|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Измерение стереоскопической диспаратности
Информационная теория Процесс измерения стереоскопической диспаратности включает три шага: 1) на одном из изображений необходимо выбрать некоторую конкретную 124
ftic. 3.5 Неоднозначность соответствий, устанавливаемых между двумя проекциями изображения на сетчатку. На этом рисунке каждая из четырех точек изображения, сформированного в каждом из глаз, может соответствовать любой из четырех точек проекции, сформированной в другом глазу Из этих шестнадцати допустимых соответствий лишь четыре являются истинными (они представлены зачерненными кружками); остальные двенадцать - ложные цели (незачерненные кружки) Такие неоднозначности не поддаются снятию без привлечения дополнительных ограничений, основанных на анализе глобальной информации. Предполагается, что цели (зачерненные квадратики) соответствуют элементам описания, полученным из изображений в левом и правом глазах 1153] позицию на поверхности, являющейся элементом изображаемой сценьг; 2) на втором изображении необходимо отыскать ту же самую позицию; 3) измерить диспаратность двух соответственных точек изображения. Если эти позиции определяются на обоих изображениях совершенно однозначно, например при выделении на исходной сцене с помощью светового луча, то необходимость в выполнении двух первых шагов отпадает и задача упрощается. В реальных условиях мы не имеем возможности аккуратно помечать поверхность сцены световым пятном, определяя затем местоположение его изображения в обоих глазах, следовательно, необходимо предусмотреть способ его установления, основанный на использовании более пассивных средств восприятия внешней среды. Трудность отыскания соответственных позиций на двух изображениях связана с так называемой проблемой ложной цели. Она возникает в связи с феноменом, который можно было бы определить как предельный случай предложенных Джулесом стереограмм, образованных случайными конфигурациями точек (см. рис. 1.1). Суть этой проблемы иллюстрирует рис. 3.5. Вопрос состоит в том, какая точка какой соответствует. В данном примере левый глаз видит четыре точки и правый глаз видит четыре точки, однако какие из этих точек соответствуют друг другу? Вообще все шестнадцать возможных соответствий пар являются вероятными, но, рассматривая подобную 125 стереопару, мы устанавливаем соответствия, указанные зачерненными кружками, и ни при каких обстоятельствах не устанавливаем соответствия, указанные незачерненными кружками; последние и называют ложными целями. Хотя это в определенной степени объяснимо, тем не менее вызывает удивление. Каким образом нам удается установить, что определенные соответствия правильны, а другие следует игнорировать? Более того, существует и другое решение этой конкретной задачи установления соответствий, которое представляется столь же справедливым. Взгляните на рисунок и постарайтесь увидеть, что же на нем изображено. Альтернативным ответом служат соответствия, указанные четырьмя вертикальными точками, т. е. квадратик R \ объединяется в пару с квадратиком Х4, Л2 — cL 3, R 3 — с Z, 2 иЛ4 cLx. Тем не менее зрительно мы никогда не воспринимаем установленное таким способом соответствие — мы никогда не видим это изображение как некоторый набор квадратиков, расположенных вдоль уходящей вдаль прямой. Почему же мы этого не видим? Почему мы видим лишь другой вариант, когда квадратики выстраиваются в линию, располагаясь на приблизительно одинаковом расстоянии от нас? Опираясь на материал гл. 2, читатель мог бы сразу предложить воспользоваться описаниями изображения, относящимися к высшему уровню, скажем сначала устанавливать соответствие между такими объектами, как два ряда точек в целом, затем переходить к установлению соответствий между отдельными квадратиками и, наконец, между яркостными переходами каждого квадратика. И, как я полагаю, нечто подобное имеет место, но в первую очередь необходимо ясно отдавать себе отчет в том, что такое допущение. Это, по существу, лишь некоторый механизм. На самом деле, вопрос, который следует задать, звучит следующим образом: Почему нечто подобное могло действовать? Сам по себе факт, что мы только смотрим на пару изображений, представленную на рис. 3.5, не дает никаких оснований для исключения соответствий между квадратиками Z, i и R 3, L 2 v. Ri и даже между L3 иR \. Нам необходимо воспользоваться какой-либо дополнительной информацией, которая помогла бы нам установить исходя из налагаемых ею некоторых ограничений, какие соответствия истинны, и для того чтобы сделать это при установлении соответствия между двумя изображениями, нам придется обращаться к изображаемому прототипу реального мира. Необходимы следующие ограничения (на первый взгляд чрезвычайно простые): 1) любая заданная точка реальной поверхности в любой момент времени занимает в пространстве некоторое единственное положение; 2) реальный мир целостен, он разделен на объекты, поверхности которых в общем случае гладки в том смысле, что вариации, вызванные неровностями или иными резкими переходами, которые можно трактовать как изменения расстояния между поверхностью и наблюдателем, малы по сравнению с этим расстоянием. Эти условия отражают свойства реальных физических поверхностей, и они налагают ограничения на характер поведения некоторой точки, выбранной на поверхности. Итак, если мы намерены воспользоваться этими условиями для облегчения установления соответствия между двумя изображениями некото- 126 рой поверхности, необходимо убедиться в том, что рассматриваемые объекты находятся во взаимно однозначном соответствии с точно определенными позициями на некоторой физической поверхности. Для этого следует задать на изображении предикаты, соответствующие " особым приметам" поверхности, теням, нарушениям непрерывности по ориентации поверхности и т. п. Именно исходя из подобных физических соображений мы, как это следует из материала гл. 2, и ввели первоначальный эскиз, именно они обеспечивают возможность использования первоначального эскиза, поскольку входящие в него элементы описания (отрезки прямых и яркостных переходов, пятна, края и нарушения непрерывности, а также характерные объекты изображения, формируемые из перечисленных элементов описания с помощью группировки и классификации) обычно соответствуют объектам, для которых на реальной поверхности существует реальный прототип. И здесь следует, вероятно, подчеркнуть, что, хотя процессы группировки и классификации должны обладать достаточной инвариантностью относителъно того, что они должны группировать и классифицировать, наиболее укрупненные и обобщенные характерные объекты изображения оказываются, вообще, значительно менее надежными, чем самые предварительные и простые средства описания, входящие в необработанный первоначальный эскиз. Это обстоятельство существенно для стереопсиса, в частности, потому, что крупномасштабные характерные объекты изображения довольно велики, вплоть до нескольких угловых градусов, в то время как существенные диспаратности в общем случае достаточно невелики — порядка угловых минут. Следовательно, чем точнее должны быть измерения, тем более мелкие и простые элементы описания оказываются предпочтительными. С другой стороны, явные изменения статистических характеристик, по всей вероятности, служат вполне надежным свидетельством изменений, происходящих в реальном мире, даже на достаточно высоких уровнях и, следовательно, границы, проводимые на высших уровнях и названные мной границами разделения текстур, очевидно, для процесса стереопсиса оказываются полезнее, чем агломерации, относящиеся к тому же самому уровню. Ниже мы столкнемся с тем, что, как я считаю, является следствием этого обстоятельства. Эти физические ограничения можно сформулировать в виде условий, определяющих установление соответствий и ограничивающих допустимые способы сопоставления двух формализованных описаний, которые построены из непроизводных элементов и относятся к одному из глаз соответственно. Для того чтобы условия соответствия выполнялись, элементы сопоставляемых описаний должны соответствовать точно определенным позициям на реальной поверхности изображаемого объекта. Можно считать, что такие элементы описания несут лишь позиционную информацию подобно черным точкам стереограмм, образованных случайными конфигурациями точек, хотя для полного изображения можно задать правила, определяющие, какие соответствия между элементами описания допустимы, а какие — нет. Эти правила выводятся и из физических соображений: если два элемента описания могут порождаться одной и той же особой приметой поверхности, между ними можно устанавливать соответствие. Если же они не могут быть порождены 127 одной и той же особой приметой поверхности, то устанавливать соответствие между ними нельзя. Это — первое наше условие установления соответствия, которое я буду называть условием совместимости. Второе и третье условия установления соответствия отражают два физических ограничения. Условие единственности требует, чтобы каждый элемент описания, за редкими исключениями, мог соответствовать Ттишь одному элементу второго изображения. Указанные исключения могут возникать как следствие процесса формирования изображения, когда две особые приметы объекта расположены на линии визирования одного глаза, другим же глазом они наблюдаются отдельно. Третье условие, непрерывность, означает, что диспаратность изменяется гладко почти везде. Это условие имеет смысл, поскольку второе физическое ограничение предполагает, что расстояние от наблюдателя до видимой поверхности изменяется без нарушений непрерывности, за исключением границ объекта, которые занимают лишь малую часть площади изображения. Итак, эти три условия служат для нас ограничениями. Теперь перейдем к их практическому использованию, высказав гипотезу, которую я буду называть основным допущением стереопсиса: если некоторое соответствие устанавливается между непроизводными элементами, допускающими физическую интерпретацию и относящимися к изображению в левом и правом глазах сцены, которая содержит достаточное число подробностей, и если это соответствие удовлетворяет трем введенным выше условиям установления соответствия, то оно правильно отражает реальное состояние наблюдаемого объекта. Из этого допущения непосредственно следует, что соответствие должно быть единственным. Все это очень хорошо, скажет скептически настроенный читатель. Условия установления соответствия выглядят вполне обоснованными и даже весьма жесткими. Но превращать их в некое основное допущение о том, что они являются не только необходимыми следствиями физических свойств реального мира, а также на самом деле и достаточными для однозначного определения истинного соответствия, — это уже совсем другое дело. Замечание было бы абсолютно справедливым. Оно явно и недвусмысленно указывает на одно из тех методологических положений, которые составляют основу нашего подхода. Дело в том, что введение этого основного допущения и установление его истинности — это именно то, что я подразумеваю, когда говорю об информационной теории некоторого процесса. В данном случае установить достаточность этого допущения труднее, чем установить достаточность допущения о совпадении в пространстве, с которым мы имели дело в гл. 2, поскольку последнее (весьма простое) практически непосредственно следует из структуры реального физического мира. Тем не менее мы в состоянии подтвердить справедливость этого допущения для разнообразных ситуаций. Я попытаюсь сейчас продемонстрировать в общем виде, каким образом строится такое доказательство, так как исходное методологическое положение, к которому приводится эта проблема, исключительно важно. Мы убедимся, что оно лежит в основе теории любого процесса. 128 В приведенную выше формулировку основного допущения стереопсиса входят такие понятия, как " сцена, содержащая достаточное число подробностей" и " непроизводные элементы, допускающие физическую интерпретацию", которые по математическим канонам определены чрезвычайно нестрого. Поэтому для того, чтобы избежать использования понятия " непроизводные элементы, допускающие физическую интерпретацию", я введу специальный тип реальной поверхности — белую поверхность, помеченную черными точками, а для того чтобы избежать использования понятия " сцена, содержащая достаточное число подробностей", я введу условие, предусматривающее довольно высокую плотность размещения точек (обозначим ее через v ). В частности, для иллюстрации нашего доказательства нам потребуется, чтобы плотность v составляла по меньшей мере 2 % или что-то около того. С помощью таких несколько экзотических средств, использование которых аналогично тому, что весь видимый мир покрывается пятнышками черной краски, я преобразовываю реальную сцену в изображения, обладающие неоспоримым сходством с одной из стереограмм Джулеса, образованных случайными точечными конфигурациями. В результате условия установления соответствия задаются для двух бинарных изображений, при этом они принимают форму следующих трех правил: Правило 1. Совместимость. Черные точки могут ставиться в соответствие только черным точкам. Правило 2. Единственность. Почти всегда некоторой черной точке одного изображения можно поставить в соответствие не более одной черной точки другого изображения. Правило 3. Непрерывность. Изменение диспаратности установленных соответствий на изображении гладко почти везде. Теперь наша задача доказать, что эти три правила обеспечивают установление взаимно однозначного соответствия двух изображений, а сделать это мы можем следующим образом. Во-первых, заметим, что, поскольку глаза расположены горизонтально, нам следует учитывать только те допустимые соответствия, которые расположены вдоль горизонтальных прямых; следовательно, задача может быть сведена к простому одномерному случаю, проиллюстрированному рис. 3.6, а. На этом рисунке через Lx обозначены все допустимые координаты точек на сетчатке левого глаза, а через Rx — все допустимые координаты точек на сетчатке правого глаза. Непрерывные вертикальные и горизонтальные отрезки прямых представляют линии визирования левого и правого глаз соответственно; штриховые диагональные прямые обозначают перемещения с постоянной скоростью по изображениям левого и правого глаз, т. е. плоскости постоянной диспаратности. Выполнить доказательство теперь не составит труда, по крайней мере в концептуальном отношении. Правило 1 указывает, что рассматривать следует только черные точки. Правило 3 говорит о том, что истинные соответствия в целом сосредоточиваются на этих диагоналях или вблизи от них, а правило 2 — что в каждой отдельной точке следует выбирать лишь те соответствия, которые располагаются на этих плоскостях постоянной диспаратности. Плотность расположения точек на каждом изображении равна v, так что плотность 129
