и выходных величин во времени описывается дифференциальными уравнениями. У линейных систем уравнения динамики – линейные дифференциальные уравнения, т.е. такие уравнения, в которых входная и выходная величины и их производные – в первой степени. Признаками нелинейности являются - произведение переменных или их производных, корень квадратный или более высокая степень переменной, любая другая нелинейная связь переменных и их производных. Для элемента (системы) с одной входной и одной выходной величинами линейное дифференциальное уравнение с постоянными коэффициентами имеет вид
Не только объекты регулирования, рассмотренные выше, но и автоматические системы регулирования и элементы, из которых они состоят, являются динамическими системами и элементами, т.е. характеризуются протеканием процессов во времени. Все входные и выходные величины в них являются функциями времени: X= X(t), Y= Y(t). Изменение входных и выходных величин во времени описывается дифференциальными уравнениями. У линейных систем уравнения динамики – линейные дифференциальные уравнения, т.е. такие уравнения, в которых входная и выходная величины и их производные – в первой степени. Признаками нелинейности являются - произведение переменных или их производных, корень квадратный или более высокая степень переменной, любая другая нелинейная связь переменных и их производных. Для элемента (системы) с одной входной и одной выходной величинами линейное дифференциальное уравнение с постоянными коэффициентами имеет вид . Уравнения статики легко могут быть получены из уравнений динамики, если принять все производные входной и выходной величины равными нулю (т.к. в положении равновесия они не меняются).
. Уравнения статики легко могут быть получены из уравнений динамики, если принять все производные входной и выходной величины равными нулю (т.к. в положении равновесия они не меняются).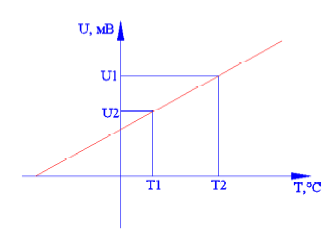 В качестве примера можно рассмотреть статическую характеристику хромель-алюмелевой термопары, как элемента
В качестве примера можно рассмотреть статическую характеристику хромель-алюмелевой термопары, как элемента , где коэффициент A определяет точку пересечения прямой с осью Y, а коэффициент B – угол наклона прямой относительно оси X. Прямая проходит через начало координат в том случае, когда А=0.
, где коэффициент A определяет точку пересечения прямой с осью Y, а коэффициент B – угол наклона прямой относительно оси X. Прямая проходит через начало координат в том случае, когда А=0.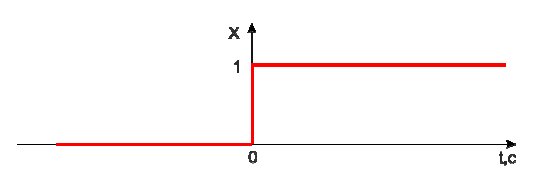 График единичной ступенчатой функции
График единичной ступенчатой функции
 , где k – коэффициент усиления.
, где k – коэффициент усиления.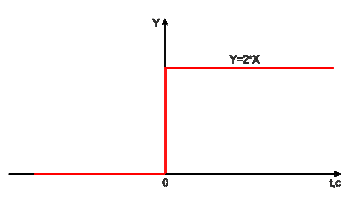 Значение коэффициента усиления определяет масштаб изменения выходного сигнала. Это звено мгновенно и без искажений воспроизводит входную величину на выходе. Следует отметить, что усилительное звено является некоторой идеализацией реальных звеньев, так как длительность переходного процесса в реальных звеньях отлична от нуля. Это звено относится к статическим звеньям, которые при ступенчатом входном воздействии переходят из начального положения равновесия в новое положение равновесия, т.е. в установившемся режиме работы звена существует однозначная зависимость между значениями выходной и входной величин.
