
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Классификация трансформаторовСтр 1 из 15Следующая ⇒
Классификация трансформаторов 1. По своему назначению: -Силовые. Применяются в системах передачи и распределения электроэнергии; для установок со статическими преобразователями (ионными или полупроводниковыми) при преобразовании переменного тока в постоянный (выпрямители) или постоянного в переменный (инверторы); для получения требуемых напряжений в цепях управления электроприводами и в цепях местного освещения. -Силовые специального назначения (например, печные, сварочные т. п. трансформаторы). -Измерительные (трансформатор тока или напряжения). Используются для включения электрических измерительных приборов в сети высокого напряжения или сильного тока. -Испытательные. Для получения высоких и сверхвысоких напряжений, необходимых при испытаниях на электрическую прочность электроизоляционных изделий; -Радиотрансформаторы. Применяются в устройствах радио- и проводной связи, в системах автоматики и телемеханики для получения требуемых напряжений, согласования сопротивлений электрических цепей, гальванического разделения цепей и др. 2. По виду охлаждения: -Сухие. В сухих трансформаторах охлаждение осуществляется при естественной или принудительной конвенции воздуха, т.е. воздушное охлаждение. -Масляные. В масляных трансформаторах охлаждение осуществляется при естественной или принудительной циркуляции трансформаторного масла, т.е. масляное охлаждение. 3. По числу фаз питающей сети: -Однофазные. -Трехфазные. 4. По форме магнитопровода (сердечника): -Стержневые. -Броневые. -Тороидальные. -Овальные. 5. По числу обмоток: -Двухобмоточные. -Многообмоточные (одна первичная и две или более вто- ричных обмоток). 6. По конструкции обмоток: -Цилиндрические. -Концентрические. -Дисковые. 7. По соотношению напряжений обмоток: -Повышающий (U2> U1). -Понижающий (U2< U1 ).
Конструкция и основные параметры трансформаторов. На магнитопроводе, собранного из покрытых с 2х сторон тонким слоем изоляции листов электро-технич стали, помещают обмотки, имеющие W1 и W2 число витков. Первичная обмотка подключена к источнику, вторичная — к приёмнику. Обмотка с бОльшим числом витков — обмотка высшего напряжения, с меньшим — обмотка низшего напряжения. W1/W2=k - коэффициент трансформации. K = W1/W2 = E1/E2 = U1/U2xx(вторичное напр-е хх) = I1/I2н Если U1> U2, W1> W2, то тр-р понижающий. Если U1< U2, W1< W2, то тр-р повышающий. Магнито-движущие силы обмоток создают магнитные потоки, замыкающиеся в магнитопроводе и в воздухе. Магнитные линии основного потока Фст замыкаются в магнитопроводе и сцеплены с обеими обмотками. Магнитные потоки рассеяния Фр замыкаются частично в воздухе и сцеплены только с одной из обмоток. Номинальными параметрами тр-ра назыв параметы, указанные заводом изготовителем (Uн обмоток, Sн, Ixx(%от номинального), Uкз(%от номинального), Pxx, Pкз) Номинальная мощность тр-ра — полная мощность, отдаваемая его вторичной обмоткой при полной (номинальной) нагрузке. Принцип действия тр-ра основан на явлении Э/М индукции. Перем ток в первичной обмотке возбуждает в сердечнике переменный магнитный поток. Магнитный поток, пронизывая витки вторичной обмотки провоцирует в ней ЭДС. Под действием этой ЭДС во вторичной обмотке и через приёмник будет протекать ток. Для улучшения магнитной связи между обмотками используют стальной магнитопровод. Для уменьшения потерь от вихревых токов магнитопроводы составляются из изолированных пластин.
Опыт холостого хода и короткого замыкания.