Рис. 3.6. Lxn Rx ~ координаты, характеризующие положение элементов описания на левом и правом изображениях (а). Сплошные вертикальные и горизонтальные отрезки прямых представляют линии визирования левого и правого глаз. Их пересечения соответствуют допустимым значениям диспаратности. Штриховые диагональные прямые обозначают линии постоянной диспаратности. Кооперативный алгоритм, описываемый в тексте, предусматривает размещение ячейки в каждом узле сети; в этом смысле сплошные прямые представляют тормозящие связи, а штриховые — возбуждающие. Локальная структура произвольного узла сети на рис. 3.6, а приведена на рис. 3.6, б. Этот алгоритм допускает обобщение на двухмерный случай - при этом локальная структура произвольного узла соответствующей сети будет иметь вид, показанный на рис. 3.6, в. Изображенный на нем овал представляет плоский диск, поднимающийся из плоскости страницы [153] 130 допустимых соответствий на истинной плоскости постоянной диспаратности также равна и. в то время как на остальных (" неистинных" ) плоскостях постоянной диспаратности она составляет лишь и2. Следовательно, эти три правила обеспечат получение единственного решения при условии, что диспарат-ность изменяется достаточно медленно, чтобы площадь А, приходящаяся на каждую плоскость постоянной диспаратности, была достаточно великан значение A v существенно отличалось от значений А и2. Итак, поскольку решение единственно (определяется А и—соответствиями), оно правильно отражает физическую реальность, поскольку в этом случае может быть получено только одно решение. Именно это является главным моментом доказательства. Конечно, такая формулировка несколько примитивна и целый ряд деталей требует специального рассмотрения. Доводы, приведенные нами, подтверждают следующие два положения. Во-первых, основное допущение стереопсиса справедливо, и справедливо потому, что входящие в него условия сформулированы на основе доводов, отражающих структуру реального физического мира. И, во-вторых, основное допущение стереопсиса обеспечивает надежный фундамент для определения процесса установления соответствия, так как всякое соответствие, удовлетворяющее этому допущению, с гарантией является истинным. Более того, в обычных реальных ситуациях такое соответствие всегда можно установить. На этом изложение информационной теории стереопсиса заканчивается. Алгоритмы для установления соответствий между изображениями стереопары Кооперативный алгоритм. В подтверждение того положения, что для реализации некоторого процесса можно предложить не один, а несколько различных алгоритмов, мы приведем два алгоритма, обеспечивающих установление соответствий между изображениями стереопары. Первый [153] естественно следует из анализа, проведенного в предыдущем разделе: иллюстрации, представленные на рис. 3.6, облегчат понимание принципа действия этого алгоритма. Как было показано выше, правила 2 и 3 определяют решение задачи установления соответствий. Правило 2, в сущности, сводится к тому, что вдоль каждого из горизонтальных и вертикальных отрезков на рис. 3.6, а допускается установление лишь одного соответствия. Правило 3 указывает, что истинные соответствия проявляют тенденцию к расположению по штриховым диагоналям. Сейчас мы займемся построением параллельной сети взаимосвязанных процессоров, обеспечивающей непосредственную реализацию этих двух правил. В каждое пересечение -узел (см. рис. 3.6, а) — помещается маленький процессор. Идея состоит в том, что узлу, представляющему истинное соответствие пары черных точек, должно быть приписано в конечном счете значение " 1". Если же вершина не представляет истинного соединения -ложная цель, как мы назвали ее выше, — то процессор должен выдавать значение " О". Для реализации наших правил используются связи, устанавливаемые между процессорами. Как нам известно, правило 2 утверждает, что вдоль каждой горизонтальной или вертикальной прямой можно устанавливать лишь одно соответствие. Поэтому все процессоры, расположенные в узлах каждой вертикальной или горизонтальной прямой, должны блокировать друг друга. В результате конкуренции, возникающей на каждой из прямых, лишь один процессор сможет воспроизводить единицу, а все остальные - только нули, и, следовательно, правило 2 будет выполняться. Правило 3 утверждает, что истин- 131 ные соответствия обычно располагаются вдоль пунктирных прямых, поэтому по таким направлениям мы вводим между процессорами возбуждающие связи. В результате структура каждого локального процессора принимает вид, приведенный на рис. 3.6, б. От каждого локального процессора тормозящие (блокирующие) связи направляются к процессорам, расположенным вдоль горизонтальной и вертикальной прямых, приведенных на этом рисунке и соответствующих линиям визирования обоих глаз, а возбуждающие связи направляются вдоль диагонали, представляющей собой линию постоянной диспаратности. Этот алгоритм можно даже обобщить на двухмерный случай - при этом тормозящие связи остаются без изменений, а возбуждающие покрывают некоторую небольшую двухмерную окрестность, в которой диспаратность постоянна. Этот вариант показан на рис. 3.6, е. Настраивается эта сеть следующим образом: рассматриваются два изображения, и значение " 1" присваивается всем допустимым парам черных точек, для которых вообще могло бы быть установлено соответствие - ложным целям и всем до единой допустимым парам; остальным же узлам сети присваивается значение " О". После этого сеть начинает работать. Для каждого процессора суммируются единицы, которыми помечены его возбуждающие связи, и отдельно суммируются единицы, которыми помечены его тормозящие связи; далее полученные значения вычитаются одно из другого (после того, как одна из сумм умножается на соответствующий весовой коэффициент). Если результат вычитания превышает некоторую пороговую величину, процессору присваивается значение " 1", в противном случае ''0" Формально этот алгоритм можно записать с помощью следующего итерационного соотношения:
где ячейки, местоположение которой определяется координатами (х, у), в момент времени t; d - соответствующее значение диспаратности); S (х, у, d ) — локальная возбуждающая окрестность и 0(х, у, d ) - тормозящая окрестность; £ — некоторая постоянная торможения, а О — некоторая пороговая функция. Начальное состояние С0 включает все допустимые соответствия, в том числе ложные цели, в пределах заданного диапазона значений диспаратности В данном случае оно учитывается на каждом шаге итерации (это не необходимо, но алгоритм при этом сходится быстрее). Обратите внимание на то, каким образом геометрическая организация тормозящих и возбуждающих окрестностей О и S обеспечивает реализацию правил 2 и 3. Этот алгоритм позволяет успешно обрабатывать стереопрограммы, образованные случайными конфигурациями точек. На рис. 3.7 показано, как такая сеть с помощью последовательной самоорганизации обеспечивает воспроизведение правильного решения. На рисунке приведены левая и правая стереограммы, начальное состояние сети обозначено через " О", а состояние сети после выполнения п итераций - соответствующим числом Для того чтобы понять, каким образом эти рисунки отображают состояние сети, следует предположить, что наша сеть рассматривается сверху, т. е. точка наблюдения расположена в верхней части рис. 3.6. Слои сети, соответствующие разным значениям диспаратности, располагаются в параллельных плоскостях, так что наблюдатель смотрит сквозь них вниз. Часть узлов, расположенных в каждой из этих параллельных плоскостей, возбуждена, а часть - заторможена. Каждому из семи слоев сети приписывается отдельный уровень серого тона, и поэтому некоторый возбужденный узел, принадлежащий верхнему слою (соответствующему диспаратности, составляющей +3 пиксела), вводит в изображение черную точку, а некоторый возбужденный узел, принадлежащий самому нижнему слою (соответствующему диспаратности, составляющей -3 пиксела), 132
Рис. 3.7. Расшифровка стереоскопической пары изображения, образованных случайными конфигурациями точек, с помощью кооперативного алгоритма. Стереоскопическая пара изображений (стереограммы) помещена в верхней части рисунка; исходное состояние сети, включающее все допустимые соответствия в пределах заданного диапазона значений диспаратности, обозначено меткой " О". Алгоритм вьшолняет ряд итераций (результаты некоторых из них представлены на рисунке), постепенно выявляя искомую структуру. Различные уровни зачерненности изображения соответствуют различным значениям диспаратности 133
Рис. 3.8. Алгоритм, применение которого проиллюстрировано рис. 3.7, можно также использовать для расшифровки и заполнения чрезвычайно слабоэаполненныхстереограмм. На данном рисунке плотность заполнения составляет 5 % вводит в изображение белую точку. В начальном состоянии (нулевая итерация) сеть неорганизованна, конечное же ее состояние соответствует устойчивой упорядоченности (14-я итерация); в результате обнажается структура, напоминающая перевернутый свадебный торт. Плотность заполнения стереограммы точками в данном случае составляет 50 %. 134 Алгоритм, заданный приведенным выше итерационным соотношением, можно применять для расшифровки стереограмм, образованных случайными конфигурациями точек с плотностью заполнения от 50 до менее 10 %, взяв в качестве значений параметров те же, что использовались в примере на рис. 3.7. При таких и меньших плотностях заполнения сходимость алгоритма уменьшается. Если допустить возможность использования какого-либо простого геометрического механизма для управления зависимостью пороговой функции σ от усредненной активности сети (числа возбужденных ячеек) на каждой итерации, то данный алгоритм оказался бы пригоден для расшифровки стерео-грамм с очень низкой плотностью заполнения точками. В нашем втором примере, который приведен на рис. 3.8, плотность заполнения стерео граммы точками составляет 5 % и значение диспаратности центрального квадрата относительно фона составляет -2 пиксела. Алгоритм обеспечивает заполнение областей, в которых не имеется ни одной точки, но при этом для получения решений, подобных тем, что мы имеем при плотности заполнения 50 %, требуется выполнить на несколько итераций больше. Рассматривая сла-бозаполненные стереограммы, мы воспринимаем контуры четче, чем это делает алгоритм. Это, вероятно, объясняется тем, что между точками, расположенными на границах объектов, возникают субъективные контуры. Эти параметры способствуют интуитивному пониманию работы алгоритма. Судя по всему, он " не испытывает никаких затруднений" при обработке стереограмм, но одного этого обстоятельства недостаточно, для того чтобы считать его надежным. Нам, однако, удалось придать ему интеллектуальную респектабельность: проанализировав математические свойства этого алгоритма [152], мы показали, что состояния, удовлетворяющие условиям правил 2 и 3, являются устойчивыми состояниями алгоритма, и продемонстрировали сходимость алгоритма в широком диапазоне значений его параметров. Мы рассмотрели пример кооперативного алгоритма, названного так из-за использованного в нем способа достижения глобального результата с помощью хорошо отрегулированной " кооперации" локальных операций. Кооперативные явления хорошо известны в физике, скажем предложенная Изингом- модель ферромагнетизма, сверхпроводимость и фазовые переходы. Кооперативные алгоритмы обладают многими общими с этими явлениями свойствами. Кооперативные алгоритмы и задача установления соответствия между изображениями стереопары. Вплоть до 1977 года почти все стереоалгоритмы, представляемые как модели, ориентированные на процесс стереопсиса у человека, основывались на гипотезе Джулеса о том, что процесс установления соответствия между изображениями стереопары - это некоторое кооперативное явление [113, с. 203; 115; 174; 39; 85; 222; 153]. Два исключения составляют программа AUTOMAP Джулеса II12], в основу которой положен метод, предусматривающий выделение кластеров, и модель Сперлинга [218], основанная на корреляции уровней серого тона, но вносящая интересный вклад в изучение связи стереопсиса с вергентными движениями глаз. Анализ всех этих работ приводит к одному весьма примечательному выводу: не считая нашего алгоритма, в основу которого положен информационный подход, ни одно описание указанных алгоритмов не сопровождается анализом соответствующих информационных аспектов задачи установления соответствия между изображениями стереопары. Непосредственным следствием этого обстоятельства является то, что ни один из алгоритмов не дает верного результата, так как, по меньшей мере одно из условий основного допущения стереопсиса либо не учитывается, либо неправильно реализовывает-ся. Модель Сперлинга основана на корреляции уровней серого тона, что, как мы убедились, неверно и из-за чего эта модель не реализована. Сперлингу не удалось определить размеры и расположение окрестностей, на которых должна осуществляться корреляция. Именно в связи с этим и возникают проблемы. 135
