|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методи оцінної функції з прогнозуючим кроком
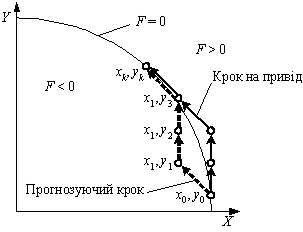
Трикоординатні лінійно-кругові інтерполятори здійснюють лінійну інтерполяцію одночасно за трьома координатами (X, Y, Z) і кругову інтерполяцію в одній із трьох площин обробки (XY, XZ чи YZ), що обираються за програмою. Напрямок чергового кроку інтерполяції в цих інтерполяторах відбувається за методом оцінної функції з прогнозуючим кроком, причому кроки здійснюються або по одній осі, або по двох одночасно (крок по діагоналі). Лінійна інтерполяція методом оцінної функції з прогнозуючим кроком. При лінійній інтерполяції вибирається ведуча (з найбільшою величиною переміщення) координата, відносно якої ведеться інтерполяція за двома іншими координатами. При цьому крок по ведучій координаті робиться завжди, а крок по веденій (меншій) – в залежності від знака оцінної функції. Розрізняють кроки прогнозуючі і кроки на привід подачі (робочий рух). Припустимо, що в І квадранті ведучою є координата х, а веденою координата у. При інтерполяції відрізка ОА прогнозуючі кроки здійснюються звичайним порядком (рис. 6.22): якщо F > 0, виконується крок по осі X; якщо F < 0 – по осях X, Y одночасно (тобто крок по діагоналі). Кроки на привід відстають від прогнозуючих на один такт, тобто знак оцінної функції, отриманої в результаті прогнозуючого кроку, визначає напрямок поточного кроку на привід.
Рис. 6.22. Лінійна інтерполяція методом оцінної функції Оскільки F0 = 0, перший прогнозуючий крок виконується по осі Х і перша проміжна точка траєкторії прогнозуючих кроків (x1, y0) знаходиться в області F < 0. Внаслідок цього перший крок на привід виконується по діагоналі так само, як і другий прогнозуючий крок. Друга проміжна точка траєкторії (x2, y1) знаходиться в області F < 0, і другий крок на привід (так само, як і третій прогнозуючий крок) виконується по діагоналі. Третій крок на привід і четвертий прогнозуючий крок виконуються по осі Х і т.д. При прогнозуючому кроці по осі Х оцінна функція має вигляд: Fi+1 = Fi – Y, де Y – кадровий приріст відповідної координати, Y = yk. При прогнозуючому кроці по осі Х і Y (по діагоналі) оцінна функція буде: Fi+1 = Fi – Y + X, де X – кадровий приріст відповідної координати, X = xk. Отже, загалом алгоритм лінійної інтерполяціїї з прогнозуючим кроком наступний: – якщо F > 0 або F = 0, то наступний прогнозуючий крок виконується по ведучій координаті; – якщо F < 0, то наступний прогнозуючий крок виконується одночасно по ведучій та веденій координатам; – крок на привід відстає на один такт від прогнозуючого і відповідає наступному прогнозуючому кроку. Кругова інтерполяція методом оцінної функції з прогнозуючим кроком. Кругова інтерполяція дещо відрізняється від лінійної тим, що необхідно враховувати той факт, що при проходженні лінії переключення ведуча і ведена координати міняються місцями. Тому при круговій інтерполяції застосовується два окремих алгоритми проведення розрахунку. При круговій інтерполяції проти годинникової стрілки в першому за напрямком руху напівквадраті першого квадранта (рис. 6.23), для якого максимальним координатним переміщенням є зсув по осі Y, кроки виконуються або по осі Y, або по діагоналі. Якщо у проміжній точці траєкторії прогнозуючих кроків F > 0, то виконується прогнозуючий крок по діагоналі, якщо F < 0 – по осі ведучої координати Y. Кроки на привід виконуються після виділення нового значення оцінної функції і збігаються за напрямком з наступним прогнозуючим кроком.
Рис. 6.23. Кругова інтерполяція методом оцінної функції При прогнозуючому кроці по осі Y координата дорівнює yi+1 = yi + 1, а оцінна функція: Fi+1 = Fi + 2yi + 1. При прогнозуючому кроці по діагоналі координати змінюються yi+1 = yi + 1, xi+1 = xi – 1, а оцінна функція дорівнює: Fi+1 = Fi + 2yi + 2xi + 2. При круговій інтерполяції проти годинникової стрілки в другому за напрямком руху напівквадраті першого квадранта кроки виконуються: при F > 0 – по осі ведучої координати Х, а при F < 0 – по діагоналі. При прогнозуючому кроці по осі Х координата xi+1 = xi – 1, оцінна функція: Fi+1 = Fi – 2xi + 1. Кроки по діагоналі в кожному окремому випадку вибираються з метою кращого (плавного) наближення до заданої траєкторії, що інтерполюється. Одночасний рух по обох осях призводить до зниження похибки апроксимації кола та прямої. Враховуючи, що кругова інтерполяція може виконуватися у двох напрямках руху за і проти годинникової стрілки існує 8 варіантів застосування алгоритмів проведення розрахунків інтерполяції (рис. 6.24).
Рис. 6.24. Правило застосування алгоритму кругової інтерполяції методом оцінної функції з прогнозуючим кроком Узагальнений алгоритм кругової інтерполяції складається з наступних режимів: Режим 1 (точки знаходяться до лінії переключення координат): – якщо F > 0 або F = 0, то прогнозуючий крок виконується по ведучій та веденій координатах; – якщо F < 0, то прогнозуючий крок виконується по ведучій координаті. Режим 2 (точки знаходяться після лінії переключення координат): – якщо F > 0 або F = 0, то прогнозуючий крок виконується по ведучій координаті; – якщо F < 0, то прогнозуючий крок виконується по ведучій та веденій координатах; – крок на привід відстає на один такт від прогнозуючого і відповідає наступному прогнозуючому кроку. Аналіз показує, що використання фіксованого циклу із розрахунку одного кроку інтерполяції в межах кожного циклу висуває надмірно високі вимоги щодо швидкодії обчислювача або накладає обмеження на швидкісні можливості верстата, змушуючи зменшувати частоту фіксованих циклів. Тому метод оцінної функції в чистому вигляді можна використовувати лише при апаратній реалізації інтерполятора.
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 286; Нарушение авторского права страницы