|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Система координат трехмерной модели
Известны две разновидности систем координат, привязанных к объекту, которые могли бы использоваться в трехмерной модели. В первой из них все оси компонент, входящие в описание (от туловища до ресницы), задаются в одной и той же системе координат, основу которой составляет ось формы объекта в целом. Во второй используется " распределенная" система ко-312 ординат, т. е. каждая трехмерная модель снабжается собственной системой координат. Последний вариант предпочтительнее в основном по следующим двум причинам. Во-первых, пространственные отношения, определенные в описании трехмерной модели, всегда оказываются локальными относительно одной из входящих в это описание моделей и должны задаваться в системе координат, привязанной именно к этой модели, в силу тех же самых причин, по которым мы считаем систему координат объекта предпочтительнее системы координат наблюдателя. В противном случае информация о взаимном расположении компонентов какой-либо модели оказалась бы зависящей от ориентации оси этой модели относительно формы объекта в целом. Так, в частности, описание формы ноги лошади зависит от угла, составляемого ногой с ее туловищем. Во-вторых, помимо этих соображений, касающихся устойчивости и однозначности, доступность, удобство получения и использования представления, а также его модульная организация улучшаются, если каждая трехмерная модель располагает собственной системой координат, поскольку в этом случае ее можнр рассматривать как абсолютно независимый элемент описания формы объекта. Система координат для задания взаимного расположения осей компонентов трехмерной модели может быть определена либо с помощью оси модели, либо с помощью одной из осей компонентов. Ось, выбранную для задания этой системы координат, мы будем называть главной осью модели. Применительно к приводимым здесь примерам главной осью служит ось компонента, пересекающаяся наибольшим числом других осей компонентов данной трехмерной модели (или проходящая поблизости от них), например туловище животного на его общем виде. Кроме того, необходимо определить положе-
Рис. 5.4. Расположение осей трехмерной модели в пространстве находится с помощью соотношений, определяемых на парах этих осей и называемых отношениями присоединения. Пространственное расположение одной оси S определяется относительно пространственного расположения другой оси А заданием местоположения одной из ее концевых точек относительно положения другой оси А в цилиндрической системе координат (р, г, в) и заданием ориентации и длины оси S в сферической системе координат (i, ψ , s ) с центром в указанной концевой точке и сооеной осью А (б) [151 ] 313
в) Рис. 5.5. Значения углов и расстояний должно задаваться в отношении присоединения с учетом допустимых отклонений, чтобы особенности этих параметров отражались в представлении в явном виде. Один из способов достижения этой цели иллюстрируется схемами, позволяющими приписывать символические обозначения отдельными частями диапазонов значений угловых (а) и линейных (б) величин. В таблице (в) приведен пример отношений присоединения, записанных с помощью введенной символики для трехмерной модели тела человека, которая изображена на рис. 5 3. Векторы А и S соответствуют двум осям, связанным отношениями присоединения, записанными в строках таблицы (каждая строка задает одно отношение присоединения). При замене мнемонических имен в столбцах А и S внутренними ссылками на соответствующие трехмерные модели (если они существуют; в противном случае запись в соответствующей строке столбца отсутствует) в этой таблице будет иметься, в сущности, вся информация, содержащаяся в трехмерной модели [151] ние главной оси относительно оси модели, для того чтобы обеспечивались связи между элементами распределенной системы координат. Для задания положения в пространстве одной оси относительно другой требуются два трехмерных вектора. Один из способов такого задания проиллюстрирован рис. 5.4, на котором положение вектора Sотносительно вектора оси А задается с помощью двух векторов. Первый вектор, представленный в цилиндрической системе координат (р, r, θ ), задает начало вектора S относительно вектора А (рис. 5.4, а); второй вектор, представленный в сферической системе координат (i, φ, s ) задает собственно вектор S (рис. 5.4, 6). Мы будем называть этот объединенный набор координат (р, r, θ , i, φ , s ), совместно задающий вектор S отношением присоединения вектора S относительно вектора А. 314 Поскольку точность, с которой форма может представляться трехмерными моделями, непостоянна, то целесообразно значения длин и углов, входящих в отношение присоединения, также представлять с помощью некоторой системы, допускающей возможность изменения точности представления. Так, например, возможно, возникнет необходимость задать положение некоторой оси следующим образом: пусть компонент " рука (от плеча до локтя)" тела человека (см. рис. 5.3) находится почти на самом конце туловища (т. е. значение параметра р точно равно 0), значение угла в задано лишь очень приближенно, а на возможные значения угла t наложены лишь очень слабые ограничения. Пример соответствующей системы координат, допускающей возможность изменения точности представления, приведен на рис. 5.5. 