б) в) Рис. 3.9. В некоторых из известных кооперативных стереоалгоритмов предусматривается использование только одного набора тормозящих связей между детекторами, соот-" ветствующими различным значениям диспаратности и относящимися к одной и той же позиции сетчатки. Если представить эти связи в том же, что и на рис. 3.6, виде, становится очевидно, что они воспроизводят иные ограничения: вместо запрещения установления двух соответствий на каждой линии визирования, как это было в случае, представленном на рис. 3.6, эти связи запрещают установление двух соответствий по любому радиусу, исходящему из позиции, занимаемой наблюдателем. Такой способ организации процесса установления соответствий между изображениями стереопары неверен Алгоритм Дев заслуживает внимания как одна из первых попыток точного претворения в жизнь идей Джулеса [39, уравнения 1 и 2). В этом алгоритме реализованы правила 2 и 3, однако первое из них - в неправильной модификации. Вместо двух тормозящих связей, по одной на каждую линию визирования, Дев использовала в своем алгоритме одну тормозящую связь, разделяющую пополам угол между линиями левого и правого глаз. Этот алгоритм, который иллюстрирует рис. 3.9, следует сопоставить с геометрической организацией, представленной на рис. 3.6. Физически соединения, показанные на рис. 3.9, соответствуют некоторому варианту правила, утверждающего, что наблюдатель, куда бы он ни направлял взгляд, увидит только одну поверхность. Вообще говоря, это неверно: когда Вы смотрите, например, на неглубокое озеро, Вы видите две поверхнос- 136 ти - поверхность озера и его дно. В правильном варианте (см. рис. 3.6) такое правило гласит, что любые заметные характерные особенности находятся либо на поверхности озера, либо на его дне (либо, возможно, на теле какой-то рыбы, плавающей на озере), но обязательно лишь на одной из этих поверхностей. В алгоритме Сугиэ и Сувы [222] частично реализовано правило 3 и использована все та же неверная модификация правила 2. Нелсон [174] не предложил никакого варианта алгоритма и не воплотил своих идей, однако он, очевидно, также имел в виду некоторый алгоритм, использующий неправильную модификацию правила 2. Хираи и Фукуси-ма [85] правильно использовали правило 2 (с. 48, функция (1)), но отказались от использования правила 3, предпочтя ему сеть, " благосклонную" к решениям, соответствующим меньшим значениям параллакса. Джулесу в своей программе AUTOMAP [П2] не удалось реализовать правило 2, но правило 3 в ней неявно используется для выделения кластеров. Больший интерес вызывает дипольная модель Джулеса. Она представляет собой физическую аналоговую модель, в которой для представления левого и правого изображений стереопары используются две сетки (по одной на каждое изображение), образованные магнитными стрелками (магнитными диполями); для каждой характерной особенности каждого изображения, подлежащей установлению соответствия, в сетке предусмотрена отдельная магнитная стрелка. Ориентация стрелок такова, «то при наложении двух таких сеток они могут располагаться острием в направлении соседних позиций сетки, представляющей второе изображение. В каждой из сеток концы соседних стрелок соединены пружинками, и полярность каждой магнитной стрелки (северная или южная) выбирается в соответствии с яркостью изображения (черное или белое) в этой позиции. Идея, положенная в основу гакой модели, состоит в том, что при приближенном установлении соответствий с помощью наложения сеток, представляющих левое и правое изображения, магнитное притяжение, которое возникает между аналогично расположенными группами стрелок, приведет к стабилизации каждой сетки; в результате стрелки каждой сетки будут указывать на правильно соответствующие им стрелки второй сетки. Хотя соотношение полярностей магнитиков и значений яркостей сетчатки неизвестны, за исключением " случая стереограмм, образованных случайными конфигурациями точек, в дипольной модели в неявном виде реализована единственность, т. е правило 2, поскольку в любой момент времени некоторый определенный диполь может иметь лишь одну ориентацию. Соединение кончиков соседних диполей пружинкой обеспечивает реализацию условия непрерывности правила 3. Данная модель, следовательно, в наибольшей степени удовлетворяет нашим требованиям, однако в отличие от других кооперативных моделей не представляет в явном виде всех допустимых узлов структуры, приведенной на рис. 3.6, а. В сущности, в данном случае на каждый вертикальный и горизонтальный отрезки этой структуры приходится лишь по одному процессору, а отдельным узлам, расположенным на них, соответствуют различные углы, под которыми располагается этот единственный диполь. Было бы интересно узнать, может ли такая модель работать. Затронул же я эту тему лишь для того, чтобы подкрепить свой общий тезис, состоящий в том, что интеллектуальная строгость используемого метода имеет решающее значение при изучении возможностей обработки информации зрительной системой. Если информационная основа некоторого процесса сформулирована неверно, то соответствующий алгоритм почти наверняка окажется неверным. И наконец, ни для одного из упоминавшихся алгоритмов не была продемонстрирована возможность работы с естественными изображениями. Механизм корреляции уровней серого тона обладает определенной работоспособностью, однако при его использовании возникают ошибки, исправлять которые должен человек-оператор. Что касается других методов, то для них не определен вид входного представления, хотя следует от- 137
Рис. 3.10. Высокочастотные компоненты спектра этой стереограммы находятся в состоянии " соревнования" в отличие от низкочастотных, которые могут достигать слияния. В этом случае следует предположить, что в процессе стереопсиса участвуют независимые каналы, настраиваемые на различные значения пространственных частот [116] метить, что Марр и Поджо [153] указывали на пригодность использования в качестве такого представления первоначального эскиза. Биологические данные. Все обсуждавшиеся в предыдущем разделе алгоритмы предназначены для выбора правильных соответствий в тех случаях, когда ложных целей очень много. Поэтому, за исключением, быть может, первых вариантов дипольной модели Джулеса, ни в одном из них движения глаз не учитываются, гак как вообще они дают возможность интерпретировать стереограммы, образованные случайными конфигурациями точек без учета этих движений. Движения глаз человека, однако, представляются существенными для стереоскопического зрения человека. На самом деле, без таких движений человек может воспринимать лишь очень небольшую глубину - область, в которой достижимо слияние1 двух изображений (ее называют фузионной зоной П*-нума2 порядка 6 - 18'[47, 115]), что почти полностью исключает возможность восприятия любых структур [199], за исключением случаев малых значений диспаратности [165]. Для сложных стереограмм типа спирали Джулеса [113, рис. 4.5-4] движения глаз, возможно, оказываются существенными [51, 209] и чрезвычайно удивительно, что, несмотря на известные старые результаты Фейдера и Джулеса, психофизики до недавнего времени уделяли так мало внимания движениям глаз. Известно еще несколько психофизических явлений, которые было бы трудно объяснить с помощью рассмотренных нами алгоритмов. Некоторые люди, например, в состоянии справляться с ситуациями, когда одно из изображений увеличивается в размерах на 1 В отечественной литературе, посвященной психологии зрительного восприятия, процесс построения единого зрительного бинокулярного пространства посредством слияния монокулярных пространств иногда называют фузией, рассматривая ее как одну из разновидностей сенсорной реакции на диспаратность. - Прим. перев. 2 В отечественной литературе, посвященной психологии зрительного восприятия, эту область обычно называют просто зоной Панума. - Прим перев. 138 15 % [113, рис 3.10-3] Это, однако, всего лишь наиболее яркая демонстрация явления, которое может проявляться и по-другому На самом деле, человек может одновременно воспринимать бинокулярное " соревнование" и слияние отдельных составляющих спектра стереограммы, в чем читатель может убедиться, обратившись к рис 3 10 [117; 113, разд 3 9 и 3 10; 116; 162] Подобные наблюдения приводят к очень интересной гипотезе на определенном этапе обработки зрительной информации передача информации, характеризующей диспаратность, производится по специальным каналам стереопсиса, настраиваемым на различные частоты и перекрывающим приблизительно полторы октавы (эти каналы, в сущности, очень сильно напоминают операторы V 2 G с рецептивными полями различных размеров, с которыми мы имели дело в гл 2) Среди других представляющих интерес результатов следует отметить физиологические, клинические и психофизические данные, относящиеся к гипотезе Ричардса о двух группах [196, 197, 200, 183, 35] Основной результат Ричардса состоит в том, что стерео-слепота проявляется как " слепота" относительно любых конвергентных диспаратнос-тей, любых дивергентных диспаратностей или относительно и тех и других Кстати, различные стереоаномалии распространены чрезвычайно, широко, охватывая до 30 % людей Другими словами, стереодетекторы организованы, очевидно, в две группы, одна из которых должна обеспечивать восприятие конвергентных, а другая - дивергентных диспаратностей, причем, возможно, существует и третья группа, предназначенная для восприятия нулевой диспаратности Данные нейрофизиологов свидетельствуют приблизительно то же самое - существуют, грубо говоря, три класса нейронов, настраиваемых на определенную диспаратность класс, настраиваемый на конвергентную диспаратность (так называемые нейроны малой удаленности), класс, настраиваемый на дивергентную диспаратность (так называемые нейроны большой удаленности), и третий класс, настраиваемый на близкие к нулю значения диспаратности Диапазоны значений диспаратности, на которые настраиваются нейроны первых двух классов, достаточно велики, в то время как нейроны третьего класса характеризуются острой настройкой Эти данные противоречат представлению реализации рассмотренных выше алгоритмов на нейронном уровне, поскольку, не считая дипольной модели, все они предусматривают использование большого числа " нейронов-детекторов диспаратности", максимальная чувствительность которых перекрывает значительно больший диапазон значений диспаратности, чем обеспечивают кривые настройки отдельных нейронов И наконец, еще одно замечание, касающееся причин, побудивших нас обратиться к подходу, который предусматривает использование кооперативных алгоритмов Как мы уже отмечали, все реализованные в нем идеи возникли под влиянием одного результата Фейдера и Джулеса [47] - демонстрации наличия явления гистерезиса в процессе стереопсиса В своих экспериментах они стабилизировали изображение относительно движений глаз и показали, что при условии возникновения слияния двух изображений их можно " раздвигать" без нарушения слияния вплоть до значения диспаратности порядка 2° Если же, однако, слияние нарушается, то для его восстановления необходимо снова начать совмещение изображений, вернув их в область 6 — 14' Гистерезис является одной из особенностей кооперативных алгоритмов, и поэтому заполнение промежутков также, очевидно, проявляется в процессе стереопсиса (как читатель уже имел возможность убедиться, стереограммы с малой плотностью заполнения, подобные приведенной на рис 3 8, воспринимаются как некоторая гладкая твердая поверхность, а не как несколько отдельных точек, подвешенных в пространстве) Исходя из этого все, в том числе Джулес и мы, обратились к кооперативному алгоритму Для подобного шага тем не менее не было особых оснований В конечном счете, важнейшим результатом данного эксперимента Фейдера и Джулеса было подтверждение наличия гистерезиса при значениях диспаратности порядка двух градусов, в то время как 139 соответствие устанавливается при 20! Следовательно, представляется маловероятным возникновение гистерезиса как результата процесса установления соответствий и значительно более вероятным, что его можно приписать работе корковой памяти, запоминающей результаты, получаемые при установлении соответствия, но действующей независимо от последнего процесса. Фендер и Джулес даже выступили с такой гипотезой. Конечно, это не исключает возможности использования механизма кооперативное™ в процессе установления соответствия, и так называемый эффект распространения, описанный позже Джулесом и Чаном [115], служит, очевидно, подтверждением его наличия. Вьшод же, однако, состоит в том, что не следует, возможно, придавать такое значение нашим представлениям, связанным с кооперативными процессами, и целесообразно обратиться к совсем иному подходу к проблеме стереопсиса. Второй алгоритм. Основная проблема, которую приходится решать при достижении бинокулярного слияния, — это устранение ложных целей или разработка способа, обеспечивающего возможность их не рассматривать. Сложность этой проблемы определяется двумя факторами: изобилием на изображении признаков, подходящих для использования в процессе установления соответствия, и диапазоном значений диспаратности, в пределах которого последний процесс разворачивается. Если какой-либо признак встречается на изображении достаточно редко, то в процессе установления соответствия может оказаться просмотренным достаточно большой диапазон значений диспаратности, прежде чем поиск приведет к встрече с ложной целью, если же, однако, признак является стандартным либо критерий, используемый при установлении соответствия, определен не очень точно, то ложные цели могут встречаться уже при просмотре совсем небольшого диапазона значений диспаратности. В таком случае для упрощения задачи установления соответствий следует уменьшить " область определения" признаков, подходящих для использования в процессе установления соответствий, т. е. необходимо сделать признаки редкими событиями. Добиться этого можно двумя способами. Первый — сделать их очень сложными или придать им чрезвычайно специфический вид, с тем чтобы даже при высокой плотности их распределения на изображении число их разновидностей оказалось бы столь велико, что сопоставимая пара возникала бы редко. Второй способ состоит в значительном уменьшении плотности распределения на изображении всех признаков, скажем, с помощью понижения степени пространственного разрешения при изучении изображения. Из работы Джулеса, посвященной стереограммам, образованным случайными конфигурациями точек, известно, что перспективы первого подхода весьма проблематичны. Мы знаем, что установление соответствия — локальная процедура, если все яркостные переходы строго вертикальны или горизонтальны и имеют один и тот же контраст, и, следовательно, использование даже очень специфических критериев не очень поможет нам. Более того, это привело бы к существенному ухудшению результатов при работе с реальными изображениями, у которых ориентации и контрасты двух соответствующих друг другу яркостных переходов могут поразительным образом отличаться. Читатель, обратившись к рис. 3.11, сам может убедиться в том, что стереограммы с различными контрастностями поддаются слиянию. Контрасты, однако, должны иметь один и тот же знак. Критерии ориентации также весьма нестроги. 140