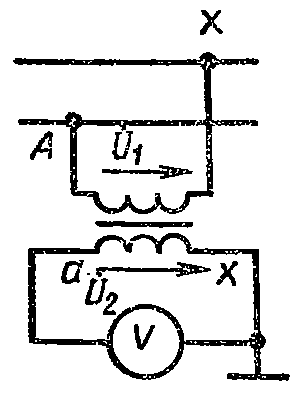
Опыт холостого хода. Холостым ходом называется режим работы трансформа- тора при разомкнутой вторичной обмотке. На первичную об- мотку подается номинальное, т.е. расчетное напряжение. Опыт холостого хода проводится по следующей схеме:
Подключим первичную обмотку к сети переменного то- ка. Перемещением движка автотрансформатора (Атр на схеме) установим по вольтметру V1 номинальное напряжение U1H и при этом напряжении снимем показания приборов. Ваттметр W покажет активную мощность Р 0. Амперметр А1 – ток I0. Полезная мощность равна 0, т.к вторичная обмотка разомкнута, т.е мощность на входе трансформатора в режиме холостого хода P0 расходуется на магнитные потери в магнитопроводе РМ и электрические потери в одной лишь первичной обмотке I0. I0 мал, он составляет ~0, 05 I 1н тока первичной обмотки при номинальной нагрузке. Следовательно, электрическими потерями первичной обмотки можно пренебречь и считать, что вся мощность холостого хода трансформатора представляет собой мощность магнитных потерь в стали магнитопровода. Поэтому магнитные потери в трансформаторе принято называть потерями холостого хода. По данным опыта определяют полное, активное и индук- тивное сопротивление холостого хода:
Z 0= U 1 xx / I 1 xx R0=P1xx/I1xx^2 X0=sqrt(Z0^2-R0^2) K=U1xx/U2xx Cosy = P1xx/(U1xx*I1xx) Опыт короткого замыкания Движок автотрансформатора Атр ставится в положение нулевого напряжения. Первичную обмотку автотрансформатора подключают к сети переменного тока. Плавно увеличивая напряжение перемещением движка автотрансформатора, по амперметру А1 устанавливают номинальное значение тока короткого замыкания первичной обмотки, т. е. I 1н = I 1к. При этом вовторичной обмотке устанавливается номинальный ток I 2н. При данном значении тока снимают показания приборов: по ваттметру W – мощность Р1к, по вольтметру V1 – напряжение короткого замыкания U 1к. Напряжение короткого замыкания U 1к является важным параметром трансформатора. Оно мало и составляет примерно 0, 05 U 1н. Это напряжение характеризует падение напряжения внутри трансформатора. Магнитный поток в магнитопроводе трансформатора пропорционален первичному напряжению U1, но так как оно мало и составляет примерно 0, 05 U 1н, то магнитными потерями можно пренебречь. Следовательно, в опыте короткого замыкания почти вся мощность трансформатора равна мощности электрических потерь в проводах первичной и вторичной обмоток (потери в меди).
Cosy =P1k/(U1k*I1k) K =I2k/I1k Zk = U1k/I1k Rk = P1k/I1k^2
5. Серега
Трансформаторы напряжения К ТН подключают вольтметры и другие приборы, реагирующие на действующее значение и фазу напряжения.
ТН работает в режиме, близком к режиму ХХ. Показания вольтметра необходимо умножить на коэффициент трансформации или шкалу прибора проградуировать с учётом этого коэффициента. Через измерительные трансформаторы можно устанавливать измерительные и контрольные приборы на значительном расстоянии от первичных электрических цепей и монтировать их на щите, пульте, что удобно для оперативного ведения работы. Выполняются ТН одно- и трёхфазными, сухими и масляными. Класс точности от 0.2 до 3 (погрешность коэффициента трансформации в процентах). Погрешность прибора: 0.2 – образцовые и для точных лабораторных измерений, 0.5 – для присоединения электросчётчиков, 1 и 3 – для присоединения щитовых измерительных приборов, 0.5 и 1 и 3 – для присоединения цепей релейной защиты. Трёхфазные ТН выполняются на напряжения до 20 кВ. Обычно используют ТН с бумажной изоляцией, пропитанной маслом. Обозначения ТН: Н – трансформатор напряжения, Т – трёхфазный, О – однофазный, М – масляный, С – сухой, К – залитый компаундом или с компенсирующей обмоткой, И – пятистержневой со схемой соединения разомкнутого треугольника ля подключения приборов контроля изоляции. Цифры обозначают номинальное напряжение.
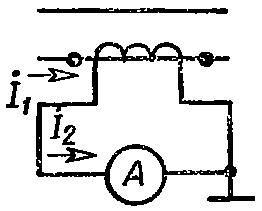
Трансформаторы тока ТТ служат для подключения амперметров, а также токовых катушек и реле защиты. Первичную обмотку включают последовательно с приёмником энергии, и ток в ней равен току нагрузки. I1=Iнагр.