5.4. ЕСТЕСТВЕННЫЕ ОБОБЩЕНИЯ Описанные способы представления информации о форме объекта, пожалуй наилучшим образом суммированные в иерархической схеме, приведенной на рис. 5.3, подводят нас к тому, каким образом можно справляться с проблемами описания формы. Возможно, если бы Дж. Л. Остин мог увидеть такой рисунок, он бы не воздевал в отчаянии руки по поводу надежд на установление правил представления формы своего кота (см. разд. 1.2)! Эти идеи тем не менее еще весьма приблизительны, и немного усилий было затрачено на их развитие после 1977 года, главным образом из-за того, что мы были поглощены подробным изучением процессов предварительной обработки информации в зрительной системе. В этот период, однако, часто поднимались проблемы, касающиеся путей обобщения этих идей. И хотя их решение в деталях еще не разработано, имеет смысл кратко определить те направления, в которых возможности обобщения представления наиболее очевидны. Первое направление, вероятно, связано с тем, что представление двухмерных конфигураций может осуществляться с тем же успехом, что и трехмерных, при условии, конечно, что представляемые образы обладают естественной продольной осью или осью симметрии. Следовательно, мы в равной мере в состоянии представлять как двухмерный набросок лица, так и признаки и различные подробности, выделяемые на реальной трехмерной голове. На рис. 5.6 приведен соответствующий простой пример. В этой связи особенно важно обратить внимание на то, что симметричность образа порождает каноническую ось, но не каноническое направление, совпадающее с этой осью. Остается еще определить, какому из направлений соответствует низ и какому — верх. Это решение необходимо принять в тот момент, когда начинается построение некоторой конкретной трехмерной модели, причем человек при принятии этого окончательного решения, по-видимому, ориентируется на то направление, которое в данный момент указывает вверх (обычно — вертикально вверх). Если вы строите подробное описание лица, придерживаясь этого правила, а затем переворачиваетесь и становитель на голову, детали становятся абсолютно нераспознаваемыми, возможно, из-за того, что после этого врожденный механизм принятия решений использует противоположное правило! Добавим к тому же, что, по-видимому, распознавание лиц осуществляется человеком с помощью достаточно точных, специализированных и 315
Рис. 5.6. Трехмерная модель двухмерного образа, изображающего лицо трехмерная модель лица в целом, осью модели служит ось симметрии лица; б—д — допустимые варианты трехмерных моделей основных составляющих образа поздно сформировавшихся процессов; читателям, интересующимся этой проблемой, следует обратиться к работе [32], а также к другим работам, ей посвященным. Второе направление связано с возможностью обобщить непроизводные элементы, используемые в представлении трехмерной модели, таким образом, чтобы они включали поверхностные непроизводные элементы, разделяющиеся в целом на два типа. Первый тип составляют неровные двухмерные прямоугольные поверхности различных размеров, содержащие объекты эллиптической и кругообразной форм. Обычному человеку требуется немного таких непроизводных элементов, хотя, очевидно, у такого скульптора, как X. Мур, их арсенал исчисляется сотнями. Непроизводный элемент второго типа воспроизводит не сплошной, а пустотелый объект, например нечто вроде чашки или трубки. Нетрудно убедиться в том, что такие непроизвод- 316
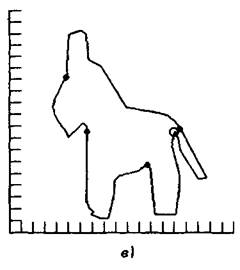