Рис. 3.11. Несмотря на то, что контрастности левого и правого изображений различны, их слияние все же оказывается возможным Более перспективным, однако, представляется другой способ. Действительно, тот факт, что при бинокулярном слиянии используются независимые каналы, настраиваемые на различные пространственные частоты, снова привлекает к себе внимание, представая в совершенно новом свете, поскольку это означает, что при слиянии используются несколько вариантов одного и того же изображения, получаемых с помощью последовательного уточнения фильтрации. В результате обеспечивается увеличение разрешения по диспаратности и в конечном счете - достижение очень высокой степени такого разрешения за счет уменьшения диапазона значений диспаратности. Примечательным свойством любой системы, реализующей указанные механизмы, является использование движений глаз при построении подробной и точной карты дис-паратностей для двух точек наблюдения. Дело в том, что наиболее точные значения диспаратности дают каналы высокого разрешения и, следовательно, становятся существенны движения глаз, так как каждая часть сцены должна в конечном счете попасть в тот малый диапазон значений диспаратности, в котором действуют эти каналы высокого разрешения. Важность вергентных движений глаз связана также и с тем, что этими движениями можно управлять с высокой точностью [201, 190]. Такие данные позволяют предложить следующую схему для решения задачи слияния: 1) каждое изображение анализируется с помощью каналов, характеризующихся различной точностью, и соответствия устанавливаются между результатами, полученными в каналах одинаковой точности по каждому из обоих глаз для значений диспаратности, соответствующих порядку разрешения канала; 2) каналы с малым разрешением управляют вергентными движениями глаз, обеспечивая синхронизацию работы точных каналов. В этой схеме отсутствует гистерезис и, следовательно, не учитываются результаты Фендера и Джулеса [47]. С другой стороны, согласно развиваемой нами теории промежуточного уровня обработки информации в зрительной системе основной целью нижнего уровня обработки зрительной информации является построение своего рода карты ориентаций-глубин для всех поверхностей, которые доступны взору наблюдателя (см. гл. 4). Она объединяет данные, полученные с помощью ряда различных и, очевидно, независимых процессов, которые позволяют интерпретировать информацию, заключенную в диспаратности, движении, тенях, текстуре и контурах. На рис. 3.12 приведено 14 Г а) б) Рис. 3.12. Иллюстрация понятия 2, 5-мерного эскиза. На рис. 3.12, а изображены в перспективе маленькие квадратики, характеризующиеся различными ориентациями относительно наблюдателя. Точки со стрелками условно представляют ориентации этих поверхностей. На рис. 3.12, б эгто же условное представление использовано для указания ориентации двух цилиндрических поверхностей, расположенных на перпендикулярном к наблюдателю фоне. Полный 2, 5-мерный эскиз должен включать приближенные значения расстояний до поверхностей, а также их ориентации, контуры, на которых ориентации поверхности претерпевают резкие изменения (эти контуры изображены точками), и контуры, на которых происходит нарушение непрерывности по глубине (субъективные контуры, они изображены сплошными линиями). Подробные данные приведены в гл. 4 [151] представление, реализующее идею такой карты и названное Марром и Нисихарой 2, 5-мерным эскизом [151]. Предположим теперь, что гистерезис, обнаруженный Фейдером и Джулесом, возникает ie в результате некоторого кооперативного процесса, действующего при установлении соответствий изображений стереопары, а является следствием использования некоторого буферного запоминающего устройства типа 2, 5-мерного эскиза для хранения карты глубин изображения после того, как она построена. В таком случае процесс установления соответствий не должен обязательно носить кооперативный характер (даже если он еще мог бы быть таковым) — необязательно даже, чтобы при этом процесс установления соответствий реализовывался на всем изображении одновременно, если карта глубин видимой поверхности построена и введена в указанное промежуточное запоминающее устройство Мы можем теперь завершить построение своей схемы, добавив к ней следующие два этапа: 3) после того как некоторое соответствие установлено, оно фиксируется и включается в 2, 5-мерный эскиз; 4) существует некоторая разновидность обратной связи между запоминающим устройством и каналами, проявляющейся в управлении движениями глаз, которое дает наблюдателю возможность легко подвергать слиянию любой участок поверхности при условии, что карта ее глубин введена в запоминающее устройство. Идея начать процесс с установления соответствий для затрубленных и силь- 142
но разнесенных признаков, а затем, используя полученную таким образом информацию, повторять этот процесс при более высоких уровнях разрешения выглядит многообещающе, однако какие признаки следует сопоставлять при этих различных уровнях разрешения? Нам известно достаточно много о предварительном этапе обработки зрительной информации, для того чтобы иметь возможность предлагать различные варианты. Следует ли обратиться к пересечениям нулевого уровня, необработанному первоначальному эскизу, полному первоначальному эскизу, или целесообразно использовать какую-нибудь комбинацию этих представлений? Поджо и я предложили, что исходное представление для процесса установления соответствий между изображениями стереопары должно включать необработанные пересечения нулевого уровня, снабженные указаниями о знаке изменения контраста и их приближенной ориентации на изображении, и концы (локальные нарушения непрерывности), также снабженные указаниями о контрасте и, возможно, об очень приближенных значениях ориентации. Процесс установления соответствий между изображениями стереопары. Выбор исходного представления приводит.к алгоритму установления соответствий между изображениями стереопары, работа которого проиллюстрирована рис. 3.13 и 3.14. На них приведены результаты обработки на ЭВМ (работа выполнена Э. Гримсоном) пары стереограмм, образованных случайными конфигурациями точек — такие стереограммы являются одним из наиболее трудных для данного алгоритма видов представления исходных данных. Левое и правое изображения, составляющие стереограмму, образованную случайными конфигурациями точек и имеющую плотность заполнения 50%, приведены в верхней части рис. 3.13. Первый шаг данного алгоритма состоит в применении V2 G-фильтра с большим рецептивным полем к каждому из этих изображений и определении пересечений нулевого уровня точно так, как это делалось в гл. 2. Хотя теоретически элементы изображений, между которыми должно устанавливаться соответствие, включают как пересечения нулевого уровня, так и концы, лишь первые порождают трудности, связанные с ложными целями. Так, на рис. 3.14 представлены лишь пересечения нулевого уровня, причем горизонтальные отрезки фактически игнорируются, поскольку простыми средствами процесс установления соответствия для них реализовать не удается. Для пересечений нулевого уровня помимо их местоположений задаются также знак и приблизительная ориентация. Этот знак характеризует знак изменения контраста при переходе через пересечение нулевого уровня слева направо и определяется уровнем серого тона, который на изображении соответствует пересечению нулевого уровня. Между двумя пересечениями нулевого уровня можно устанавливать соответствие, если у них одинаковые знаки и их локальные ориентации отличаются не более чем на 30°. Собственно процесс установления соответствия осуществляется вдоль пересечений нулевого уровня поточечно. На рис. 3.14 приведены результаты свертки и пересечения нулевого уровня (со знаками), полученные при использовании V2 G-фильтров с рецептивными 143
Рис 3 13 Решение для случайной конфигурации точек с 50 %-ным заполнением В верхней части рисунка представлены левое и правое изображения. Ниже в прямоугольной проекции представлены три карты диспаратности, построенные при установлении соответствий между описаниями пересечений нулевого уровня, приведенных на рис 3 14. Точка изображения с координатами (х, у) и приписанным ей значением диспаратности d представляется в згой трехмерной системе как точка с координатами (х, у, d ) Таким образом, высота светлой точки над плоскостью указывает ее значение диспаратности полями трех различных размеров Читатель имеет возможность убедиться в том, что канал с наименьшим рецептивным полем дает значительно больше пересечений нулевого уровня, чем канал с наибольшим рецептивным полем. Это значит, что при использовании каналов с большими рецептивными полями диапазон рассматриваемых значений диспаратности можно увеличить, не рискуя одновременно увеличить частоту встреч с ложными целями. 144 Рис 3 14 Результаты процедур свертки и определения пересечений нулевого уровня для стереограммы, представленной на рис 3 13 В двух левых столбцах сверху вниз приведены результаты свертки левого и правого изображений с фильтром с рецептивными полями размером vv2_Z> = 35, 17 и 9 соответственно В двух правых столбцах представлены пересечения нулевого уровня, полученные на основе результатов процедуры свертки, приведенных в двух левых столбцах Обратите внимание на то, насколько больше подробностей выявляют рецептивные поля меньших размеров Следовательно, рис. 3.13 и 3 14 дают возможность составить представление об общей структуре алгоритма. Вначале процесс установления соответствий реализуется на изображениях, обработанных фильтром с большим рецептивным полем; результаты этого шага алгоритма приведены на рис. 3.13, а, представляющем собой итоговую карту диспаратности, изображенную в прямоугольной проекции Эти первые приближенные результаты служат исходными данными для того же самого процесса установления соответствия, но уже для канала с рецептивным полем среднего размера. Уменьшение допустимого диапазона значений диспаратности приблизительно компенсируется объемом информации, полученной благодаря использованию канала с большим рецептивным полем. Затем строится карта диспаратности, приведенная на рис. 3.13, б. Далее применяется канал с малым рецептивным полем, небольшой диапазон значений диспаратности которого позволяет получать точные значения диспаратностеи; соответствующие результаты приведены на рис 3.13, е. В данном примере диспаратность центрального квадрата состав- 145
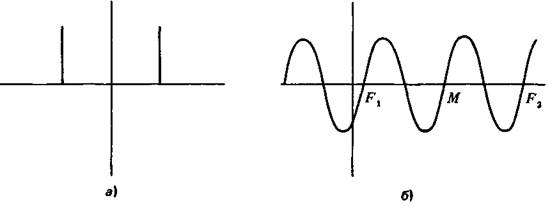
Рис. 3.15. Пересечения нулевого уровня при переходе отрицательной полуволны чисто синусоидального сигнала в положительную полуволну (или при переходе положительной полуволны в отрицательную) обязательно разделены промежутком \, где \ - длина волны ляет 12 пикселов, а размер каждого черного квадрата — соответственно 4X4 пикселов. В итоговой карте диспаратности соответствие установлено неверно менее чем у 0, 1 % точек, причем все они расположены на границах квадрата. Еще о свойствах пересечений нулевого уровня. Данный алгоритм проблему ложных целей решает обходным путем, однако представляет интерес, как именно это делается, что очень важно с точки зрения психофизики. Мы не будем приводить здесь доказательства, но общую линию можно изложить и не вдаваясь в особые технические детали. Основную идею иллюстрирует рис. 3.15. Допустим, что яркость изображения изменяется строго синусоидально, образуя вертикально ориентированную синусоидальную дифракционную решетку. Фурье-преобразование такого сигнала приведено на рис. 3.15, а. Этот сигнал не изменяется, пройдя через V2 G-фильтр (его одномерное поперечное сечение приведено на рис. 3.15, б). Поскольку теперь задача сводится к установлению соответствий между пересечениями нулевого уровня для двух подвергнутых фильтрации изображений, допустим, что мы остановились на некотором конкретном пересечении нулевого уровня, принадлежащем левому изображению и соответствующем переходу от отрицательной к положительной полуволне синусоиды. Правильное соответствие для этого нулевого уровня обозначено на рис. 3.15, б через М. В таком случае Fx и F2 обозначают ложные цели. Так как, однако, они также должны представлять переход от отрицательной к положительной полуволне синусоиды, их следует разделить по меньшей мере расстоянием X, где X — длина синусоидальной волны. Итак, при условии ограничения поиска допустимых соответствий диапазоном значений диспаратности, не превышающим значения X, имеется гарантия, что мы встретим лишь одно допустимое ■ соответствие, и если какие-то иные средства позволяют нам приблизительно определять область, в которой следует вести поиск, то можно быть уверенным в том, что то единственное соответствие, которое будет нами обнаружено, является правильным. 146