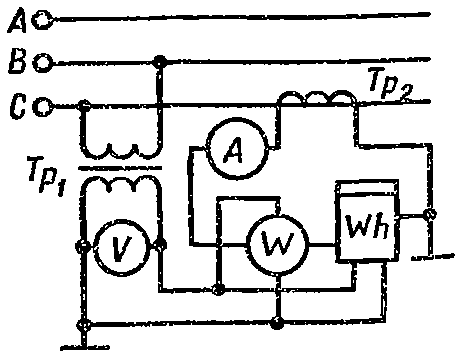
Вторичная обмотка замкнута на амперметр, имеющий малое сопротивление, поэтому ТТ работает в режиме КЗ. Разрыв вторичной цепи ТТ недопустим, так как резко возрастает напряжение на вторичной обмотке, возможен пробой изоляции, КЗ, поражение персонала и т.д. По точности измерительные трансформаторы делят на классы: 0.2; 0.5; 1; 3; 5, определяемые допустимой погрешностью коэффициента трансформации в процентах. Обозначения ТТ: Т – трансформатор тока, П – проходной (если нет буквы - опорный), О – одновитковый, М – многовитковый, Л – литая изоляция, Ф – фарфоровая изоляция. Цифры обозначают номинальное напряжение. Схема включения вольтметра, амперметра, ваттметра и счётчика через ТН (Тр1) и ТТ (Тр2).
Автотрансформаторы
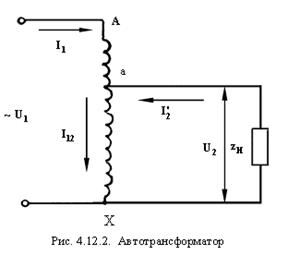
Автотрансформа́ тор — вариант трансформатора, в котором первичная и вторичная обмотки соединены напрямую, и имеют за счёт этого не только магнитную связь, но и электрическую. Обмотка автотрансформатора имеет несколько выводов (как минимум 3), подключаясь к которым, можно получать разные напряжения. Преимуществом автотрансформатора является более высокий КПД, поскольку лишь часть мощности подвергается преобразованию — это особенно существенно, когда входное и выходное напряжения отличаются незначительно. Недостатком является отсутствие электрической изоляции (гальванической развязки) между первичной и вторичной цепью. В промышленных сетях, где наличие заземления нулевого провода обязательно, этот фактор роли не играет, зато существенным является меньший расход стали для сердечника, меди для обмоток, меньший вес и габариты, и в итоге — меньшая стоимость. В автотрансформаторе (рис. 4.12.2) часть витков в обмотке высшего напряжения используется в качестве обмотки низшего напряжения, т.е. в автотрансформаторе имеется всего лишь одна обмотка, часть которой (а Х) принадлежит одновременно сторонам высшего напряжения и низшего напряжения. На участке аХ протекает ток i12 = i2 - i1, или переходя к действующим значениям, учитывая, что I1 и I2 находятся в противофазе, можно записать
Таким образом, величина тока в общей части обмоток равна разности токов I1 и I2.
Учитывая, что
Здесь U2 I1 = SЭ, есть мощность, поступающая во вторичную цепь электрическим путем, U2 I12 = Sм - мощность, поступающая во вторичную цепь посредством магнитного потока.
Устройство Неподвижная часть машины называется статором, подвижная часть - ротором. Сердечники статора и ротора асинхронных машин собираются (шихтуются) из отдельных листов электротехнической стали Статоры синхронных и асинхронных машин имеют одинаковую конструкцию. Магнитопровод набран из штампованных листов электротехнической стали толщиной 0, 35-0, 5 мм, в пазы которых уложена распределённая трехфазная обмотка, создающая круговое вращение магнитного поля с двумя p-полюсами. Обмотка статора выполняется трехфазной, подсоединяется к сети трехфазного тока и называется первичной обмоткой. К конструктивным частям статора относятся: станина, в которую устанавливается магнитопровод, и подшипниковые щиты, служащие для поддерживания вала. Обмотка ротора может быть выполнена трехфазной аналогично обмотке статора. Концы фаз такой обмотки ротора соединяются обычно в «звезду», а начала с помощью контактных колец и металлографитных щеток выводятся наружу. Такая асинхронная машина называется машиной с фазным ротором. К контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Фазная обмотка ротора выполняется с тем же числом полюсов, как и статорная обмотка. Другая разновидность обмотки ротора - обмотка в виде беличьей клетки (рисунок). Концы стержней такой обмотки с обоих торцов соединены накоротко кольцами, поэтому обмотка выводов не имеет. Такая асинхронная машина называется машиной с короткозамкнутым (к.з.) ротором. В машинах мощностью до 100 кВт обмотка ротора выполняется путем заливки алюминием. В более крупных машинах применяется медная сварная обмотка.
