
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Розділ 6. АЛГОРИТМІЗАЦІЯ ЗАДАЧ ПРОГРАМНОГО УПРАВЛІННЯ В СИСТЕМАХ ВИКОНАВЧОГО РІВНЯ ГВССтр 1 из 17Следующая ⇒
Розділ 6. АЛГОРИТМІЗАЦІЯ ЗАДАЧ ПРОГРАМНОГО УПРАВЛІННЯ В СИСТЕМАХ ВИКОНАВЧОГО РІВНЯ ГВС Структура реалізації геометричної задачі ЧПУ в технологічному устаткуванні ГВС Геометрична задача ЧПУ, як перша й основна функція програмного управління устаткуванням, включає кілька фаз реалізації процесу ЧПУ і може бути визначена наступним чином: відобразити геометричну інформацію креслення в сукупність таких формоутворюючих рухів робочого органу (РО) технологічного обладнання верстата, що матеріалізують креслення в кінцевому виробі. Перша фаза цього інформаційного перетворення в процесі ЧПУ полягає у підготовці (програмуванні) та введенні управляючої програми ЧПУ, а також у виконанні підготовчих розрахунків у машинному масштабі часу. У сучасних пристроях ЧПУ обов’язково передбачена можливість ручного введення та редагування управляючих програм з панелі оператора і збереження архіву управляючих програм у пам’яті. Існує тенденція використання в рамках першої фази процесу ЧПУ елементів автоматизованої розробки управляючих програм із залученням елементів діалогу і техніки меню. Другу фазу в процесі ЧПУ складають обчислення, виконувані в реальному часі. Сюди відносяться: інтерполяція (складність якої обумовлена формою траєкторії, що інтерполюється, і розмірністю інтерпольованого простору); розрахунки розгонів і гальмувань; стикування кадрів управляючої програми; аналіз робочого простору; корекція подачі; аналіз і логічна обробка інформації про стан циклових механізмів верстата тощо. Обчислення супроводжуються підготовкою даних для візуалізації всієї оперативної інформації. Обчислення другої фази, як правило, вимагають складних і точних розрахунків, що повторюються з високою частотою. Третю фазу в процесі ЧПУ складає управління приводами, що здійснюється в реальному часі. Найбільшу частку займають тут розрахунки, пов’язані із замкненням контурів слідкуючих приводів подачі та корекцією систематичних похибок гвинтових пар верстата. Трудомісткість розрахунків прямопропорційна числу керованих координат, загальне число яких досягає іноді десяти, дванадцяти. Інша частина роботи, виконуваної в межах третьої фази, відноситься до керування численними приводами циклових механізмів верстата і до прийому сигналів, що визначають стани (положення) зазначених приводів. Нижче докладно викладається суть кожної фази реалізації геометричної задачі ЧПУ.
Технологія програмування формоутворення деталей та руху робочого органу технологічного устаткування ГВС Інтерполяція формоутворення деталей Методи оцінної функції Відповідно до методу оцінної функції виконується моделювання алгебраїчного рівняння відтвореної кривої, тобто в основу рішення покладений розв’язок алгебраїчних рівнянь. Суть методу полягає в тому, що за результатом кроку вздовж будь-якої керованої координати обчислюється допоміжна (оцінна) функція F, знак якої визначає напрямок наступного кроку, причому переміщення, що виникає в результаті цього кроку, наближає траєкторію, що відпрацьовується, до заданої кривої. Всі обчислення ведуться в цілих числах – одиницях дискрет, тобто величина кроку дорівнює дискреті. Нехай інтерполяції підлягає деяка довільна крива, що описується рівнянням 0 = у – f(х), де х – координата по осі абсцис (аргумент функції); у – координата по осі ординат (значення функції), або рівнянням 0 = x – f¢ (y) при протилежному напрямку осей координат (рис. 6.18). Тоді оцінна функція має вигляд: F = у – f(х) або F = x – f¢ (y). Для оцінної функції F самого загального виду справедливе твердження: F = 0, якщо точка, що відтворює необхідну траєкторію, знаходиться на заданій кривій; F > 0, якщо точка, що відтворює необхідну траєкторію, знаходиться в області вище кривої; F < 0, якщо згадувана точка знаходиться в області нижче кривої.
