
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Розрахунок траєкторії руху робочого органу технологічного устаткування
З моменту активізації управляючої програми в автоматичному циклі її інформація включається у процес обчислення. Важливу роль в цьому процесі відіграє підготовка буферного кадру, необхідна на стільки, що вихідні тексти управляючої програми можуть не містити у явному вигляді всієї інформації, необхідної для траєкторних розрахунків. Підготовка буферного кадру включає розрахунки еквідистант, перетворення координатних систем, визначення даних, що використовуються алгоритмами інтерполяції на другій фазі реалізації геометричної задачі пристроїв ЧПУ, тобто у випадку програмування руху робочого органу як у ручному режимі (програмування еквідистанти контуру обробки), так і в безеквідистантному режимі (програмування безпосередньо контуру деталі) з’являються наступні задачі обчислювального характеру: визначення координат опорних точок еквідистантного контуру, синтез додаткових кадрів руху робочого органу, необхідних для поєднання суміжних ділянок контуру, перетворення координат основного контуру деталі до координат еквідистантного контуру руху робочого органу. Розрахунок опорних точок еквідистантного контуру. Обробка контуру проводиться інструментом фіксованого (незмінного) розміру. Очевидно, координати траєкторії центра інструмента, наприклад, фрези, радіуса rф (рис. 6.9) відрізняються від координат контуру деталі, поданих в кадрі управляючої програми.
Рис. 6.9. Поєднання ділянок контуру еквідистанти Розрахунок зміщення опорних точок еквідистантного контуру відносно контуру деталі (наприклад, точки Ac відносно A) повинен автоматично виконуватись пристроєм ЧПУ або верстатником-технологом при ручному програмуванні еквідистанти. Ця задача є відносно простою тільки при гладкому (плавному ) поєднанні елементів контуру (з кутом з‘єдання елементів b = 180°), наприклад, при поєднанні елементів 2, 3, 4. У цьому випадку довжина прямолінійних ділянок не змінюється і розрахунок еквідистантних зміщень проводиться тільки для кадрів, у яких запрограмована дуга кола. Цей розрахунок виконується з використанням значень координат центра кола I, J і приростів координат X, Y між початковою та кінцевою точками дуги (рис. 6.10), які задаються у кадрі програми.
Рис. 6.10. Гладке поєднання елементів контуру Неважко побачити, що проекції зміщення Iс, Jс початкової точки на вісь Х та вісь Y визначаються виразами:
де rф – радіус інструмента. Відповідно проекції Хc, Yс зміщення кінцевої точки:
Розрахунок зміщень значно ускладнюється за наявності зламів контуру, що програмується (при кутах з‘єднання елементів контуру b> 180° або b< 180°). Найчастіше у цьому випадку при куті 0°< b< 90° використовується метод зв‘язуючої дуги (поєднання елементів 5 і 6, 10 і 11), суть якого полягає в тому, що у програму вставляється додатковий кадр з круговим рухом, який відповідає обходу дуги з радіусом, рівним чи більшим rф (рис. 6.11, а). Наприклад, при поєднанні дугою елементів ламаної з координатами кінцевих точок X1, X2 і Y1, Y2 вирази для розрахунку координат центра дуги Iс, Jс та координат її кінця Хc, Yс у приростах визначаються формулами:
Метод зв‘язуючої дуги не завжди допустимий за технологією обробки, оскільки гострі зовнішні кути контуру деталі при обході по дузі виявляються сточеними (поєднання елементів 6 і 7, 9 і 10), а у внутрішніх кутах залишається дуже багато невибраного матеріалу (7 і 8). У цьому випадку доцільно застосовувати метод поєднання по лініях продовження еквідистант (при поєднанні прямих) або по лініях продовження дотичних до еквідистант (при поєднанні прямих та дуг кола).
а) б)
в) г) Рис. 6.11. Способи з’єднання елементів контуру при зламі а – метод зв‘язуючої дуги; б – метод продовження еквідистанти; в – метод перетину еквідистант; г – метод скорочених ліній продовження У методі продовження еквідистант (рис. 6.11, б) необхідно розрахувати опорну точку, яка є перетином елементів продовження еквідистантного контуру через розв’язок відповідних систем рівнянь першого (при поєднанні прямих) або другого порядку (при поєднанні прямих та дуг кола). Враховуючи обмежені можливості пристрою ЧПУ при розрахунку арифметичних виразів, розв’язання рівнянь є непростою задачею. Розглянемо її рішення на прикладі обходу точки поєднання двох прямих інструментом з радіусом rф (рис. 6.12).