Рис 3.16. В некотором диапазоне сигнал изменяется случайным образом (в). После прохождения через V2 G-фильтр он принимает другой вид (б), причем пересечения нулевого уровня имеют более или менее регулярный характер Аналогичный пример для идеального однооктавного полосового фильтра приведен на рис. 2.19. При прохождении сигналов с ограниченным спектром через v2 G-фильтр или идеальный однооктавный фильтр получаемые пересечения нулевого уровня, в среднем, не могут располагаться ни слишком близко, ни слишком далеко друг от друга. Интервалы, разделяющие пересечения нулевого уровня, подчиняются статистическим закономерностям, которые иллюстрируются рис. 3.17 Такова основная идея, но разнообразие реального мира не сводится к синусоидальной дифракционной решетке. Синусоидальная волна — это просто предельный случай функции с ограниченным спектром, в котором ширина полосы частот равна нулю. Приведенные выше качественные рассуждения сохраняют силу и при более широкой полосе частот, в чем в первом приближении можно убедиться, обратившись к рис. 2.19 и 3.16. Рассмотрим, в частности, идеальный однооктавный полосовой фильтр, результат применения преобразования Фурье к которому приведен на рис. 2.19, б. Пример типичного сигнала на выходе такого фильтра показан на рис. 2.19, е. Среднее значение такого сигнала равно нулю, и, следовательно, сигнал пересекает нулевой уровень достаточно часто, подобно тому как это происходит в случае синусоидальной волны. Поскольку, однако, спектр этого сигнала ограничен, его пересечения нулевого уровня не могут отстоять достаточно далеко друг от друга. Их частота, в среднем, соответствует среднему значению полосы частот фильтра. Для нас же важно то обстоятельство, что пересечения нулевого уровня, в среднем, не могут располагаться слишком близко друг к другу, причем это справедливо для любого полосового фильтра. Однако V2 G-фильтр также является лишь некоторой аппроксимацией полосового фильтра — читатель может убедиться в этом, если не сочтет за труд вновь обратиться к одномерному преобразованию Фурье этого фильтра, приведенному на рис. 2.9, е. На рис. 3.16, б представлены результаты применения V2 G-фильтрак случайному одномерному сигналу (рис. 3.16, д); очевидно, что этот сигнал после фильтрации обладает теми же качественными характеристиками, что и сиг- 147 нал, приведенный на рис. 3.15, его среднее значение равно нулю, а пересечения нулевого уровня располагаются не слишком далеко и не слишком близко. Общая идея доказательства теперь совершенно ясна — она в точности соответствует идее доказательства, относящегося к случаю синусоидальной волны. Поскольку V2 G-фильтр представляет собой некоторую аппроксимацию полосового фильтра, пересечения нулевого уровня сигнала на его выходе обычно разделены некоторым минимальным расстоянием. При условии, что нам приблизительно известно, где именно следует искать соответствие, и при условии, что поиск не должен охватывать чрезмерно большой диапазон, мы сможем обнаружить единственного кандидата на соответствие, и это соответствие будет правильным. Таким образом, открьюается путь для перспективного подхода к решению задачи установления соответствия, и, помимо этого, возникает еще одна, и весьма привлекательная, возможность. С точки зрения психофизики V2 G фильтр является монокулярным устройством, а процесс установления соответствия бинокулярен. Это означает, что значения параметров V2 G-фильтров (например, ширина их рецептивных полей vv^^, ) определяются с помощью чисто монокулярных измерений. Диапазон значений диспаратности, в котором развертывается процесс установления соответствий (обычно его называют фузионной зоной Панума; мы будем обозначать его через V), является • понятием сугубо бинокулярным. Если наша теория верна, она должна давать возможность в явном виде прогнозировать новые соотношения между этими априорно не связанными величинами, которые измеряются совершенно различными способами. Следовательно, появляется прекрасный способ проверить нашу теорию. Итак, требуется вывести точные количественные соотношения, связывающие, как мы полагаем, ширину рецептивного поля w ^_ D и размеры фузионной зоны Панума V. Для того чтобы иметь возможность сделать это, нужны некоторая количественная модель каналов, используемых на предварительном этапе обработки зрительной информации, и какой-либо способ оценки возможных интервалов между пересечениями нулевого уровня. Вероятно, следует отметить, что собственно идея почерпнута из нашей предыдущей работы, посвященной первоначальному эскизу [145]. В этой работе большинство клеток, действующих на начальном этапе зрительного пути, рассматриваются не как устройство для обнаружения признаков, а как дифференциальные операторы. Определение Хьюбелом и Уиселом [95] простой кортикальной клетки в качестве линейного устройства привело нас, в частности, к представлению о полосообразном рецептивном поле как о некотором операторе, реализующем вычисление второй призводной по определенному направлению, что и составляет основу для последующего нахождения пересечений нулевого уровня. Лишь позже мы осознали, что сами простые клетки, вероятно, и являются устройствами для определения пересечений нулевого уровня, как это показано на рис. 2.18 (см. также разд. 3.4). С математической точки зрения эта небольшая путаница не имеет значения, поскольку при очень слабых допущениях обе точки зрения оказываются эквивалентными 148 (см. работу Марра и Хилдрет [150, Приложение А]). С точки же зрения реализации и, следовательно, психофизики это достаточно разные вещи. Позже мы еще вернемся к этой теме. Итак, проведение нашего анализа требует для фильтров, которые используются в зрительной системе человека, наличия некоторой количественной оценки расстояний, разделяющих пересечения нулевого уровня. В то время когда была сформулирована данная теория стереозрения, основанная на установлении соответствий для различных уровней разрешения, мы еще не знали, что V2 G-фильтр является оптимальным выбором, но нам уже было известно нечто столь же перспективное, поскольку X. Уилсон только что предложил свою четырехканальную модель структуры каналов. Для их описания он воспользовался РГР — разностью двух гауссовых распределений, которая, как можно убедиться с помощью рис. 2.16, практически не отличается от V2 G -фильтра. Нам также очень повезло в том, что касается математических аспектов задачи, так как получение оценок для возможных расстояний между пересечениями нулевого уровня сигналов с ограниченными спектрами является делом очень трудным. Ряд математиков, начиная с Раиса [195], а позднее Лонге— Хиггинс [136] и Лидбеттер [130], уже занимались этими вопросами. Задача интересна как таковая, поскольку она возникает в связи с рядом физических явлений, часть которых относится к числу очень важных. Это эффекты броуновского шума, обусловленные случайными перемещениями электронов в электрических цепях (например, некоторые усилители включаются при переходе напряжения через нулевой уровень), а также распределение высоты морских волн, вызывающее сегодня особый интерес из-за того, что человек пытается приступить к использованию этого источника энергии. Кроме того, этот же математический аппарат применяется при изучении бликов на поверхности моря, т. е. тех его участков, от которых солнце отражается как бы прямо в глаза наблюдателю — в результате поверхность моря блестит и сверкает и создается впечатление, что она мерцает. Итак, существует возможность анализировать пространственные распределения пересечений нулевого уровня, по крайней мере для одномерных сигналов с ограниченным спектром. Результаты такого анализа представлены на рис. 3.17 для идеального однооктавного полосового фильтра (левый столбец) — этот пример был проиллюстрирован на рис. 2.19 и для У2£ -фильтра, обеспечивающего хорошую аппроксимацию тех фильтров, которые, по мнению Уилсона, действуют на этапах предварительной обработки изображений в зрительной системе человека (правый столбец) — этот случай проиллюстрирован на рис. 3.16. Необходимые подробности приведены в подписи к рис. 3.17, однако отметим, что особый интерес вызывают два графика, приведенные на рис. 3.17, е. Они указывают вероятность (для случая пересечения нулевого уровня в начале координат) наличия другого пересечения нулевого уровня того же знака на расстоянии if от начала координат. Масштаб по оси £ для случая, представляющего интерес с биологической точки зрения (справа), соответствует значению ширины рецептивного поля Wi _ D, равному 2, 8. Следует обратить вни- 149
мание на два значения этой вероятности: на расстоянии, равном значению w1_Ј), она составляет около 5 %, а на расстоянии, равном значению 2w1_Ј), она составляет около 50 % и ее значение резко возрастает. Умеренные изменения геометрии фильтра не вызывают существенных изменений значений этой вероятности. Алгоритм установления соответствий между изображениями стереопары. Опираясь на эти сведения, теперь можно предложить алгоритм установления 150 Рис. 3.17. Распределения интервалов разделяющих пересечения нулевого уровня. Фильтрация гауссовского случайного процесса осуществляется с помощью фильтра с определенной амплитудно-частотной характеристикой (а). Приближенные распределения интервалов для первого (Р0) и второго (Рц) пересечений нулевого уровня для гауссовс-ких процессов с нулевыми средними значениями на выходе фильтров (б). Когда пересечение нулевого уровня в начале координат соответствует переходу от отрицательной полуволны сигнала к положительной, вероятность наличия еще одного пересечения нулевого уровня того же знака на.расстоянии £ от начала координат приближенно определяется значением интеграла от функции распределения Ру (в). В левом столбце приведен график для идеального однооктавного фильтра с центральной частотой oj = 27t/\, в правом столбце аналогичный график приведен для рецептивного поля, рассматривавшегося в [256]. Соотношение пространственных постоянных возбуждения и торможения составляет 1: 1, 5. Ширина центральной возбуждающей зоны рецептивного поля w равна 2, 8 единиц, в которых градуирована ось £. Для случая, представленного в левом столбце, вероятность fPt = 0, 001 соответствует интервалу £ - 2, 3, а вероятность 0, 5 - интервалу % =6, 1. Эти значения для случая, представленного в правом столбце, составляют % = 1, 5 и £ - 5, 4. Если соотношение пространственных постоянных составляет 1: 1, 75, соответствующие значения вероятности fPx изменяются не более чем на 5 % [155] •< ----- соответствий между изображениями стереопары и доказать его корректность. Начнем с одного простого случая, когда ложные цели фактически не рассматриваются. Рисунок 3.18, а прекрасно иллюстрирует этот случай. Проверяется соответствие некоторого пересечения нулевого уровня левого изображения, обозначенное через L, пересечению нулевого уровня того же знака правого изображения, смещенного относительно первого на значение диспаратности d. Правильное соответствие обозначено через R, возможная ложная цель F, " притаившаяся" поблизости, изображена штриховой линией. Однако при условии, что рассматривается лишь диапазон значений диспаратности, равный w/2, мы свободны от риска встречи с ложной целью, так как даже если пересечение нулевого уровня R располагается точно на границе диапазона диспаратности (например, d =w/2), проведенный выше статистический анализ гарантирует, что с вероятностью 95 % в диапазоне значений диспаратности, покрывающем ширину w центральной возбуждающей части рецептивного поля, может встретиться лишь одно пересечение нулевого уровня того же знака. Даже если не принимать во внимание все те случаи, когда появляются два кандидата на соответствие, более чем в 95 % случаев нам будет сопутствовать успех. При этом, конечно, предполагается, что R — правильное соответствие, т. е. оно действительно принадлежит диапазону w/2, изучаемому алгоритмом. Можно, однако, указать, когда правильное соответствие не принадлежит этому диапазону, поскольку, если диспаратность наблюдаемой поверхности входит в этот диапазон, почти для всех пересечений нулевого уровня левого изображения на правом изображении найдутся соответствия и для всех пересечений нулевого уровня левого изображения на правом найдется по меньшей мере один кандидат на соответствие. Если же значение диспаратности такой поверхности выходит за пределы данного диапазона, то вероятность отыскания для некоторого пересечения нулевого уровня левого изображения кандидата на 151