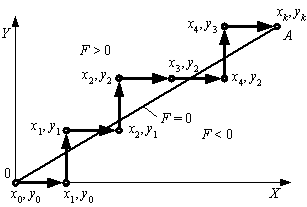
Рис. 6.18. Реалізація інтерполяційних рухів методом оцінної функції Таким чином, знак оцінної функції F може послужити індикатором того, у якому напрямку варто зробити черговий крок заданої траєкторії. Якщо поточна точка траєкторії інтерполяції знаходиться в області F > 0 або F = 0, то наступний крок з переміщення на дискрету виконується по осі абсцис. Якщо поточна точка траєкторії інтерполяції знаходиться в області F < 0, то наступний крок по переміщенню на дискрету виконується по осі ординат. Кроки виконуються безперервно (з частотою, що визначається блоком задання швидкості) доти, поки траєкторія інтерполяції не досягне кінцевої точки переміщення. У точці 1 (х0, y0) оцінна функція F = 0, робимо крок по осі X. Черговою точкою, що відтворює необхідну траєкторію, стане точка 2 (х0 + 1, y0). Ця точка знаходиться в області F < 0. Отже, новий крок повинен бути зроблений по осі Y і т.д. Із наведених міркувань випливає, що для управління потрібно лише знати спосіб визначення знака F. Такий спосіб у загальному вигляді отримати не можна, однак він без великих зусиль встановлюється для конкретної траєкторії, що інтерполюється. Лінійна інтерполяція методом оцінної функції. При лінійній інтерполяції рівняння траєкторії буде мати вигляд: 0 = yiX – xiY, де xi, yi – координати поточної точки прямої лінії; X, Y – кадрові прирости по осях X, Y (або координати xk, yk кінцевої точки відносно початкової точки відрізка лінії). Оцінна функція для прямої лінії з І квадранта площини (правої декартової системи координат) має вигляд: Fi = yiX – xiY. Цей вираз дозволяє обчислювати оцінну функцію і визначати її знак. Нехай зроблений крок в одну дискрету по осі X. Тоді: Fi+1 = yiX – (xi + 1)Y = (yiX – xiY) – Y = Fi – Y. Нехай зроблений крок в одну дискрету по осі Y. У цьому випадку: Fi+1 = (yi + 1)X – xiY = (yiX – xiY) + X = Fi + X. Таким чином, обчислення нового значення оцінної функції опираються на попереднє значення, що зберігається. Оскільки початкове значення оцінної функції дорівнює 0, всі наступні її значення визначаються тільки за допомогою величин кадрових приростів, вибраних з програми. При цьому знак оцінної функції, отриманий в результаті чергового кроку, визначає напрям наступного кроку. Так, пряма ОА, що інтерполюється (рис. 6.19), ділить площину XY на дві області: F > 0 і F < 0. Область F > 0 знаходиться над прямою, а область F < 0 – нижче від неї. Відрізок прямої ОА, що інтерполюється, є областю, де F = 0.
Рис. 6.19. Лінійна інтерполяція методом оцінної функції Якщо проміжна точка траєкторії інтерполяції знаходиться в області F < 0, то наступний крок переміщення на одну дискрету виконується по осі X. Якщо ж проміжна точка траєкторії знаходиться в області F < 0, то наступний крок виконується по осі Y. Оскільки робота відбувається у відносній системі координат, початок відрізка, що інтерполюється, завжди знаходиться у початку координат. При цьому початкова точка траєкторії інтерполяції знаходиться на початку відрізка, що інтерполюється (в області F = 0), і має координати x0 = 0, y0 = 0. Якщо відрізок лінії розташований в інших квадрантах координатної площини, то для застосування наведених формул і алгоритму інтерполяції необхідно попередньо виконати перехід до І квадранта. У випадку, якщо кут нахилу лінії до осі абсцис складає більше 45°, то доцільно поміняти місцями координати (x¢ = y, y¢ = x) і врахувати це у формулах. Кругова інтерполяція методом оцінної функції. При круговій інтерполяції рівняння відтвореної траєкторії буде мати вигляд:
а оцінна функція:
де xi, yi – координати поточної точки кола; x0, y0 – координати початкової точки дуги відносно її центра. У випадку руху в І квадранті проти годинникової стрілки отримаємо наступні вирази для оцінної функції: – при кроці по осі Х координата xi+1 = xi – 1, а оцінна функція:
– при кроці по осі Y координата yi+1 = yi + 1, а оцінна функція:
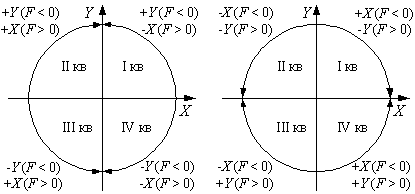
Оскільки початкове значення оцінної функції дорівнює нулю, всі наступні значення цієї функції визначаються поточними координатами траєкторії інтерполяції. Як випливає з наведених формул і алгоритму, на кожному кроці потрібно обчислити тільки одну змінну F. Всього можливі вісім варіантів обходу чотирьох квадрантів кола. Правила вибору напрямку кроку для цих випадків показані на рис. 6.20.