а) б) Рис. 6.12. Розрахунок з‘єднання двох прямих: Аналітичні вирази суттєво спрощуються, якщо основний контур повернути на кут a так, щоб ділянка з координатами X1, Y1 співпала з віссю абсцис. Розглядаючи трикутники BDE і AВС, отримуємо для значень еквідистантних зміщень розвернутого контуру (рис. 6.12, б):
де АС = DЕ = rф; L2 – довжина відрізка другої прямої; H – відстань від кінцевої точки другої прямої до першої прямої:
Із врахуванням наведеного вище отримаємо:
Для визначення знака у формулі для Xco необхідно порівняти величини:
та
Якщо L < Lо, то кут b – гострий і у формулі використовується знак “+”, у протилежному випадку – знак “-”. Суттєвою є та обставина, що для обчислення Хсо, Yco за формулою у повороті координатної системи немає необхідності, оскільки у формулу входять величини L1, L2, H, які є інваріантними до переміщень контуру. Поворот координат необхідний тільки на останньому етапі розрахунку при визначенні значень зміщень Хс, Yc у вихідній системі координат і проводиться відповідно до виразу:
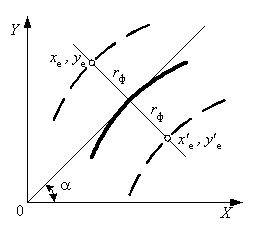
де З’єднання прямих і дуг кіл з використанням інваріант контуру дає ще більш помітне спрощення алгоритмів і скорочення часу обчислень. Необхідно зазначити, що якщо зовнішній кут контуру деталі b > 180° стає внутрішнім (рис. 6.11, в), то точка з’єднання знаходиться на перетині еквідистант суміжних ділянок контуру (поєднання елементів 7 і 8). Проте, якщо зовнішній кут контуру деталі b – гострий (0° < b < 90°), то застосування методу з’єднання по лініях продовження стає неефективним з точки зору витрат часу на перехід від однієї ділянки контуру до суміжної. В такому випадку часто витрачений час найчастіше може бути зменшений за рахунок скорочення довжини ліній продовження до величини радіуса фрези rф і побудови траєкторії з трьох прямих (рис. 6.11, г). Крім того, такий спосіб дозволить застосувати на другій прямій максимальну швидкість приводів подачі і призначити встановлююче переміщення у зв’язку з тим, що не відбувається контакту інструмента з деталлю. Перетворення координатних систем. Перехід від координат x0, у0 основного контуру до координат xе, уе еквідистантного контуру для прямих і кіл (рис. 6.13) здійснюється за формулами:
або
де k = tg a; rф – радіус фрези, для якого підраховується еквідистанта; a – кут нахилу дотичної в точці x0, у0. Знак “+” або “–” застосовується в залежності від розташування інструмента при обході контуру деталі відповідно ліворуч або праворуч, якщо дивитися в напрямку руху інструмента.
Рис. 6.13. Перетворення координат контуру деталі Даний розрахунок виконується при призначенні в кадрі управляючої програми підготовчих функцій “Корекція на радіус фрези” G41, G42. Також у пристроях ЧПУ може виконуватися перетворення координат у випадку врахування довжини робочого інструмента. Для цього в кадрі управляючої програми використовуються підготовчі функції “Корекція довжини інструмента” G43, G44, що є вказівкою додати значення довжини до координати або відняти від координати, заданої в кадрі. Скасування всіх корекцій контуру на розміри інструмента виконується підготовчою функцією G40. Крім перетворення координат, у пристроях ЧПУ може виконуватися перетворення швидкостей подачі. Розрахунок швидкості подачі здійснюється з метою забезпечення при управлінні сталості контурної швидкості і полягає у розкладі вектора контурної швидкості на складові в декартовой системі координат. Для лінійних контурів справедливі наступні співвідношення:
де V, Vx, Vy – відповідно контурна швидкість подачі та її складові; Dх, Dy – кадрові переміщення по осях X, Y. Для кругових контурів справедливі співвідношення:
де xi, yi – координати поточної точки дуги кола відносно його центра; xц, уц – координати центра дуги відносно її початкової точки. Визначення складових вектора швидкості подачі не є самоціллю і проводиться лише в тих випадках, коли цього вимагають алгоритми інтерполяції й алгоритми управління приводами подачі.
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 366; Нарушение авторского права страницы


 ;
;  ,
,  – радіус кола;
– радіус кола;  ;
;  .
. ;
;  ;
;  ;
;  ;
;  ;
;  .
.




 ;
;  ;
;  ;
;  ;
;  .
. ;
; 
 .
. ,
,  ,
,  .
. ;
; 
 ;
;  ,
, 
 ;
;  ,
,  ;
;  ,
,