в) • г) Рис. 5.7. Примеры трехмерных моделей объектов достаточно сложной формы (а). Примеры объектов, при представлении которых может потребоваться использование поверхностных непроизводных элементов (б, в). Представление хорошо известного объекта (куба), построенное Хинтоном на основе нестандартного выбора оси, в роли которой выступает диагональ, связывающая противоположные вершины куба (г) ные элементы могут быть организованы примерно так же, как и исходное представление трехмерной модели; на рис. 5.7 проиллюстрировано несколько простейших способов использования подобного словаря непроизводных элементов для представления самых обычных предметов. Если допустить также использование в представлении криволинейных осей, то возможности представления объектов, с которыми мы постоянно сталкиваемся в повседневной жизни, существенно расширятся (см. рис. 5.7, а и особенно [88]). Другие важнейшие направления, по которым может идти обобщение описанных идей, связаны не столько с пространственной организацией формы некоторого заданного объекта, сколько с пространственными конфигурациями, образуемыми несколькими отдельными объектами. В этом случае требуются по меньшей мере три типа описаний. Первое должно обеспечивать задание положений объектов в некоторой стандартной системе пространственных координат, привязанной к наблюдателю, фиксируя эти положения через углы, под которыми объекты расположены относительно наблюдателя, и расстояния, отделяющие их от наблюдателя. Второе должно представлять расположение конфигураций относительно наблюдателя, например в виде отношения типа " Вы и два других человека образуете равносторонний треугольник". Важнейшими моментами в этом описании является учет позиции наблюдателя и представление в явном виде угловых отношений, т. е. внутренней структуры конфигурации. И наконец, должны быть представлены взаимные расположения ряда внешних объектов без учета их положения относительно наблюдателя. Так, например, три дерева могут быть расположены в один ряд или четыре здания могут образовывать квадрат. При этом возникают те же самые основные проблемы, с которыми мы уже сталкивались: каким образом следует выбирать соответствующую каноническую систему координат 317 для воспроизведения в явном виде пространственных отношений конфигураций? Сейчас уже ясно, каким образом следует подходить к решению такого рода задач представления; поэтому я не думаю, что эти проблемы могут создать непреодолимые трудности для разработчиков систем машинного зрения. Как мне кажется, основные трудности с точки зрения науки в данном случае связаны с тем, каким образом можно установить, какие именно системы и вычислительные схемы используются человеком в действительности. Я не рассчитываю на очень неожиданные ответы на эти вопросы, но сегодня просто не вижу способов экспериментального исследования проблем этого типа. По-видимому, поставить эксперименты для разрешения проблем, возникающих в связи с этими высшими уровнями анализа, значительно труднее, чем в случае проблем нижних уровней. Можно было бы, в сущности, сказать, что на этих высших уровнях вы начинаем сталкиваться со всеми теми проблемами, с которыми имеют дело лингвисты. Значительным достижением явилась бы разработка хорошего экспериментального метода исследования таких проблем. 5.5. ПОЛУЧЕНИЕ И ИСПОЛЬЗОВАНИЕ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНОЙ МОДЕЛИ Преимущества модульности, являвшейся одним из основных предметов наших забот при построении представления трехмерной модели, становятся особенно очевидными при обсуждении процессов, обеспечивающих получение и использование представления, приведенного к виду, удобному для распознавания. В частности, ни в одном из этих процессов ни при каких обстоятельствах не используются одновременно элементы, входящие в состав более чем одной трехмерной модели, даже в тех случаях, когда полное описание формы объекта включает ряд трехмерных моделей. Мы начнем обсуждение с рассмотрения основных проблем, связанных с выбором системы координат модели и осей ее компонентов и преобразованием определения осей применительно к наблюдателю в систему координат модели. Затем мы обсудим задачу распознавания этого описания, интерпретируя ее как задачу составления каталога описаний трехмерных моделей, хранящихся в памяти. И наконец, рассмотрим взаимодействие процесса получения описания трехмерной модели и процесса распознавания. Неоднозначность, вносимая центральной проекцией, часто означает, что непосредственно из изображения можно извлечь лишь приближенные данные о длине и ориентации осей формы объекта. Однако если процессы распознавания и получения описания консервативны, т. е. надежностью отличается вся информация, восстанавливаемая при распознавании, то на первых этапах процесса распознавания могут быть найдены дополнительные ограничения, что даст возможность получить более точное описание. Получение описания трехмерной модели Для того чтобы построить трехмерную модель, необходимо исходя из изображения задать систему координат и оси компонентов модели, а также оп-318 ределить взаимное расположение осей компонентов в этой системе координат. Даже в том случае, если форма объекта