Рис. 6.20. Правило вибору кроку при інтерполяції з оцінною функцією в залежності від напрямку руху та квадранта Кругова інтерполяція методом оцінної функції полягає в наступному (рис. 6.21). Коло, на якому розташований відрізок дуги, що інтерполюється, ділить площину XY на дві області: F > 0, що лежить поза колом, і область F < 0, що лежить в середині кола; саме коло є областю, де F = 0. Відрізок дуги, що інтерполюється, має початкову точку з координатами x0, у0 і кінцеву точку з координатами xk, yk (початок відносних координат знаходиться в центрі кола). Якщо проміжна точка траєкторії інтерполяції (наприклад, точка з координатами (x1, у3)) знаходиться в області F > 0, то наступний крок робиться по осі X. Якщо ж проміжна точка траєкторії інтерполяції (наприклад, точка з координатами (x2, у3)) знаходиться в області F < 0, то наступний крок робиться по осі Y.
Рис. 6.21. Кругова інтерполяція методом оцінної функції Отже, за кожний поточний відрізок часу лінійно-круговий інтерполятор повинен відпрацьовувати один з чотирьох можливих режимів:
Алгоритм інтерполяції методом оцінної функції досить просто реалізується програмно або апаратно. Всі операції режиму виконуються одночасно протягом одного періоду роботи. У випадку апаратного виконання інтерполяції тривалість одного періоду роботи визначається часом обертання кодів у регістрах зсуву, на яких побудований інтерполятор. За цей час повинен бути встановлений потрібний режим роботи, коди чисел, що містяться в регістрі (наприклад, код величини поточної координати xi), повинні бути виведені з нього шляхом зсуву з одночасним виконанням арифметичних операцій над цими кодами (xi+1 = xi ± 1), а коди нового значення цих величин (xi+1) – введені в регістр. Введення та виведення кодів відбувається одночасно – молодший розряд нового коду йде відразу ж за старшим (знаковим) розрядом попереднього коду. Проте, підвищені вимоги до шорсткості утворюваної поверхні вимагають заміни покоординатного руху при інтерполяції. З цієї метою був розроблений наступний варіант методу оцінної функції із застосуванням принципу управління за ведучою і веденою координатами.
Метод прогнозу і корекції Кожен цикл інтерполяції за методом прогнозу і корекції складається з двох етапів: на першому етапі виробляється груба оцінка (прогноз) координат наступної точки (вузла) інтерполяції, а на другому ці координати коригуються з метою підвищення точності та виключення можливості нагромадження похибок. Таким чином, задача побудови алгоритму інтерполяції зводиться до вибору методу прогнозу та методу корекції координат наступного вузла. Загальна ідея алгоритму показана на рис. 6.28.
Рис. 6.28. Інтерполяція за методом прогнозу та корекції На першому етапі за допомогою спрощеної модифікації методу ЦДА роблять прогнозуючий крок вздовж дотичної до траєкторії у поточній точці Mi:
Якщо точка Mi (х i, yi) належить дузі кола радіуса R, то точка Mi+1 (х i+1, yi+1) знаходиться поза колом радіуса R, оскільки перший наближений етап інтерполяції здійснюється вздовж дотичної до точки Mi. Тому на другому етапі здійснюється лінійна інтерполяція поодинокими кроками в напрямку до центра 0 кола вздовж прямої М i+10. Інтерполяція закінчується при зміні знака оцінної функції Fк, початкове значення якої в точці Mi+1 складає Лінійна інтерполяція вздовж прямої М i+10 проводиться з використанням оцінної функції Fл = yi+1x – xi+1y, де x, у – координати поточної точки траєкторії лінійної інтерполяції. У процесі лінійної інтерполяції на кожному кроці по осі Х (при Fл < 0) виконуються такі операції: Fк = Fк – 2x + 1; Fл = Fл + yi+1; x = x – 1. Аналогічно на кожному кроці по осі Y (при Fл > 0 або Fл = 0) виконуються операції: Fк = Fк – 2y + 1; Fл = Fл – xi+1; y = y – 1. Зміна знака функції Fк говорить про те, що точка інтерполяційної траєкторії ввійшла в коло радіуса R з відхиленням, що не перевищує однієї дискрети. Різноманітність алгоритмів інтерполяції пояснюється необхідністю компромісу між прагненням до високої точності обчислень з одного боку, і бажанням вкластися в мінімальний за часом інтерполяційний цикл з іншого боку. Завершивши розгляд проблеми інтерполяції, перейдемо до чергової фази розв’язку геометричної задачі, що полягає в управлінні слідкуючими приводами подачі.
Розділ 6. АЛГОРИТМІЗАЦІЯ ЗАДАЧ ПРОГРАМНОГО УПРАВЛІННЯ В СИСТЕМАХ ВИКОНАВЧОГО РІВНЯ ГВС |
||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-04-09; Просмотров: 265; Нарушение авторского права страницы

 ,
,  ,
,  ;
;  .
.


 ;
;  ;
;  ;
;  .
. .
.