Значение коэффициента усиления определяет масштаб изменения выходного сигнала. Это звено мгновенно и без искажений воспроизводит входную величину на выходе. Следует отметить, что усилительное звено является некоторой идеализацией реальных звеньев, так как длительность переходного процесса в реальных звеньях отлична от нуля. Это звено относится к статическим звеньям, которые при ступенчатом входном воздействии переходят из начального положения равновесия в новое положение равновесия, т.е. в установившемся режиме работы звена существует однозначная зависимость между значениями выходной и входной величин.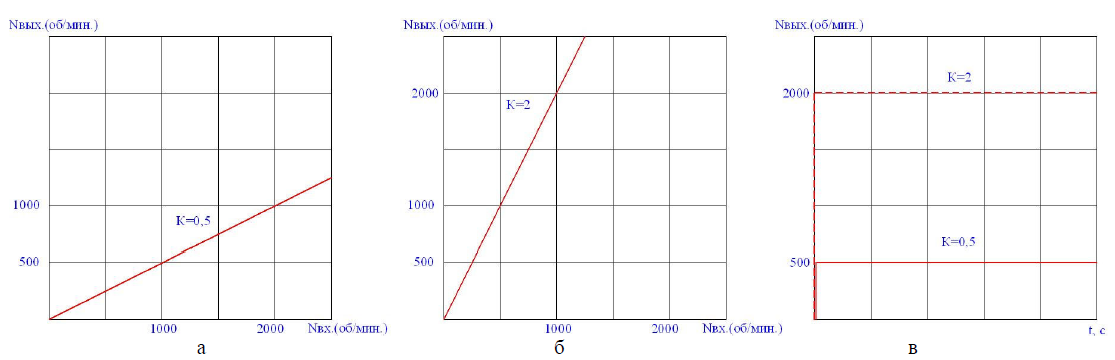 Рассмотрим пример с редуктором – коробкой передач. Статическая характеристика редуктора – линейная зависимость между частотой вращения входного вала (входная величина, которую обозначим как Nвх.) и частотой вращения выходного вала (выходная величина Nвых.). Если представить себе, что наш редуктор не сломается от мгновенного включения приводного двигателя с частотой вращения 1000 об/мин., то так же мгновенно выходной вал будет вращаться с частотой 500 об/мин. при коэффициенте усиления 0,5. Это понижающая передача. К = 2 – повышающая ≪пятая≫, К = 1 – ≪четвертая≫.
Рассмотрим пример с редуктором – коробкой передач. Статическая характеристика редуктора – линейная зависимость между частотой вращения входного вала (входная величина, которую обозначим как Nвх.) и частотой вращения выходного вала (выходная величина Nвых.). Если представить себе, что наш редуктор не сломается от мгновенного включения приводного двигателя с частотой вращения 1000 об/мин., то так же мгновенно выходной вал будет вращаться с частотой 500 об/мин. при коэффициенте усиления 0,5. Это понижающая передача. К = 2 – повышающая ≪пятая≫, К = 1 – ≪четвертая≫. ,
, .
. Инерционность апериодического звена связана с его свойством накапливать или рассеивать какой-либо вид энергии или материи, вследствие чего сигнал, поданный на вход такого звена, вызывает изменение выходной величины с некоторым замедлением. Выходное значение в апериодическом звене устанавливается только спустя некоторое время после подачи входного воздействия и поэтому апериодическое звено часто называют инерционным звеном первого порядка.
Инерционность апериодического звена связана с его свойством накапливать или рассеивать какой-либо вид энергии или материи, вследствие чего сигнал, поданный на вход такого звена, вызывает изменение выходной величины с некоторым замедлением. Выходное значение в апериодическом звене устанавливается только спустя некоторое время после подачи входного воздействия и поэтому апериодическое звено часто называют инерционным звеном первого порядка. , где ξ - коэффициент затухания, характеризующий степень колебательности переходного процесса:
, где ξ - коэффициент затухания, характеризующий степень колебательности переходного процесса:  .