Рис 3.18. Процесс установления соответствия, ориентированный на левое изображение. Устанавливается соответствие между некоторым пересечением нулевого уровня левого изображения L и пересечением нулевого уровня правого изображения R, смещенным относительно первого на значение диспаратности а. Вероятность появления какой-либо ложной цели относительно пересечения нулевого уровня w в диапазоне значений диспаратности протяженностью R мала, и, следовательно, прис? < w /2 (а) ложные цели будут почти всегда отсутствовать в диапазоне значений диспаратности про1яженностыо w/2 Отсюда следует первый из возможных алгоритмов установления соответствий. В противном случае можно рассмааривать все соответствия в диапазоне протяженностью w (б) При этом ложные цели, обозначенные на рисунке через F, могут возникать приблизительно в 50 % случаев, однако правильное решение также существует. Если правильное соответствие конвергентно, то ложная цель с высокой вероятностью дивергентна. Итак, при использовании второго алгоритма при однозначности соответствий (для обоих изображений) они принимаются как правильные, а остальные трактуются как неоднозначные и подчиняющиеся эффекту распространения (в). В данном случае можно установить соответствие между Z-, и Л, или/? 2 имежду! 2 и R 2. Поскольку оба соответствия имеют одинаковые значения диспаратности, соответствие устанавливается между L, Hi?, [155] соответствие на правом изображении в пределах указанного диапазона фактически эквивалентна вероятности случайного попадания некоторого пересечения нулевого уровня соответствующего знака правого изображения в определенный пространственный диапазон w /2. Значение этой вероятности составляет около 40 %. Следовательно, если диспаратность поверхности выходит за 152 пределы указанного диапазона, будет устанавливаться лишь около 40 % соответствий, против почти 100%-ного их установления в случае, когда поверхность попадает в соответствующий диапазон диспаратностей. Следовательно, нетрудно указать, когда процесс установления соответствии успешно завершится. Заметим, кстати, что мы опираемся на третье условие нашего основного допущения — непрерывность, поскольку предполагается, что имеется возможность просматривать некоторую окрестность изображения, размеры которой достаточны для эмпирической оценки различия, существующего между случаями 40 %-ной и, скажем, 95 %-ной вероятности установления соответствий. Такая окрестность не должна быть очень большой, но она должна существовать, и именно поэтому нам требуется допущение о непрерывности. Теперь, после того как с помощью этого простого алгоритма проиллюстрирована основная идея, можно приступить к его усовершенствованию, с тем чтобы расширить диапазон допустимых значений диспаратности от w /2 до w. На рис. 3.18, £ изображено уже упоминавшееся пересечение нулевого уровня левого изображения L, однако в данном случае его правильное соответствие на правом изображении R может иметь значение диспаратности d, достигающее значения w. Во-первых, следует отметить, что если диспарат-ность d принимает положительные значения, то на основании тех же, что и выше, доводов можно по меньшей мере с 95 %-ной вероятностью считать пересечение нулевого уровня R единственным кандидатом на соответствие в диапазоне значений диспаратности от 0 до w. Во-вторых, как показывает проведенный нами статистический анализ, вероятность появления ложной цели в диапазоне значений диспаратности, равном 2 w и включающем значения диспаратности от d = — w до d = w, составляет самое большее 50 %, даже в том случае, когда правильное соответствие находится на одном из концов этого диапазона. Рассматривая эти два обстоятельства в совокупности, мы приходим к выводу, что по меньшей мере в 50 % случаев установление соответствия приводит к получению однозначного и правильного результата, а остальные случаи оказываются неоднозначными и требуют рассмотрения главным образом двух альтернатив — одной конвергентной (в диапазоне (0, w)) и одной дивергентной (в диапазоне (—w, 0)), причем одна из них дает правильное соответствие. Выбор правильной альтернативы в случае неоднозначности может основываться просто на учете знаков соседних соответствий (обратите внимание на использование условия непрерывности). Отметим, кстати, что при проверке соответствия в малой окрестности нулевого значения диспаратности вероятно (р > 0, 9) наличие лишь единственного кандидата, что снова следует из статистического анализа. Следовательно, представление о трех диапазонах значений диспаратности — конвергентном, дивергентном и расположенном в окрестности нулевого значения - естественно вытекает из данного метода установления соответствий между изображениями стереопары. Итак, если диспаратность поверхности принадлежит указанному диапазону, почти для 100 % пересечений нулевого уровня будут найдены соответствия; в противном случае эта доля составляет 70 % (вместо 40%, о которых речь шла выше), но она все еще достаточно сильно отличается от 100 %, что 153 позволяет нам указывать, когда процесс установления соответствий успешно завершается. Добиться существенного расширения допустимого диапазона значений диспаратности w, не прибегая к более мощным методам удаления ложных целей, не удается, поскольку вероятность появления ложных целей довольно резко увеличивается при выходе за пределы диапазона 2w. Например, при сокращении последнего до 1, 5 w доля неоднозначных соответствий падает уже до 20%. Единственность, кооперативностъ и эффект распространения. Э. Гримсон [71] отметил существенную особенность процесса установления соответствия: он может реализовываться при использовании только одного из изображений стереопары либо для обоих изображений одновременно. Так, например, если в случае, представленном на рис. 3.18, в, ориентировать процесс установления соответствий на левое изображение, соответствие для пересечения нулевого уровня L х неоднозначно, а для пересечения нулевого уровня L 1 — единственно. При ориентации процесса установления соответствий на-правое изображение единственно соответствие для пересечения нулевого уровня R \, но неоднозначно — для R 2. Два однозначных соответствия, взятые вместе, составляют правильное решение. Истинность единственных соответствий, а не неоднозначных следует из условия, единственности, включенного в основное допущение стерео пейса..Поэтому алгоритм установления соответствий можно организовать таким образом, чтобы он находил и " принимал" однозначные соответствия, ориентируясь на каждое из изображений стереопары. Такая конструкция алгоритма, однако, имеет в действительности ряд примечательных следствий, поскольку означает, что условие единственности больше не является проверяемым по определению в алгоритме, в то время как условие непрерывности таковым остается. Это обстоятельство устанавливается следующим образом. Как мы уже убедились, данный алгоритм предусматривает определение части локальных кандидатов на соответствия, для которых оно фиксируется с тем, чтобы выяснить, принадлежит ли диспаратность наблюдаемой поверхности рассматриваемому диапазону значений диспаратности. Если эта часть близка к 100 % — то все в порядке. Если же нет (в этом случае она, по всей вероятности, составляет 70 %). — полученное решение отвергается. " Обмануть" этот тест очень трудно, и, поскольку его обоснование базируется на условии непрерывности, он эквивалентен проверке по определению в алгоритме локального выполнения условия непрерывности на видимых поверхностях. Иначе обстоят дела с единственностью. Если алгоритм выбирает решения, ориентируясь на их единственность относительно одного из изображений, то это позволяет с его помощью добиваться слияния конфигураций типа граничного случая Панума (рис. 3.19) не только для изображений с малым числом " событий" (типа представленного на рис. 3.19, а), но и для изображений с высокой плотностью заполнения. Для изучения этой проблемы О. Браддик предложил использовать стереограммы, подобные приведенным на рис. 3.19, б: в таких стереограммах каждой точке правого изображения соответствуют 154
Рис. 3.19. Граничная конфигурация, предложенная Панумом. При слиянии возникает впечатление двух прямых, разнесенных по глубине (а). Каждой точке правого изображения ставятся в соответствие две точки левого изображения. При слиянии наблюдатель воспринимает две плоскости. Парные точки не обязательно должны присутствовать лишь на одном из изображений (б). Результаты применения стереоалгоритма к стерео-граммам на рис. 3.19, б; значения диспаратности представлены таким же образом, как это было сделано на рис. 3.13. На рисунке можно обнаружить две плоскости (в) две точки левого. Соответствие, ориентированное на левое изображение, однозначно, поэтому оно принимается, в результате чего возникает перцептивный образ, состоящий из двух плоскостей, которые располагаются одна позади другой. Зрительная система не обладаег специфичностью относительно использования правого или левого глаза, и поэтому может случиться, что 155 часгь парных объектов окажется на правом изображении, а часть — на левом. Для зрительной системы это безразлично. По существу, такая ситуация, конечно, невозможна в случае двух реальных поверхностей, и именно поэтому, возможно, мы не предусмотрели в алгоритме внутренней проверки условия единственности. Тем не менее в этой связи возникает одно интересное положение общего характера: некоторые допущения пригодны для внутренней проверки в алгоритме, и такая проверка проводится, некоторые допущения могли бы проверяться таким образом, но не проверяются, например условие единственности; некоторые же допущения вообще невозможно проверить. Ниже мы встретим несколько соответствующих примеров, но сейчас стоит, возможно, отметить, что одним из них может служить иллюзия искаженной комнаты, предложенная Эймсом. В этом случае допущение о том, что углы — прямые, не поддается внутренней проверке без привлечения стереопсиса или какой-либо информации о движении. И наконец, существуют ситуации, когда соответствие неоднозначно для обоих глаз. При этом неоднозначность можно устранить с помощью информации о знаках соседних соответствий — выбираются соответствия с одинаковыми знаками. Имеется, однако, существенное различие между двумя наиболее очевидными способами осуществления такого выбора. Можно ориентироваться на знаки тех соседних соответствий, которые являлись однозначными с самого начала, но можно и пользоваться знаками тех соседних соответствий, которые к этому моменту установлены. Вторая схема вносит в процедуру механизм кооперации, первая же — нет. Для того чтобы удостовериться в этом, представим себе стереограмму, синтезированную столь искусно, что все соответствия неоднозначны, за исключением одной области однозначности, расположенной, скажем, на границе. С помощью первой схемы невозможно устранить неоднозначность ни для одного соответствия, относящегося к внугренней части стереограммы, поскольку отсутствует хотя бы одно однозначное соответствие, с которого можно было бы начать. В случае же применения второй схемы процесс снятия неоднозначности будет постепенно распространяться от границ стерео-граммы, на которых соответствия уже установлены, во внутреннюю часть, в которой в конечном счете будут установлены те соответствия, знаки которых совпадают со знаками соответствий на границах. Джулес и Чан [115] поставили такой эксперимент. На рис 3.20 приведен пример типа стереограммы, использовавшегося ими. Оказалось, что информация, заключенная в граничной области, может тем или иным способом направлять процесс установления соответствий, обеспечивая его продолжение во внутренние области стереограммы. Из этого следует, что в зрительной системе человека используется вторая из двух указанных выше возможностей Фузионная зона Панума. Использование второй из описанных выше схем позволяет установить правильные соответствия при диспаратностях, укладывающихся в диапазон, равный w Точносгь определения значений диспаратности в этом случае должна быть весьма высокой и составляет некоторую приблизительно постоянную долю значения w 156
Рис 3 20 Существует много способов установления соответствий в центральной части данной стереограммы, однако обычно воспринимаются лишь те соответствия, диспарат-ности которых минимальны Тем не менее некоторое определенное установленное соответствие можно сместить, введя в стереограмму допускающие однозначное установление соответствия точки, обладающие некоторой фиксированной диспаратностью (а) Шесть процентов точек, расположенных в верхней половине квадрата, имеют однозначные соответствия, характеризующиеся перекрестной диспаратностью в две точки (смещение в направлении носа), в нижней же половине квадрата смещение определяется неперекрестной диспаратностью в две точки Даже при введении смещения на границе обеспечивается возникновение одного из допустимых вариантов слияния в центре (б) Это свидетельствует о том, что алгоритм установления соответствия между изображениями стереопары, действующий в зрительной системе человека, в определенной мере использует кооперативный механизм [115] (результаты, относящиеся к остроте стереозрения, позволяют оценить ее приблизительно как н> /20) Применительно к каналам центральной ямки сетчатки, постулированным в модели Уилсона, это соответствует диспаратности, равной 3', и разрешению, равному 10, для канала с минимальным рецептивным полем и, быгь может, диспаратности, дохо- 157 дящей до 20' и разрешению, равному 1, для канала с наибольшим рецептивным полем. При эксцентриситете 4° этот диапазон составляет от 5, 3'до приблизительно 34'. При этих допущениях прогнозируемые значения хорошо согласуются с известными результатами измерений порогов слияния, происходящего без использования движений глаз. Митчелл [169], использовав кратковременную экспозицию раздражителей - коротких отрезков прямых, обнаружил, в полном соответствии с результатами предыдущих исследований, что максимальные значения конвергентной и дивергентной диспарат-ностей при отсутствии диплопии составляют 10-14'в центральной ямке сетчатки и около 30 - при эксцентриситете в 5°. Таким образом, протяженность так называемой фузионной зоны Панума оказывается вдвое больше этих максимальных значений диспарат-ности. Применив в эксперименте стабилизацию сетчаточного изображения, Фендер и Джулес [47] установили, что слияние двух раздражителей-прямых (ширина линии 13', высота 1°) происходит при максимальной диспаратноети в 40'. Это значение, вероятно, характеризует полную протяженность фузионной зоны Панума. Воспользовавшись все той же стереограммой, образованной случайными конфигурациями точек, Фендер и Джулес получили значение 14 (6 - смещение и 8'- диспаратность в пределах стереограммы). Поскольку размер точки составлял всего лишь 2?, можно предполагать, что на высокочастотные каналы приходится больше энергии, чем на низкочастотные, и, следовательно, нужно ожидать соответственного сужения зоны слияния. Джулес и Чан [115], используя точки размером б'при угле наблюдения 5°, без каких-либо затруднений довели значение диспаратноети, при которой происходит слияние, до 18'. Принимая во внимание все факторы, можно считать, что эти данные, по-видимому, соответствуют нашим ожиданиям. Важнейший прогноз, который получен с помощью этой теории, состоит в том, что максимальная диспаратность, при которой слияние еще возможно, должна быть (в определенном смысле) соизмерима с пространственной частотой раздражителя, поскольку нижние пространственные частоты выделяются только с помощью каналов с большими рецептивными полями. Сейчас мы уже располагаем некоторыми свидетельствами о том, что это, возможно, действительно так [46]. Восприятие глубины при больших значениях диспаратноети. Мы предполагаем, что зона Панума соответствует процессу слияния изображений стереопары в чистом виде. За пределами диапазона значений диспаратноети некоторая возможность восприятия глубины все еще сохраняется, хотя это восприятие не соответствует точно истинному значению диспаратноети. В этой связи целесообразно рассмотреть два следующих интересных случая. Первым из них является диплопия, при которой человек видит двойное изображение, но в то же время все еще воспринимает глубину. Алгоритмы установления соответствий между изображениями стереопары, описанные нами выше, предназначены для работы со сложными изображениями. Если изображения отличаются очень малой плотностью заполнения, при установлении соответствий между ними не возникает каких-либо проблем, так как в этом случае нет ложных целей, от которых приходится избавляться. Если, например, в заданном диапазоне значений диспаратноети w вообще не находится допустимых соответствий, можно обратиться за соответствующей информацией к детекторам, действующим вне этого диапазона и, возможно, обеспечивающим обнаружение соответствий в более широком диапазоне. Идея здесь состоит в том, что при наличии определенных сведений о знаке диспаратноети их может оказаться достаточно для " включения" вергентных движений глаз в необходимом направлении, с тем чтобы изображения были введены в пределы того диапазона значений диспаратноети, в котором возможно достижение слияния. 158