имеет некоторую каноническую систему координат и существует естественное разбиение на оси компонентов, то все еще остается проблема извлечения этих признаков на изображения. В настоящее время мы не располагаем ее полным решением, однако для объектов, формы которых входят в диапазон допустимых для представления трехмерной модели, некоторые результаты уже имеются. Так, например, как мы убедились в разд. 3.6, изображение оси некоторой обобщенной конической поверхности можно найти, опираясь на ограничивающие контуры, имеющиеся на изображении, при условии, что эта ось не очень сильно изменилась в результате перспективного сокращения. Пример разбиения, полученного таким методом, приведен на рис. 5.8, а его краткое описание дано в подри-суночной подписи. Отметим, что окончательное разбиение (рис. 5.8, е) получено по исходному контуру (рис. 5.8, а) без использования каких бы то ни было сведений о трехмерной форме объекта, выходящих за пределы допущения, согласно которому этот объект состоит из обобщенных конических поверхностей. Следовательно, этот метод можно использовать для отыскания осей компонентов трехмерной модели, представляющей форму объекта, который Вам до этого не был знаком. Полученный результат имеет несколько ограниченный характер, однако такова и используемая информация, а именно контуры, образованные касательными к краю некоторой гладкой поверхности. Интересно, что, как мы установили в разд. 3.2, именно эти контуры непригодны для использования ни в процессах обработки информации, обеспечивающих стереопсис, ни в процессах обработки информации, обеспечивающих восстановление структуры по движению, так как они не соответствуют каким-то определенным позициям на наблюдаемой поверхности. Складки и сгибы поверхности также порождают контуры изображения, и они еще требуют подробного изучения. Много еще работы предстоит и в области изучения способов использования информации о форме объекта, содержащейся в данных о затенении и в текстурных данных. Основные трудности возникают при анализе изображений в тех случаях, когда какая-либо важная ось оказывается скрытой: либо из-за того, что она подверглась перспективному сокращению, либо из-за того, что она загорожена какой-то другой частью объекта. Так, например, хотя нетрудно определить по виду сбоку систему координат, привязанную к туловищу лошади, для задания формы тела лошади в целом, эту задачу решить сложно, если лошадь расположена к наблюдателю анфас. Известны три способа разрешения этой проблемы. Первый предусматривает использование для распознавания частичных описаний, построенных по осям, видимым спереди. В этом случае представление несколько ухудшается с точки зрения выполнения критерия однозначности, но не в столь сильной степени, как это было бы при построении представления в системе координат наблюдателя. Второй способ предусматривает использование видимых компонентов формы объекта во всех тех случаях, когда они легко поддаются распознаванию, а форма объекта в 319
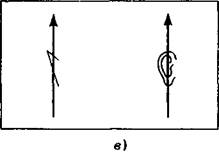
320 целом распознается с трудом. Так, например, обычно на виде лошади спереди прекрасно видна ее морда, которая поддается непосредственному распознаванию, обеспечивая новые возможности распознавания лошади в целом. Мы рассмотрим этот метод в конце данного раздела. И наконец, иногда удается восстановить ось, подвергшуюся перспективному сокращению, опираясь на радикальную симметрию изображения. Интересным примером служит ведро для воды, изображенное на рис. 5.9. По изображению, приведенному на рис. 5.9, а, можно определить главную ось ведра и его форму по этой оси с помощью методов, рассмотренных выше, однако этого нельзя сделать по изображению, приведенному на рис. 5.9, в, на котором главная ось ведра показана в перспективном сокращении. Вместо нее может появиться ось, восстановленная неправильно: она может, в частности, проходить через выступы, с помощью которых ручка прикрепляется к краям ведра. Неудача попытки получить с помощью этой неправильно определенной оди описание, поддающееся распознаванию, означала бы, однако, что истинная ось выражена на изображении не наиболее явным образом и что на нем можно увидеть и какую-то другую ось. Наличие двух концентрических окружностей (образованных верхним и нижним ободами ведра) является надежным свидетельством в пользу того, что главная ось проходит через их центры. Кроме того, в силу концентричности эти окружности могут быть разнесены вдоль оси на большое расстояние. Учет этой возможности может обеспечить получение искомого описания ведра, несмотря на неоднозначность идентификации ближнего к наблюдателю обода. Вероятно, существенную роль в интерпретации