.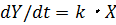 , а переходная функция имеет вид Y(t) = k・t и представляет собой прямую линию, где k –коэффициент передачи звена по скорости и численно равен скорости изменения выходной величины при единичном входном воздействии, и поэтому иногда его называют скоростью разгона.
, а переходная функция имеет вид Y(t) = k・t и представляет собой прямую линию, где k –коэффициент передачи звена по скорости и численно равен скорости изменения выходной величины при единичном входном воздействии, и поэтому иногда его называют скоростью разгона.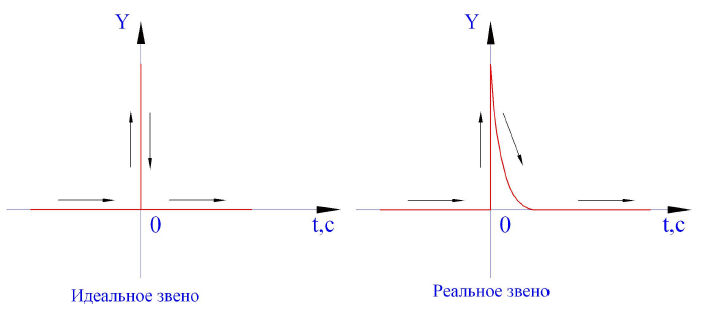 Дифференцирующим называют звено, в котором выходная величина пропорциональна производной по времени от входной величины. Различают идеальное и реальное дифференцирующие звенья. Идеальное звено описывается уравнением
Дифференцирующим называют звено, в котором выходная величина пропорциональна производной по времени от входной величины. Различают идеальное и реальное дифференцирующие звенья. Идеальное звено описывается уравнением 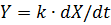 . Из приведенного уравнения следует, что выходная величина идеального дифференцирующего звена при скачкообразном входном воздействии изменяется с бесконечно большой скоростью, образуя мгновенный импульс бесконечно большой амплитуды с мгновенным возвращением к нулю. С точки зрения математики
. Из приведенного уравнения следует, что выходная величина идеального дифференцирующего звена при скачкообразном входном воздействии изменяется с бесконечно большой скоростью, образуя мгновенный импульс бесконечно большой амплитуды с мгновенным возвращением к нулю. С точки зрения математики  является скоростью изменения входного параметра и эта скорость равна 0 до и после того момента времени, когда входная величина скачкообразно изменится. Поскольку скачкообразное изменение входной величины происходит практически мгновенно, т.е.
является скоростью изменения входного параметра и эта скорость равна 0 до и после того момента времени, когда входная величина скачкообразно изменится. Поскольку скачкообразное изменение входной величины происходит практически мгновенно, т.е.  стремится к 0, то значение
стремится к 0, то значение 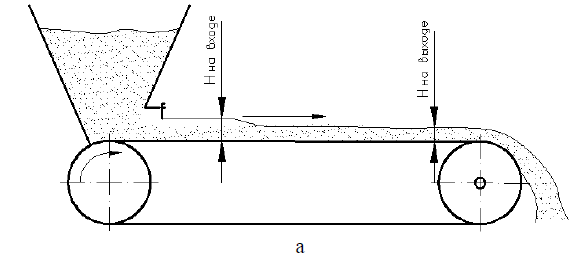
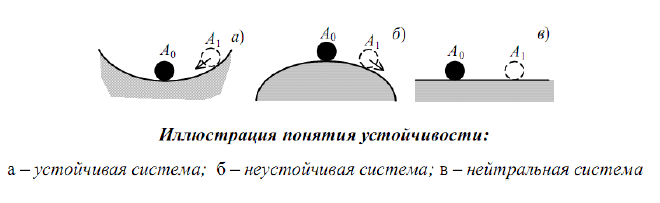 2) Нейтральные − системы, которые после снятия возмущения возвращаются в состояние равновесия, отличное от исходного;
2) Нейтральные − системы, которые после снятия возмущения возвращаются в состояние равновесия, отличное от исходного;