Рис. 3.21. Кроме трех групп детекторов, действующих в малых диапазонах значений дис-паратности (их характеристики представлены сплошными линиями), могут существовать группы детекторов диспаратности, действующие за пределами основного диапазона (их характеристики представлены штриховыми линиями). Задача последних состоит в установлении того, дивергентно или конвергентно расположена плоскость слиятия, чтобы в соответствующем направлении начались вергентные движения глаз Существует и другой способ использования таких детекторов. Как мы убедились, в разделе, посвященном информационной теории стереопсиса, если плотность заполнения изображения объектами, пригодными для установления соответствия, составляет и, то плотность соответствий при правильном значении диспаратности равна и, а при неправильных значениях диспаратности - всего лишь и2. Если имеется некоторый набор детекторов диспаратности и нас интересует исключительно знак диспаратности, при которой соответствия устанавливаются правильно, можно воспользоваться вычислительной схемой, предусматривающей суммирование общего числа конвергентных соответствий (ложных целей и т. д.) и сопоставление результатов суммирования с соответствующим числом дивергентных соответствий. Можно рассмотреть различные способы реализации такой процедуры. Так, скажем, в самом простом варианте суммирование могло бы осуществляться одновременно по всему диапазону конвергентных и по всему диапазону дивергентных диспаратностей, однако вполне возвожно и постепенное расширение области суммирования, до тех пор пока не будет получена существенная разность. Во всяком случае, при любой биологически достоверной реализации типа той, что проиллюстрирована рис. 3.21, следует ожидать уменьшения числа детекторов при увеличении значений диспаратности. Статистический анализ указывает, что в этом случае будет обеспечена психофизическая зависимость между диспаратностью стереограммы при отсутствии слияния и областью, необходимой для определения знака диспаратности. Интересно, что Тайлер и Джулес [232] установили наличие подобной связи для случая динамических стереограмм, образованных случайными конфигурациями точек. В стереограммах такого типа конфигурации (но необязательно их диспаратности) изменяются со скоростью порядка 30 кадров в секунду. Знак диспаратности поддается определению (но не очертания диспаратного образа, например) при значениях диспаратности, доходящих до нескольких угловых градусов. Полученный ими результат - пропорциональность возможности определения знака диспаратности значению квадратного корня из размера области {\ J ~ A ) — можно объяснить с помощью схемы типа той, которая была предложена нами: в ней плотность детекторов диспаратности уменьшалась обратно пропорционально росту значений диспаратности, т. е. имела место зависимость 1/d. В результате возникает \/~/Г-зависимость [155 J. Конечно, этим результатам можно придать и иное толкование исходя из таких факторов, как движение либо возможное нелинейное покадровое суммирование во времени, осуществляемое на рецепторном уровне. И наконец, вернемся к проблеме, которая все еще кажется мне загадкой стереопсиса, а именно: почему в качестве исходного представления для процесса установления соответствий между изображениями стереопары следует использовать пересечения нулево- 159
Рис 3 22 Текстурные различия, ясно различимые монокулярно, исчезают го уровня9 Почему не подождать и не воспользоваться необработанным и полным первоначальными эскизами, применив схему с теми же общими характеристиками, но предусматривающую замену пересечений нулевого уровня, относящихся к низким пространственным частотам, приближенными крупномасштабными непроизводными элементами первоначального эскиза и пересечений нулевого уровня, относящихся к высоким частотам, необработанным первоначальным эскизом Набпюдения Джулеса и Миллера [116], например, связанные с независимостью слияния по различным пространственным частотам, служат как будто бы наилучшим свидетельством в пользу варианта с одними пересечениями нулевого уровня, но, возможно, они поддаются объяснению и с помощью нашей альтернативной схемы Дело в том, чу>, поскольку в стереограммах, использованных Джулесом и Миллером (см рис 3 10), информация, которая относится к различным частям спектра пространственных частот, поступает не из одного источника, допущение о совпадении в пространстве нарушается и, следовательно, в первоначальном эс кизе каждой пространственной частоте будут соответствовать независимые описания 160
при возникновении стереоскопического слияния двух изображений [52] Кроме того, мы располагаем данными Кидда, Фрисби и Мейхью 1120] (они излагались в гл 2), которые указывают на то, что некоторые виды границ на текстурах могут вызывать при стереопсисе вергентные движения глаз Это служит явным свидетельством использования в стереозрении некоторых описаний, входящих в первоначальные эскизы на более поздних этапах обработки зрительной информации. С другой стороны, однако, эта же группа исследователей обнаружила, что стереоскопическое слияние может, в некотором смысле, преобладать в зрительном распознавании текстур и тем самым, возможно, служит его предпосылкой (Фрисби и Мейхью [52 рис 1, Ь, с и d ]) Несколько соответствующих примеров приведено на рис 3 22 При монокулярном рассматривании этих изображений на них ясно различаются области, тексту-рированные по разному, однако при бинокулярном рассматривании они сливаются. Этот факт является определенным, но отнюдь не бесспорным свидетельством в пользу подхода, предусматривающего использование пересечений нулевого уровня Моя точка зрения состоит в том, что на самом деле применяется некоторая комбина- 161 ция обоих методов, хотя в основе лежит метод, связанный с пересечениями нулевого уровня. Важнейшими преимуществами использования последних, очевидно, являются быстродействие (поскольку они определяются в первую очередь) и точность (поскольку их местоположение может определяться очень точно). Теоретические оговорки относительно пересечений нулевого уровня, сводящиеся к тому, что они лишь приближенно и ненадежно связаны с изменениями в реальном мире, не очень серьезны, поскольку пересечения нулевого уровня вполне физические (даже более, например, чем уровни серого тона). И это действительно так, поскольку реализация на ЭВМ теоретических положений, относящихся к пересечениям нулевого уровня, дала прекрасные результаты при работе с естественными изображениями [73, 71]. Решили ли мы именно ту задачу, которую следовало решить7 Основной проблемой, с которой сталкивается разработчик алгоритмов установления соответствий между изображениями стереопары, является определение того, какие задачи трудные и какие -нет. Нейрофизиолог мог бы с определенным основанием возразить, что проблема слияния изображений стереопары, в сущности, вовсе не так уж сложна, а действительно замечательным свойством стереозрения человека является его точность, которая может достигать столь высоких значений, как 2 при 75 %-ной норме успешного результата; это значение точности соответствует приблизительно 1/12 диаметра колбочки центральной ямки сетчатки (16). Он же мог бы отметить, что проблема ложных целей не является трудной, если соответствие устанавливается по признакам специального вида, которые встречаются на изображении весьма редко. Я с этими аргументами не согласен в силу следующих причин. При установлении соответствий между изображениями стереопары решающее значение, несомненно, приобретает вопрос о том, насколько редко это редкое и каким образом редкость признака связана с рассматриваемым диапазоном значений диспаратности. Психофизические данные свидетельствуют о том, что те признаки, которые могут использоваться для установления соответствий, относятся к нижнему уровню и не отличаются какими-либо специфическими особенностями, связанными с контрастом или ориентацией. Так, стерео-граммы, образованные случайными конфигурациями точек, должны содержать ложные цели, тем не менее нам удается добиваться их слияния. Теоретический анализ, положенный в основу нашего второго алгоритма, в сущности, посвящен главным образом именно вопросу о том, насколько редко редкое, который самым тесным образом связан с допущением, что исходным представлением для процесса стереоскопического слияния изображений стереопары служат приближенно-ориентированные пересечения нулевого уровня, характеризующиеся определенным знаком. Острота стереозрения, с другой стороны, хотя и представляет собой феномен весьма примечательный, но порождает проблемы технические, а не теоретические. Они относятся к третьему из введенных нами уровней, а именно к уровню механизмов реализации, поскольку в связи с остротой стереозрения возникает лишь один вопрос: сколь точно устанавливается местоположение пересечений нулевого уровня? То обстоятельство, что они могут быть локализованы с точностью до 2°, производит сильное впечатление, однако это без труда можно воспроизвести, например, в программе вычислительной машины. Необходимо просто достаточно точно определить те точки, в которых график свертки V2 G пересекает нулевой уровень. Никаких принципиальных проблем при этом не возникает. Поразительно, что такие вычисления могут осуществляться на нейронном уровне, и, вероятно, это означает, что на каком-то этапе очень большое число маленьких клеток используется для обнаружения и локализации этих местоположений, однако процедуры не порождают теоретических проблем в юм смысле, в котором их порождает стереоскопическое слияние изображений стереопары Мы еще вернемся к проблеме остроты стереозрения в разделе, посвященном реализации на нейронном уровне. 162 Вергентные движения глаз и 2, 5-мерный эскиз. Согласно методам, положенным в основу второго алгоритма установления соответствий между изображениями стереопары, после того, как с помощью изучения локальных окрестностей (некоторой заданной мощности) изображений, обработанных v2 G-фильтрами, определены на них соответствия, последние помещаются во временное буферное запоминающее устройство. Эти соответствия используются также для управления движениями обоих глаз, что на основе информации, полученной на больших локальных окрестностях, дает возможность перемещать малые локальные окрестности в их области соответствия. Управление вер-гентными движениями глаз может осуществляться непосредственно собственно нейронами, функцией которых является установление соответствия либо косвенно с помощью буферного запоминающего устройства, либо (что наиболее вероятно) обоими способами. Причины, позволяющие постулировать наличие памяти, можно разделить на две категории: те, которые вытекают из общего анализа предварительной обработки информации в зрительной системе, и те, которые специфически связаны с проблемой стереопси-са. Наличие какой-либо памяти, в которой может храниться нечто типа 2, 5-мерного эскиза (см. рис. 3.12), целесообразно согласно общим положениям информационной теории зрения, поскольку она дает представление, объединяющее информацию, полученную при реализации ряда процессов предварительной обработки информации в зрительной системе (см. гл. 4). Причиной, непосредственно связанной со стереопсисом, является простота информационных процессов, обеспечивающих установление соответствий; в этом случае для хранения результатов процесса установления соответствий при изменении плоскости фиксации вследствие дизъюнктивных движений глаз и перемещении объектов в поле зрения требуется буферное запоминающее устройство. Таким образом, 2, 5-мерный эскиз — это то, где в действительности происходит глобальный стереопсис: объединяются соответствия, полученные независимо по различным каналам, формируется итоговая карта значений диспаратности, которая доступна для использования другими зрительными процессами, и создается представление, составляющее основу нашего индивидуального восприятия стереограмм, воспроизводящих геометрию видимых поверхностей. Подробное обсуждение 2, 5-мерного эскиза будет приведено в следующей главе. Сейчас же мы сделаем несколько кратких замечаний относительно управления движениями глаз в стереозрении. Дизъюнктивные движения глаз, изменяющие плоскость фиксации обоих глаз, не зависят от конъюнктивных движений глаз (Рашбасс и Уэстхаймер [191 ]) и являются, скорее, плавными, чем саккадическими. Их постоянная времени равна приблизительно 160 мс, а используемая для управления ими стратегия достаточно проста. Скорость (асимптотическая) вергентных движений глаз линейно зависит от амплитуды диспаратности, причем коэффициент пропорциональности составляет около 8 град/с на градус диспаратности Ц90]. Точность вергентных движений глаз доходит до 2'[201], и при произвольных бинокулярных саккадах значения конвергенционного угла почти не изменяются [253]. Более того, Уэстхаймер и Митчелл [251] обнаружили, что тахистоскопическое предъявление диспаратных изображений вызывает соответствующие вергентные движения глаз, но не обеспечивает их завершения. Эти данные служат сильным аргументом в пользу того, что вергентные движения глаз осуществляются, скорее, в режиме непрерывного управления, чем баллистически. Гипотеза заключается в том, что для управления вергентными движениями глаз используется информация о соответствиях, определяемых при использовании нескольких различных каналов с помощью описанных выше механизмов, обеспечивающих возможность приближенного восприятия глубины, и с помощью каких-то представлений гра- 163