Отсутствие скользящего контакта на роторе обеспечивает высокую надежность работы такого двигателя, а простота технологии изготовления - дешевизну. По этим причинам асинхронные двигатели с к.з. ротором находят широкое применение и составляют основной парк электрических машин. Воздушный зазор между статором и ротором в асинхронных машинах выполняется минимально возможным по условиям производства и надежности работы. В машинах мощностью в несколько киловатт величина зазора составляет около 0, 5 мм, с ростом мощности и габаритов машины величина зазора увеличивается. Принцип действия Статорная обмотка создаёт вращающийся поток, который пересекает проводники обмотки ротора и подводимую в них ЭДС Е2, вызывающую ток I2. Вследствие взаимодействия тока ротора с потоком машины создаётся электромагнитный момент. Поля обмотки ротора и статора взаимодействуют, вследствие чего поле машины деформируется и возникает электромагнитная сила, направленная в сторону вращения магнитного потока. Магнитный поток статора как бы увлекает за собой ротор. Для образования ЭДС необходимо, чтобы частоты вращения ротора W и магнитного поля W 0 отличались друг от друга. Мерой этого отличия является скольжение: S = ( W 0 - W ) / W 0 = ( n 0 - n ) / n 0 Скольжение – отношение частоты вращения магнитного поля статора относительно вращающегося ротора к частоте поля статора. Характеризует отставание вращающегося ротора относительно поля статора. Токи ротора с частотой f 2 = s / f 1 образуют магнитное поле, вращающееся относительно ротора с частотой W 2 s =2 p f 2 / p = 2 p f 1 s / p = W 0 s a относительно статора — с частотой W 2 = W 2 s + W = (1 - s ) W 0 + sW 0 = W 0 Tаким образом, магнитное поле ротора синхронной машины вращается с той же частотой, что и магнитное поле статора. В асинхронной машине – наоборот. У синхронных машин частота вращения ротора определяется частотой переменного тока. Ротор синхронной машины представляет собой электромагнит с сосредоточенной (явнополюсный ротор) или распределенной (неявнополюсный ротор) обмоткой, называемой обмоткой возбуждения, к которой через контактные кольца и щетки подведен постоянный ток возбуждения. Число пар полюсов ротора равно числу пар полюсов обмотки статора При этом магнитные полюсы статора и ротора неподвижны относительно друг друга и сдвинуты на некоторый угол, в результате чего взаимодействие полей статора и ротора создает механический момент: вращающий - в синхронном двигателе (магнитное поле статора опережает магнитное поле ротора) или тормозящий — в синхронном генераторе (магнитное поле статора отстает от магнитного поля ротора). Вращающееся магнитное поле ротора индуцирует в трех обмотках статора ЭДС частотой w 1 = p W:: e A = Em sin p W t eB = Em sin ( p W t - 2 p /3) eC = Em sin ( p W t + 2 p /3) Действующее значение ЭДС: E = 4, 44 f 1 w F m Частота ЭДС в статоре: f 1 = pn / 60 = p W / (2 p ) Принцип действия синхронного двигателя. Принцип действия синхронного двигателя основан на явлении притяжения разноименных полюсов двух магнитных полей – статора и ротора. На рис. 4.6 полюсы статора N и S показаны штриховкой, вращаются они против часовой стрелки с частотой Предположим, что ротор каким-либо способом разогнан до синхронной частоты вращения
В режиме идеального холостого хода (момент сопротивления Если к валу машины приложить механическую нагрузку, которая создает момент сопротивления Машина работает в двигательном режиме, её вращающий момент
Баланс мощностей Баланс мощности – система показателей, характеризующая соответствие суммы значений нагрузок потребителей энергосистемы (ОЭС) и необходимой резервной мощности величине располагаемой мощности энергосистемы. Для любых замкнутых цепей сумма мощностей источников электрической энергии РИ, равна сумме мощностей, расходуемых в приемниках энергии РП. Мощность источников указывает на то, какое количество работы они могут выполнить в электрической цепи каждую секунду. Максимально допустимая мощность приемников это то, что в нормальных условиях может выдержать пассивный элемент. Если превысить допустимую мощность резисторов, обычно указываемую на корпусе, то он может перегреться, его проводящий слой разрушится, почернеет окраска корпуса и деталь выйдет из строя. Мощность, отдаваемая источниками ЭДС, равна. PИ = E I