подобных изображений может играть карта локальных глубин поверхности (типа 2, 5-мерного эскиза), построенная с помощью стереопсиса, использования данных о затенении или текстурных данных. Установление связи между координатами, привязанными к наблюдателю, и координатами, привязанными к объекту Методы обнаружения осей на двухмерном изображении обеспечивают получение описания положений осей в некоторой системе координат, привязан - Рис. 5 8 Ограничивающие контуры объектов простой формы, состоящих из обобщенных конических поверхностей, можно использовать для определения проекций естественных осей конических поверхностей при условии, что эти оси не подвергались чрезмерному перспективному сокращению. Данный пример иллюстрирует один из алгоритмов решения этой задачи, использованный в программе, написанной П. Вейтаном. Исходные очертания (а) получены в результате применения процесса локальной группировки к первоначальному эскизу изображения игрушечного ослика. Сглаживание этих очертаний и разделение их на выпуклые и вогнутые участки позволило получить изображение (б) Затем были определены явно выраженные иходные точки сегментации, подобные глубоким впадинам, обозначенным кружками (в), и с помощью набора эвристических правил, использованных для соединения этих точек с другими точками, расположенными на контуре, была построена сегментация изображения (г) Области, построенные в результате сегментации, послужили источником для получения осей компонентов (д) Тонкими линиями (е) обозначены положения компонентов (головы, ног и хвоста) вдоль оси туловища, а также положения других компонентов (морды и уха) " ^ вдоль оси головы [151J 321
Рис. 5.9. Эти изображения ведра для воды иллюстрируют одно важное свойство, присущее любой системе, основанной на восстановлении канонических осей по изображению. Методы, которые целесообразно использовать для восстановления оси, приведенной на рис. 5.9, б, по изображению, приведенному на рис. 5.9, а, существенно отличаются от тех методов, которые наилучшим образом действуют в случаях, когда ось подвергается перспективному сокращению, как это имеет место на рис. 5, 9, в и г [151] ной к наблюдателю, и, следовательно, требуется некоторое преобразование, обеспечивающее перевод описаний осей в систему координат, привязанную к объекту. В представлении трехмерной модели расположения всех осей определяются отношениями присоединения, как это показано на рис. 5.4, и поэтому требуется какой-нибудь механизм для определения отношения присоединения по описанию двух соответствующих осей, заданному в системе координат, привязанной к наблюдателю. Мы будем называть этот механизм процессором преобразования пространства изображения. 322 Поскольку отношение присоединения — это единственное позиционное описание, требующее интерпретации, процессор преобразования пространства изображения может быть очень простым. Отношение присоединения (р, г, в, с, у, s ), как нам известно, представляет собой некоторое средство для задания положения вектора S относительно вектора оси А. Задача процессора преобразования пространства изображения состоит в том, чтобы была обеспечена возможность одновременного использования координат вектора S, заданных как в системе координат, привязанной к наблюдателю; так и в системе координат, привязанной к вектору А, т. е. чтобы при задании вектора S в одной из систем координат можно было пользоваться и его описанием, представленным во второй системе координат. Эта задача — нетрудная (дальнейшие подробности, можно найти в работе [151]). Точность определения отношений присоединения с помощью процессора преобразования пространства изображения ограничивается той точностью, с которой век'оры А и S задаются в системе координат, привязанной к наблюдателю. Поскольку при использовании прямоугольной проекции информация о глубине утрачивается, описания ориентации осей, получаемые по изображениям, воспроизводимым на сетчатке, с наименьшей точностью указывают значения углов, под которыми оси наклонены к наблюдателю или от него отклоняю гея. Параметры наклона оси часто удается определять по меньшей мере приближенно, используя данные стереопсиса, затенения, восстановления структуры по движению, а также данные, полученные в результате анализа текстур и контуров поверхности. Для увеличения точности описания наклонов можно также использовать и те ограничения, которые выявляются в результате осуществления процесса распознавания. Мы обсудим эту возможность ниже при рассмотрении проблемы взаимодействия процессов построения трехмерной модели и распознавания. |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 86; Нарушение авторского права страницы