Рис. 3.23. Две стереограммы, имеющие одинаковые диапазоны изменения диспаратное™: а — значения диспаратности изменяются непрерывно; б — присутствуют две диспаратные плоскости. Восприятие второй стереограммы требует большего времени, в первую очередь, вероятно, потому, что система управления вергентными движениями глаз располагает в этом случае меньшей информацией о том, каким образом следует просматривать диапазон изменения диспаратности ниц, относящихся к более высоким уровням и участвующих в процессе непосредственно или опосредованно через 2, 5-мерный эскиз. Эта гипотеза не противоречит экспериментальным данным, относящимся к стратегии и точности управления вергентными движениями глаз, и учитывает, кроме того, данные о том, что время восприятия в определенной степени зависит от распределения диспаратности на сцене [51, 209]. Восприятие стереограммы винтовой лестницы, поднимающейся к наблюдателю, не занимает много времени, как это происходит в случае стереограммы, представляющей две плоскости и характеризующейся тем же диапазоном изменения диспаратности, что и первая стерео-грамма. Исходя из нашей теории именно этого и следовало ожидать, поскольку при вос- 164 приятии сцен типа винтовой лестницы, в которых значения диспаратности претерпевают гладкие изменения, имеется возможность с помощью вергентных движений глаз просматривать большие диапазоны изменения диспаратности в режиме непрерывного управления на основе выходных значений, получаемых на локальных окрестностях даже минимальной мощности. С другой стороны, стереограммы, образованные двумя плоскостями с тем же диапазоном значений диспаратности, требуют большого вергентного смещения, но не позволяют получать точную информацию, необходимую для осуществления непрерывного управления вергентными движениями глаз. Следовательно, большое время, затрачиваемое на восприятие таких стереограмм, можно объяснить исходя из стратегии случайного поиска, используемой в системе управления вергентными движениями глаз. Другими словами, управление вергентными движениями глаз представляет собой некоторый простой непрерывный процесс с обратной связью, доступ к которому с верхних уровней обработки информации в зрительной системе обычно невозможен. Стереограммы, приведенные на рис. 3.23, дают возможность читателю убедиться в том, что это, по крайней мере субъективно, действительно так. Интересно отметить, что имеются данные, свидетельствующие о возможности научить наблюдателя совершать эффективные последовательности вергентных движений глаз [51]. Однако этот эффект обучения связан с такой же информацией, которая используется в замкнутой системе управления вергентными движениями глаз. Априорная, вербальная и относящаяся-к высшим уровням информация о стереограммах оказывается неэффективной, как, кстати очевидно, она оказывается неэффективной на всех уровнях обработки, вплоть до 2, 5-мерного эскиза включительно. Реализация процесса слияния изображений стереопары на нейронном уровне Реализация только что описанного второго алгоритма установления соответствий между изображениями стереопары на нейронном уровне еще не определена полностью. Одна из причин такого положения заключается в том, что затраты труда, необходимые для получения полного искомого описания, нельзя считать оправданными до тех пор, пока данные нейрофизиологических и психофизических исследований не дадут достаточно надежных подтверждений того, что данный алгоритм работает и вообще является правильным. Первые шаги в направлении анализа возможных нейронных механизмов, обеспечивающих реализацию У2С-фильтра и определение пересечений нулевого уровня, тем не менее были сделаны [150, 158]. Проблема бинокулярного объединения все еще остается открытой и является первой из тех, которые мы сможем сформулировать. Однако позволим себе сделать в этой связи несколько предварительных замечаний Во-первых, чувствительность к диспаратности не должна возникать прежде, чем будут обнаружены пересечения нулевого уровня. Поэтому если простые клетки поля 17 (зрительной коры), являющиеся первичными кортикальными клетками зрительного пути, чувствительны к диспаратности, как, по-видимому, имеет место у кошек {12], то они должны также обнаруживать пересечения нулевого уровня. Достигаться это может различными способами, и на рис. 3.24 приведены два примера. В первом предполагается, что пересечения нулевого уровня определяются двумя ден-дритами независимо, в основном в соответствии со схемой, представленной на рис. 2.18, и на основе локальных синаптических механизмов типа рассмотренного Поджо и Торри [185]. У этого механизма есть недостатки. Во-первых, он обладает не очень высокой чувствительностью к диспаратности, поскольку в каждом из глаз пересечения нулевого уров- 165
ня определяются с точностью, в небольшой степени превышающей ширину центральной части рецептивного поля w> ljD. Во-вторых, диапазон изменения диспаратности, на который в данном механизме обеспечивается реакция, зависит от точного положения пересечения нулевого уровня в левом глазе, так как диапазон их положений в правом глазе также фиксирован конкретной геометрией схемы его связей. 166 Рис. 3.24. /Два возможных варианта реализации детекторов диспаратности на нейронном уровне. В первом варианте (а) нервная клетка отыскивает пересечения нулевого уровня определенного знака, используя два дендрита, каждый из которых получает информацию от своего глаза и действует независимо от другого. Результаты от каждого из денд-ритов поступают на вход логического элемента И. Таким образом, нервная клетка разряжается каждый раз, когда пересечения нулевого уровня с соответствующими знаками одновременно появляются в рецептивных полях клетки, связанных с левым и правым глазами соответственно (б). Подобная схема, однако, в состоянии обеспечить лишь довольно грубое определение значений диспаратности; к ее недостаткам, скажем, относится то, что диапазон изменения диспаратности, в котором эта схема работоспособна, варьируется в зависимости от положения пересечения нулевого уровня в рецептивном поле левого глаза. На рисунке окружности представляют возбуждающие входы, квадратики — тормозные. Незачерненные окружности и квадратики — синапсы — представляют входы, на которые поступает информация о появлении светлого раздражителя в центре рецептивного поля, зачерненные окружности и квадратики - входы, на которые поступает информация о появлении темного раздражителя в центре рецептивного поля. Символы L ик обозначают входы, на которые поступает информация от левого и правого глаз соответственно. Вторая схема свободна от указанного недостатка, поскольку она сообщает точные данные о знаке диспаратности, но работает эта схема лишь в небольшом диапазоне изменения диспаратности. Пересечение нулевого уровня отыскивается на левом изображении с помощью дендрита И нервной клетки (в), а знак диспаратности определяется по знаку разности в точке пересечения нулевого уровня (вычисляемого с по мощью некоторого линейного процесса) значений V 2 G-свертки для левого и правого глаз. Таким образом, эта схема представляет собой детектор знака диспаратности, не зависящий от положения пересечения нулевого уровня на изображении левого глаза, по меньшей мере в некотором небольшом диапазоне (г). При положительной указанной разности в точке пересечения нулевого уровня диспаратность имеет знак одной полярности (д), а при отрица-•^----- тельной - противоположной (е) Второй пример, приведенный на рис. 3.24, представляет другой механизм. Поскольку нервная клетка управляется пересечениями нулевого уровня, поступающими от левого глаза, она является лево до минируемой. Однако разряд ее определяется разностью значений свертки для левого и правого глаз в точке пересечения нулевого уровня. Если эта разность отрицательна, диспаратность обычно будет иметь один знак, если же она положительна, диспаратность обычно будет иметь противоположный знак, как это иллюстрируется рис. 3.24. Для некоторого яркостного перехода, представляющего при движении в зрительном поле слева направо переход от светлого к темному, наличие отрицательной разности соответствует дивергентным (малая удаленность) диспаратностям. Этот второй механизм в некоторой степени устраняет неточность, свойственную первому, поскольку предусматривает непосредственное определение того, располагается ли пересечение нулевого уровня в правом глазу (его знак фиксирован), слева или справа от пересечения нулевого уровня в левом глазу. Этот механизм также имеет недостатки, однако он может оказаться ненадежным из-за слишком тесного расположения пересечений нулевого уровня или очень сильного различия контрастов в левом и правом глазах. К сожалению, технические проблемы, связанные с нейрофизиологическими аспектами стереопсиса, существенны и объем количественных данных, которым мы располагаем сегодня, явно слишком незначителен, для того чтобы мы могли позволить себе отвергнуть любой из приведенных на рис. 3.24 механизмов либо оба. Со времени появления исходной работы Барлоу, Блейкмора и Петтигру [12], посвященной этой проблеме, было опубликовано сравнительно немного кривых, характеризующих чувствительность к диспаратности. Сравнительно недавно, однако, Поджо и Фискер [183] и фон дер Хейдт 167 с соавторами (239] опубликовали такие должным образом проверенные кривые для обезьяны и кошки соответственно. Эти работы в целом подтверждают представление о том, что нервные клетки-детекторы диспаратности объединены в три группы, ориентированные на конвергентную, близкую к нулю и дивергентную диспаратности, причем недавно Кларк, Доналдсон и Уиттеридж [35] обнаружили, что у овцы эти детекторы организованы в колонки, подобные тем, которые согласно гипотезе Хьюбела и Уисела должны существовать в поле 18 коры головного мозга макаки. Значения диспаратностей, правда, поразительно велики: 7° у овцы и до одного или даже нескольких угловых градусов у обезьяны. До сих пор еше не ясна конкретная роль этих детекторов в стерео-псисе. Довольно любопытно, что даже сова, пути биологической эволюции которой разошлись с путями обезьяны, возможно, раньше, чем возник стереопсис, как будто бы использует алгоритм, аналогичный алгоритму обезьяны. Петтигру и Кониси [182] установили, что, несмотря на абсолютное отсутствие сходства анатомической организации аналога зрительной коры, имеющейся у совы1, и зрительного пути обезьяны, физиологические характеристики их нервных клеток очень сходны. Однако сова не в состоянии очень много двигать глазами, и поэтому может сначала возникнуть впечатление, что она лишена возможности совершать вергентные движения глаз, столь существенные для излагаемого подхода к стереопсису. Природа тем не менее нашла выход: гороптер совы имеет наклон - он проходит через ее ноги в нижней части поля зрения и простирается вперед в бесконечность. Сова, таким образом, с помощью легких и неторопливых наклонов головы может добиться того же эффекта, который дают вергентные движения глаз, создав одновременно впечатление глубокой и сдержанной мудрости. И наконец, существует проблема остроты стереозрения. Последняя, подобно всем остальным способностям человека к повышенной остроте восприятия, обеспечивается специальным механизмом, который позволяет выделять на изображении малые изолированные признаки с разрешением в среднем порядка 5" [250]. Крик, Марр и Поджо [38] рассмотрели нейрофизиологические аспекты этой проблемы и высказали предположение о том, что один из возможных вариантов реализации соответствуюшего механизма может основываться на восстановлении с высоким разрешением изображения, подвергнутого V2 (7-фильтрации, после того как оно оказывается в зрительной коре в результате воздействия излучения в оптическом диапазоне. Барлоу высказал это предположение первым [11], а мы немного усовершенствовали его, указав, что восстановление не обязательно должно быть абсолютно точным. Вполне достаточно обеспечить при восстановлении участков сигнала, расположенных в окрестностях пересечений нулевого уровня, должную точность. Естественным кандидатом на роль " восстановителя" изображения является популяция нервных клеток-зерен слоя IYC/3 поля 17. Верхняя оценка указывает, что для каждого типа клетки (КСЦР и КТЦР) и для каждого глаза требуется не более одной нервной клетки-зерна на каждые 5 'канала с наименьшим рецептивным полем. Кроме того, Д. Хьюбел отмечает, что все эти клетки обладают пространственной организацией типа " возбуждающий центр - тормозящая периферия", что делает их неотделимыми от волокон коленчатого тела; взаимное расположение этих клеток к тому же отличается очень точным ретинотопическим характером - соседние нервные клетки соответствуют соседним точкам сетчатки. Очевидно, что клетки, участвующие в процессе восстановления, должны обладать всеми этими свойствами Было бы, следовательно, чрезвычайно интересно выяснить, отличаются ли их ответы в физиологическом отношении, скажем, по пространственным или особенно временным характеристикам. 1 В оригинале используется термин wulst — Прим. перев. 168 |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 138; Нарушение авторского права страницы





 . обозначает состояние ячейки сети, представленной на рис. 3.6. а (состояние
. обозначает состояние ячейки сети, представленной на рис. 3.6. а (состояние