где: I — ток (А), протекающий через этот источник, причем если положительное направление тока совпадает с направлением ЭДС, в противном случае PИ = -EI. Если в резисторе не происходит химических реакций, то мощность выделяется в форме тепла, согласно известному закону Джоуля. PП = R I2 где: I — постоянный ток (А), протекающий через резистор; PП — мощность потерь, измеряемая в ваттах (Вт); R — сопротивление резистора (Ом). Общее количество теплоты, выделяемое током в цепи, не всегда совпадает с соответствующим джоулевым теплом. Так на месте контакта двух различных проводников, помимо джоулева тепла, выделяется также, так называемое тепло Пельтье, зависящее от сторонних ЭДС, определяемых в свою очередь химической природой проводников, их температурой и т.д. При наличии в проводнике градиента температур в нем выделяется еще и теплота Томсона. В большинстве практических случаев при небольших токах теплотой Пельтье и Томсона можно пренебрегать. Равенство выражений мощностей источников и мощностей приемников называется уравнением баланса мощностей. План составления баланса мощностей 1.Если в цепи есть источники тока, то следует любым методом найти напряжения на зажимах источников тока Uk.
Цепи с источником тока
2.Вычислить мощность источников.
N — количество источников тока в цепи; M — количество источников ЭДС в цепи; Uk — напряжение на источниках тока Jk;
3.Вычислить мощность, расходуемую в приемниках.
L — количество приемников в цепи; L
— арифметическая сумма, здесь должны быть учтены как внешние резисторы, так и внутренние сопротивления самих источников. 4.Получаем равенство.
Пусковые свойства двигателя Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками: а) величиной пускового тока Iп или его кратностью Iп/ I1н; б) величиной пускового момента Мп или его кратностью Мп/Мн; в) продолжительностью и плавностью пуска двигателя в ход; г) сложностью пусковой операции; д) экономичностью пусковой операции (стоимость и надежность пусковой аппаратуры). В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током холостого хода, величина пускового тока Iп будет равна Iп = U1 / (√ [(r1 + r’2)2 + (x1 + x’2)2]). Следовательно, улучшить пусковые свойства двигателя можно путем увеличения активного сопротивления цепи ротора r’2, так как в этом случае уменьшается пусковой ток и увеличивается пусковой момент. В то же время напряжение U1 по-разному влияет на пусковые характеристики: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно это вызывает уменьшение пускового момента. Возможность применения того или иного способа улучшения пусковых характеристик определяется условиями эксплуатации двигателя и требованиями, которые к нему предъявляются.
Практически используются следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к двигателю при пуске; подключение к обмотке ротора пускового реостата. Прямой пуск применяется для двигателей малой и средней мощности. Обычно при прямом пуске действующее значение пускового тока превосходит номинальное значение в четыре - шесть раз. Прямой пуск самый распространенный способ пуска в ход асинхронных двигателей. Недостатками его являются: большой пусковой ток и сравнительно малый пусковой момент, достоинство - простота. Пуск асинхронного двигателя при пониженном напряжении применяют для двигателей большой мощности. Понижение напряжения может осуществляться тремя способами: а) путем переключения обмотки статора при пуске с нормальной схемы " треугольник" на пусковую схему " звезда". В этом случае фазовое напряжение уменьшается в Недостаток этого способа пуска состоит в том, что уменьшение напряжения в Ù 1/U1н раз сопровождается уменьшением начального пускового момента Мп двигателя в (Ù 1/U1н)2 раз. Необходимое сопротивление реактора определяется по формуле: xp = [U1н(1 - Kp)]/KpIп, где U1н – номинальное (фазное) напряжение статорной обмотки; Kp = I’п /Iп – отношение пускового тока статора при пуске к пусковому току двигателя при пуске непосредственным включением в сеть; обычно Kp = 0, 65. б) путем включения в цепь статора на период пуска добавочных активных или реактивных сопротивлений. в) путем подключения двигателя к сети через понижающий автотрансформатор. Секции трансформатора в процессе пуска переключаются соответствующей аппаратурой. Автотрансформаторный способ пуска, как и другие способы пуска асинхронных двигателей, основанные на уменьшении подводимого напряжения, сопровождается уменьшением пускового момента, так как величина последнего прямо пропорциональна квадрату напряжения. С точки зрения пусковых токов и пусковых моментов, автотрансформаторный способ пуска выгоднее реакторного, так как при одинаковом уменьшении напряжения пусковой ток при реакторном способе пуска уменьшается в U’1 / U1н раз, а при автотрансформаторном способе пуска – в (U’1 / U1н)2 раз. Но сложность пусковой операции и высокая стоимость аппаратуры несколько ограничивают применение автотрансформаторного способа пуска асинхронных двигателей. Недостатком всех этих способов является значительное уменьшение пускового момента, который пропорционален квадрату приложенного напряжения. Поэтому пуск асинхронного двигателя при пониженном напряжении может применяться только при пуске двигателей без нагрузки. Пуск с помощью пускового реостата применяется для двигателей с фазовым ротором. Этим способом можно осуществить пуск двигателя при
Синхронный двигатель Синхронной называется электрическая машина, скорость вращения n (об/мин) которой связана постоянным отношением с частотой n = 60 * f / p (где р — число пар полюсов машины) сети переменного тока, в которую эта машина включена. Синхронный двигатель – синхронная машина, работающая в режиме двигателя. В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянна при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы).
Рис. 1 Рассмотрим принцип работы синхронного двигателя на модели
Вращающееся магнитное поле статора представим в виде магнита 1. Намагниченный ротор изобразим в виде магнита 2. Повернем магнит 1 на угол α. Северный магнитный полюс магнита 1 притянет южный полюс магнита 2, а южный полюс магнита 1 - северный полюс магнита 2. Магнит 2 повернется на такой же угол α. Будем вращать магнит 1. Магнит 2 будет вращаться вместе с магнитом 1, причем частоты вращения обоих магнитов будут одинаковыми, синхронными,
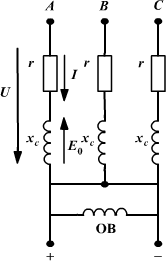
Синхронный реактивный двигатель - это синхронный двигатель, на роторе которого отсутствует обмотка возбуждения. Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов. В настоящее время применяется асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Вращающее магнитное поле статора индуктирует в короткозамкнутой пусковой обмотке вихревые токи. При взаимодействии этих токов с магнитным полем статора образуется асинхронный электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приближается к частоте вращения статорного поля, двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю. На рис. 6.16 показана простейшая схема трехфазного синхронного двигателя. К обмотке статора подведено трехфазное переменное напряжение, к обмотке возбуждения — постоянное напряжение.
по второму правилу Кирхгофа составим уравнение откуда определим ток якоря На рис. 6.17 показана векторная диаграмма двигателя при определенных значениях механической нагрузки и тока возбуждения.
Синхронному двигателю соответствуют такие же уравнения для мощностей, как и для синхронного генератора, но смысл их будет иным. В двигательном режиме работы синхронной машины
Электромагнитный момент двигателя выражается через мощность и угловую частоту вращения:
Уравнение угловой характеристики синхронного двигателя:
Угловая характеристика показана на рис. 6.18. При постоянных значениях
Рабочая часть характеристики при условно положительном направлении вращения двигателя расположена в первом квадранте. Часть характеристики, расположенная в пределах При номинальном моменте двигателя
Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc. Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью. Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя. Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п. Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Классификация трансформаторов 1. По своему назначению: -Силовые. Применяются в системах передачи и распределения электроэнергии; для установок со статическими преобразователями (ионными или полупроводниковыми) при преобразовании переменного тока в постоянный (выпрямители) или постоянного в переменный (инверторы); для получения требуемых напряжений в цепях управления электроприводами и в цепях местного освещения. -Силовые специального назначения (например, печные, сварочные т. п. трансформаторы). -Измерительные (трансформатор тока или напряжения). Используются для включения электрических измерительных приборов в сети высокого напряжения или сильного тока. -Испытательные. Для получения высоких и сверхвысоких напряжений, необходимых при испытаниях на электрическую прочность электроизоляционных изделий; -Радиотрансформаторы. Применяются в устройствах радио- и проводной связи, в системах автоматики и телемеханики для получения требуемых напряжений, согласования сопротивлений электрических цепей, гальванического разделения цепей и др. 2. По виду охлаждения: -Сухие. В сухих трансформаторах охлаждение осуществляется при естественной или принудительной конвенции воздуха, т.е. воздушное охлаждение. -Масляные. В масляных трансформаторах охлаждение осуществляется при естественной или принудительной циркуляции трансформаторного масла, т.е. масляное охлаждение. 3. По числу фаз питающей сети: -Однофазные. -Трехфазные. 4. По форме магнитопровода (сердечника): -Стержневые. -Броневые. -Тороидальные. -Овальные. 5. По числу обмоток: -Двухобмоточные. -Многообмоточные (одна первичная и две или более вто- ричных обмоток). 6. По конструкции обмоток: -Цилиндрические. -Концентрические. -Дисковые. 7. По соотношению напряжений обмоток: -Повышающий (U2> U1). -Понижающий (U2< U1 ).
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 349; Нарушение авторского права страницы




 , ее можно записать в виде:
, ее можно записать в виде: 

 . Поле ротора создается постоянным током, протекающим по обмотке ротора.
. Поле ротора создается постоянным током, протекающим по обмотке ротора. против часовой стрелки. Тогда полюсы ротора
против часовой стрелки. Тогда полюсы ротора  и
и  будут вращаться с частотой
будут вращаться с частотой  и
и  (см. штрихованные линии на рис. 4.6).
(см. штрихованные линии на рис. 4.6).
 ) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы
) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы  и
и  , которые не создают ни вращающего момента, ни момента сопротивления.
, которые не создают ни вращающего момента, ни момента сопротивления. , ось ротора и его полюсов
, ось ротора и его полюсов  (рис. 4.6, б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор.
(рис. 4.6, б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. преодолевает момент сопротивления механической нагрузки. При увеличении момента механической нагрузки
преодолевает момент сопротивления механической нагрузки. При увеличении момента механической нагрузки  , причем частота вращения ротора остается неизменной и равной
, причем частота вращения ротора остается неизменной и равной 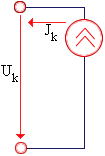
 k = 1
k = 1
 раз, что обуславливает уменьшение фазовых токов в
раз, что обуславливает уменьшение фазовых токов в  и резко уменьшить пусковой ток. Двигатели с фазовым ротором применяют только при тяжелых условиях пуска (когда необходимо развивать максимально возможный пусковой момент), при малой мощности электрической сети или при необходимости плавного регулирования скорости вращения.
и резко уменьшить пусковой ток. Двигатели с фазовым ротором применяют только при тяжелых условиях пуска (когда необходимо развивать максимально возможный пусковой момент), при малой мощности электрической сети или при необходимости плавного регулирования скорости вращения.

 (6.30)
(6.30) (6.31)
(6.31) Рис. 6.17
Рис. 6.17 представляет собой потребляемую из сети мощность. Вычитанием из этой мощности потерь мощности в обмотке якоря получается электромагнитная мощность, преобразуемая в механическую:
представляет собой потребляемую из сети мощность. Вычитанием из этой мощности потерь мощности в обмотке якоря получается электромагнитная мощность, преобразуемая в механическую:  (6.32)
(6.32)
 (6.33)
(6.33) (6.34)
(6.34) электромагнитный момент синхронного двигателя пропорционален
электромагнитный момент синхронного двигателя пропорционален 

 , называется устойчивой. Для устойчивой части характеристики характерно выполнение общего принципа саморегулирования электрических машин: увеличение момента нагрузки приводит к увеличению момента двигателя до такого же уровня. Часть характеристики, расположенная в пределах 90…180, называется неустойчивой, так как увеличение момента нагрузки в этой области приводит к остановке двигателя.
, называется устойчивой. Для устойчивой части характеристики характерно выполнение общего принципа саморегулирования электрических машин: увеличение момента нагрузки приводит к увеличению момента двигателя до такого же уровня. Часть характеристики, расположенная в пределах 90…180, называется неустойчивой, так как увеличение момента нагрузки в этой области приводит к остановке двигателя. угол
угол  находится в пределах
находится в пределах  , а отношение
, а отношение  . Это отношение характеризует перегрузочную способность двигателя. Перегрузочная способность может быть увеличена за счет повышения ЭДС
. Это отношение характеризует перегрузочную способность двигателя. Перегрузочная способность может быть увеличена за счет повышения ЭДС 
 ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.